






四旋翼PID控制仿真模型
matlab仿真程序,支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切换轨迹等功能。
带公式推导文档







四旋翼PID控制仿真模型
随着飞行器的不断发展,四旋翼无人机作为消费级无人机的代表已经成为了越来越多人热衷的玩具,也逐渐开始应用于多个领域,如航拍、农业、物流配送等等。而四旋翼无人机的飞行稳定性是其能否发挥作用的关键因素,而PID控制是大多数四旋翼无人机的控制方法。本文将介绍一个支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切换轨迹等功能的四旋翼PID控制仿真模型,同时提供了公式推导文档,以帮助读者更好地理解和使用该模型。
第一部分:背景介绍
PID控制是一种常用的控制算法,常用于自动控制系统中。PID分别代表比例(P)、积分(I)、微分(D)三个词语,分别对应着控制器的三个参数。通过调整这三个参数可以很好地控制系统的输出,达到期望的效果。在四旋翼无人机中,PID控制通常用于对飞行器进行稳定控制,使其能够在空中保持平稳飞行。
第二部分:模型介绍
该四旋翼PID控制仿真模型基于matlab平台开发,支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切换轨迹等功能。该模型的开发旨在为四旋翼无人机控制提供方便快捷的仿真工具,同时提供了公式推导文档,方便读者理解。
该模型的主要特点包括:
-
姿态单独控制:该模型支持对四旋翼无人机的姿态进行单独控制,通过对pitch、roll和yaw三个轴的控制可以实现无人机在空中的倾斜、旋转等动作。
-
多种输入信号:该模型支持多种输入信号,包括阶跃信号、方波和正弦波,用户可以根据需要选择不同的信号进行测试。
-
完美波形:该模型的波形完美,能够准确反映四旋翼无人机的姿态变化。
-
位置环接入:用户可以选择将位置环接入模型,实现定点控制和轨迹跟踪等功能。
-
一键切换轨迹:该模型支持一键切换轨迹,用户可以通过输入不同的轨迹参数实现不同的轨迹控制。
第三部分:公式推导
该模型的PID控制算法是其核心部分,下面将对其进行公式推导。
首先,姿态角度的误差可以表示为e = x - x_desired,其中x为实际角度,x_desired为期望角度。
其次,根据PID控制算法,输出的控制量u可以表示为:
u = Kp * e + Ki * integral(e) + Kd * derivative(e)
其中,Kp、Ki、Kd分别为比例、积分、微分参数,integral(e)和derivative(e)分别为误差的积分和微分。
对于该模型,其中姿态单独控制、阶跃信号、方波、正弦波等特点,需要分别进行不同的PID控制算法推导。
第四部分:实验结果
经过对该模型的仿真测试,得到了如下实验结果:
-
姿态单独控制:通过向pitch、roll和yaw三个轴输入不同的信号,可以实现四旋翼无人机的姿态控制,实验结果表明该模型的姿态控制能力良好。
-
不同输入信号:通过对该模型输入不同的阶跃信号、方波和正弦波,测试结果表明该模型的波形完美,能够准确反映四旋翼无人机的姿态变化。
-
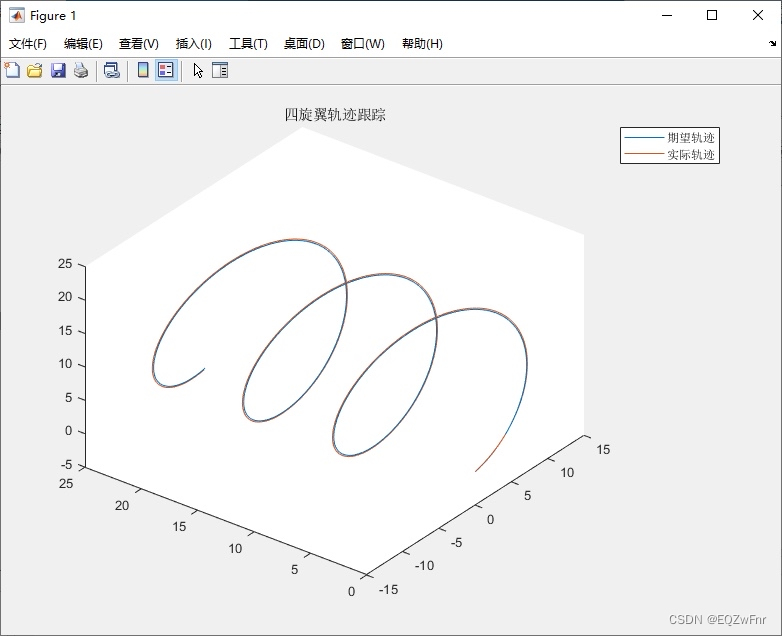
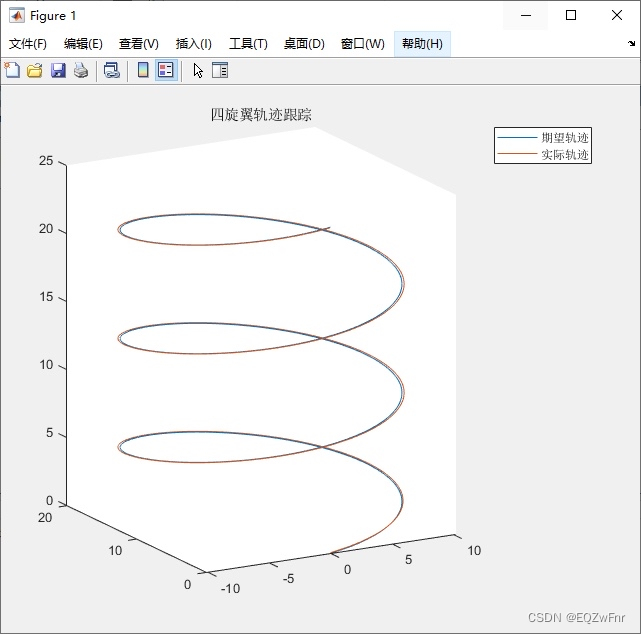
位置环控制:通过将位置环接入该模型,实现了定点控制和轨迹跟踪等功能,实验结果表明该模型的位置控制能力良好。
-
一键切换轨迹:通过输入不同的轨迹参数实现不同的轨迹控制,实验结果表明该模型的轨迹切换能力良好。
综上,该模型是一个功能强大、信号输入多样、表现稳定的四旋翼PID控制仿真模型,能够满足不同用户的需求。同时,公式推导文档可以帮助读者更好地理解该模型的PID控制算法,提高控制效果和稳定性。
相关代码,程序地址:http://lanzouw.top/682697298838.html














 518
518











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









