







未建模且日益复杂的空气动力学是精确飞行控制最显著的挑战之一。在多风环境中飞行(如图1所示),由于无人机、诱导气流和风之间的不稳定空气动力相互作用,导致更加复杂(烟雾可视化见图1F)。这些非定常和非线性气动效应极大地降低了常规无人机控制方法的性能,而这些方法在控制设计中忽略了它们。

图1 通过狭窄的大门敏捷飞行。
在(A)中, 加州理工学院真实天气风洞系统、四旋翼无人机和闸门。在我们的飞行测试中,无人机在具有挑战性的风条件下,通过比无人机本身略宽的狭窄大门,沿着灵活的轨迹飞行。(B和C)闸门试验所用的轨迹。
在(B)中,无人机在风速为3.1米/秒或随时间变化的风况下,通过一个闸门遵循图8。
在(C)中,无人机在水平面上通过两扇大门沿着一个椭圆形飞行,风速为3.1米/秒(D和E),长曝光照片(曝光时间为5秒),显示两项任务中的一圈。(F至I)高速照片(快门速度为1/200秒),显示无人机通过大门的瞬间以及无人机与风之间的相互作用。
我们提出了一种称为神经飞行的数据驱动方法,这是一种基于深度学习的轨迹跟踪控制器,可以学习快速适应快速变化的风况。我们的方法,如图2所示,对自适应飞行控制和基于深度学习的机器人控制进行了改进并提供了见解。我们的实验表明,在标准无人机上,神经飞行可以在动态风条件下实现厘米级的位置误差跟踪。
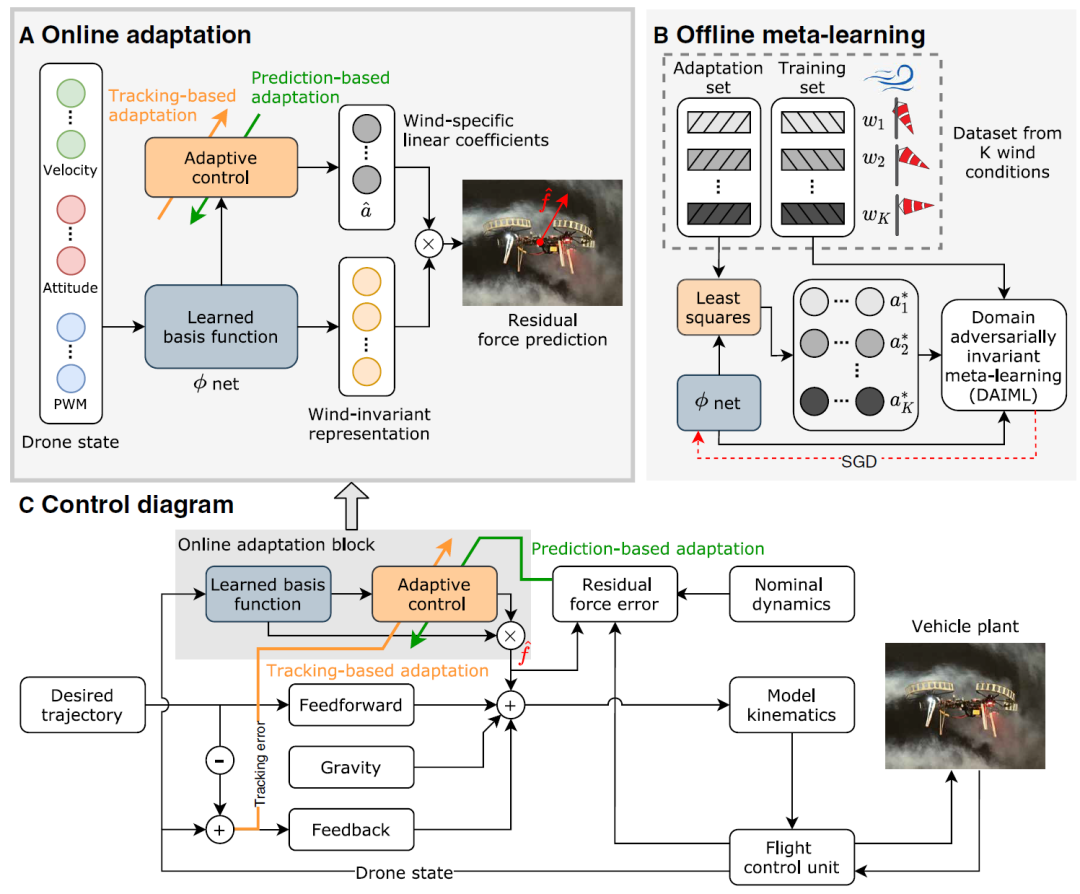
图2:离线元学习和在线自适应控制设计。
(A) 自适应控制器中的在线自适应块。
(B) 我们的元学习算法DAIML的说明。
(C) 我们的控制方法图,其中灰色部分对应于(A)。
风况设计
为了为数据收集和实验生成动态和多样的风况,我们利用了最先进的加州理工学院真实天气风洞系统(图1A)。风洞是一个由1296个独立可控风扇组成的3米×3米阵列,能够产生高达43.6公里/小时的风力条件。分布式风扇由基于Python的应用程序编程接口(API)实时控制。为了进行数据收集和飞行试验,我们设计了两种类型的风况。对于第一种类型,每个风机具有0到43.6 km/h(12.1 m/s)之间的均匀恒定风速。第二类风在时间上遵循正弦函数,例如30.6+8.6 sin(t)km/h。请注意,培训数据仅涵盖高达6.1米/秒的恒定风速。为了可视化风,我们使用了五个烟雾发生器来指示风况的方向和强度(参见图1)
使用DAIML的离线学习和在线自适应控制开发数据 收集和元学习
数据采集频率为50 Hz,共有36000个数据点。图3A显示了数据收集过程,图3B显示了13.3 km/h(3.7 m/s)风速条件下训练数据的输入和标签。图3C显示了不同风况下输入数据(螺距)和标签数据(气动力的x分量)的分布。风况的变化会导致输入域和标签域的分布变化,这促使DAIML的算法设计。在Intel Aero无人机上重复相同的数据收集过程,以研究学习的表示是否可以推广到不同的无人机。

图3 训练数据收集。
(A) 沿2分钟随机轨迹的xyz位置,用于使用加州理工学院真实天气风洞中的风速为8.3公里/小时(3.7米/秒)。
(B) 我们学习模型的输入(速度、姿态四元数和电机速度PWM命令)和标签(气动残余力离线计算)的典型10秒轨迹,对应于(A)中突出显示的部分。
(C) 显示不同风况下数据分布的直方图。左:风效应力的x分量分布,fx。这表明空气动力效应随风的变化而变化。右图:音高分布,作为学习模型输入的状态组件。这表明风条件的变化会导致输入的分布变化。
在为我们的定制无人机和Intel Aero无人机收集的数据集上,我们应用DAIML算法学习两种表示风的影响。学习过程在普通台式计算机上离线完成,如图2B所示。图4显示了学习过程中线性系数(a*)的演变,其中DAIML学习所有风条件共享的空气动力效应的表示,线性系数包含风的特定信息。此外,从不同风况下的线性系数很好地分离的意义上可以解释学习到的表示(见图4)。
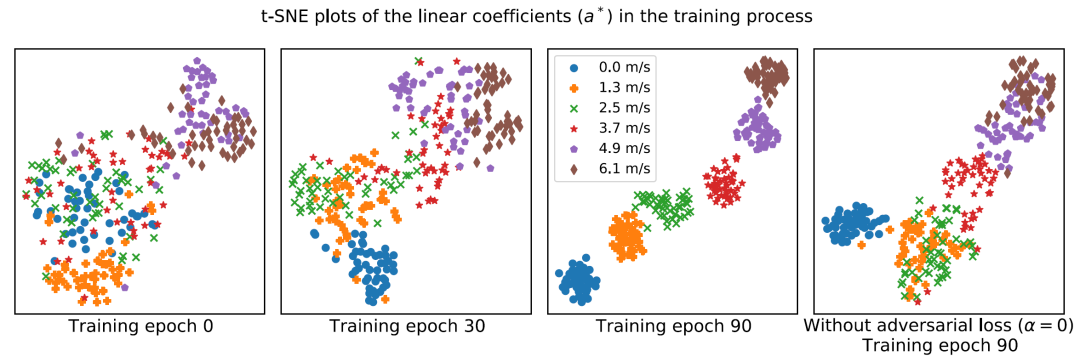
图4 t-SNE图显示了训练过程中线性权重(a*)的演变。随着训练次数的增加,a*的分布变得更加密集,风速簇彼此接近。聚类还有一个物理意义:经过训练收敛后,右上角对应的风速较高。这表明DAIML成功地学习了基函数由所有风条件共享,风相关信息包含在线性权重中。
轨迹跟踪性能
当无人机沿着2.5米宽、1.5米高的figure-8弹道飞行,在0公里/小时的恒定均匀风速下,圈速为6.28秒时,我们定量比较了上述控制方法的性能。每个实验的飞行轨迹如图5所示,其中包括一个预热圈和六个6.28秒的圈。非线性基线积分项补偿第一圈内的平均模型误差。随着风速的增加,空气动力变化变得更大,我们注意到性能大幅下降。
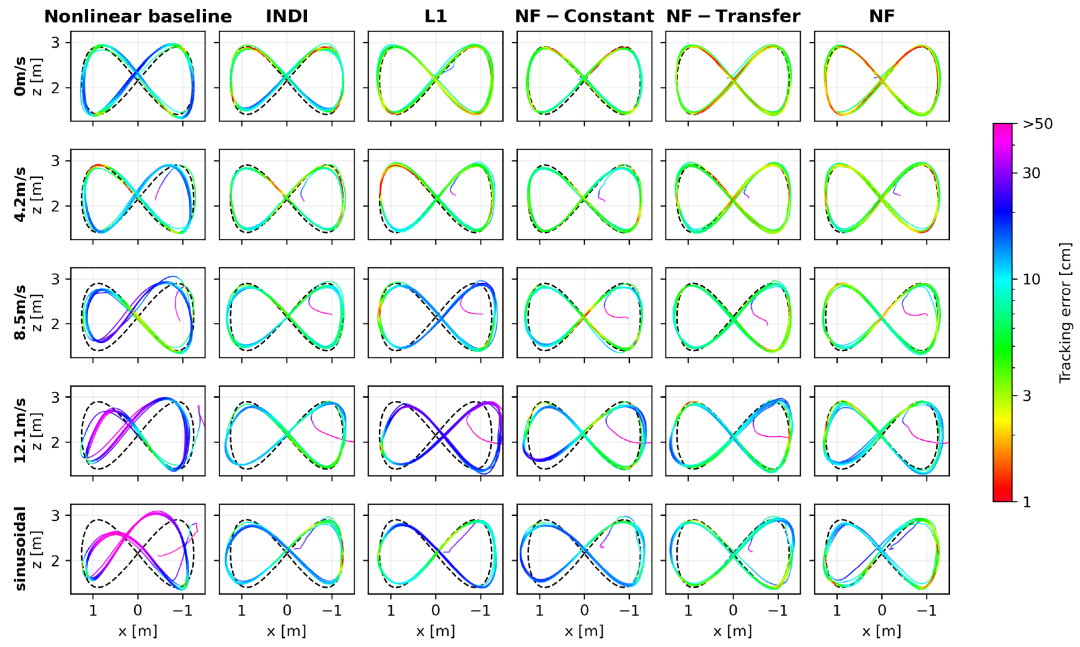
图5 然而,在较高的风速下,性能会显著下降
户外实验
我们在微风条件下(风速高达17公里/小时)在室外测试了我们的算法。车载GPS接收机向EKF提供位置信息,状态估计精度较低,因此空气动力残余力估计精度较低。在上述相同的图8轨迹之后,控制器达到7.5 cm的平均跟踪误差,如图7所示。
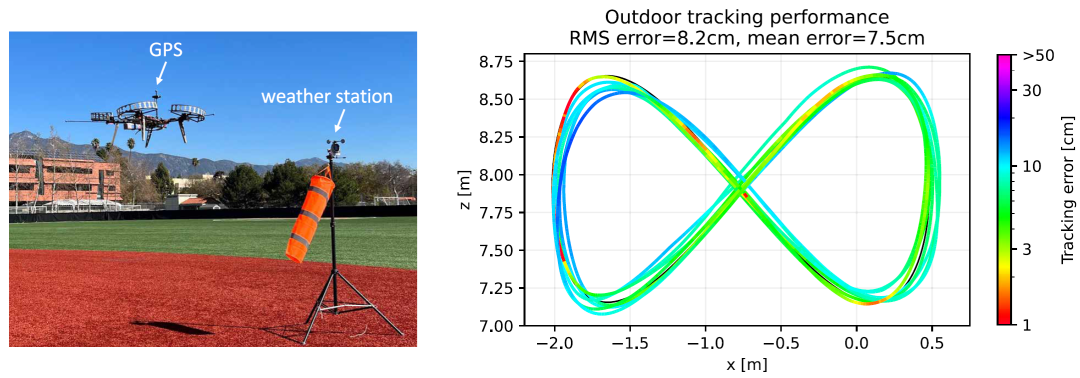
图6 室外飞行设置和性能。左:在室外实验中,部署了GPS模块进行状态估计,气象站记录风廓线。试验期间的最大风速约为17 km/h(4.9 m/s)。右图:神经蝇的轨迹跟踪性能。
当在加州理工学院真实天气风洞产生的具有挑战性的风况下进行评估时,风速高达43.6公里/小时(12.1米/秒),与最先进的非线性和自适应控制器相比,神经飞行实现了精确的飞行控制,跟踪误差大大减小。除了强大的经验性能外,神经飞行的指数稳定性还保证了鲁棒性。最后,我们的控制设计外推到了看不见的风况,结果表明,对于只有机载传感器的室外飞行是有效的,并且可以在性能退化最小的情况下跨无人机传输。
·
源自:O’Connell et al., Sci. Robot. 7, eabm6597 (2022) 4 May 2022
















 283
283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









