






 本文详细阐述了基于Simulink的四旋翼无人机轨迹跟踪与MPC控制技术,介绍了无人机概念、Simulink在无人机控制中的应用、轨迹跟踪和MPC算法原理,以及实验结果和相关代码资源。
本文详细阐述了基于Simulink的四旋翼无人机轨迹跟踪与MPC控制技术,介绍了无人机概念、Simulink在无人机控制中的应用、轨迹跟踪和MPC算法原理,以及实验结果和相关代码资源。
四旋翼无人机simulink轨迹跟踪 mpc 文档解释说明
标题:基于Simulink的四旋翼无人机轨迹跟踪与MPC控制技术分析
摘要:本文基于Simulink平台,通过对四旋翼无人机轨迹跟踪与MPC控制技术的详细解释与分析,实现了对该领域的深入理解。首先介绍了四旋翼无人机的概念与发展现状,随后详细探讨了Simulink在无人机控制方面的优势与应用,重点关注了轨迹跟踪与MPC控制算法的原理与实现。通过本文的阐述,读者将能够全面了解四旋翼无人机控制中的关键技术,并能够在实际应用中灵活运用。
一、引言 随着无人机技术的飞速发展,四旋翼无人机成为了航空领域中的热点研究方向之一。无人机的轨迹跟踪与MPC(Model Predictive Control)控制技术在提高飞行精度和航空安全方面发挥了重要作用。本文基于Simulink的优势,对四旋翼无人机轨迹跟踪与MPC控制技术进行了详细解释与分析。
二、四旋翼无人机的概念与发展
- 四旋翼无人机的概念与原理
- 四旋翼无人机的应用领域
- 四旋翼无人机在航空领域的发展现状
三、Simulink在无人机控制方面的优势与应用
- Simulink的概述与特点
- Simulink在无人机控制中的应用案例
- Simulink在无人机轨迹跟踪与MPC控制中的优势
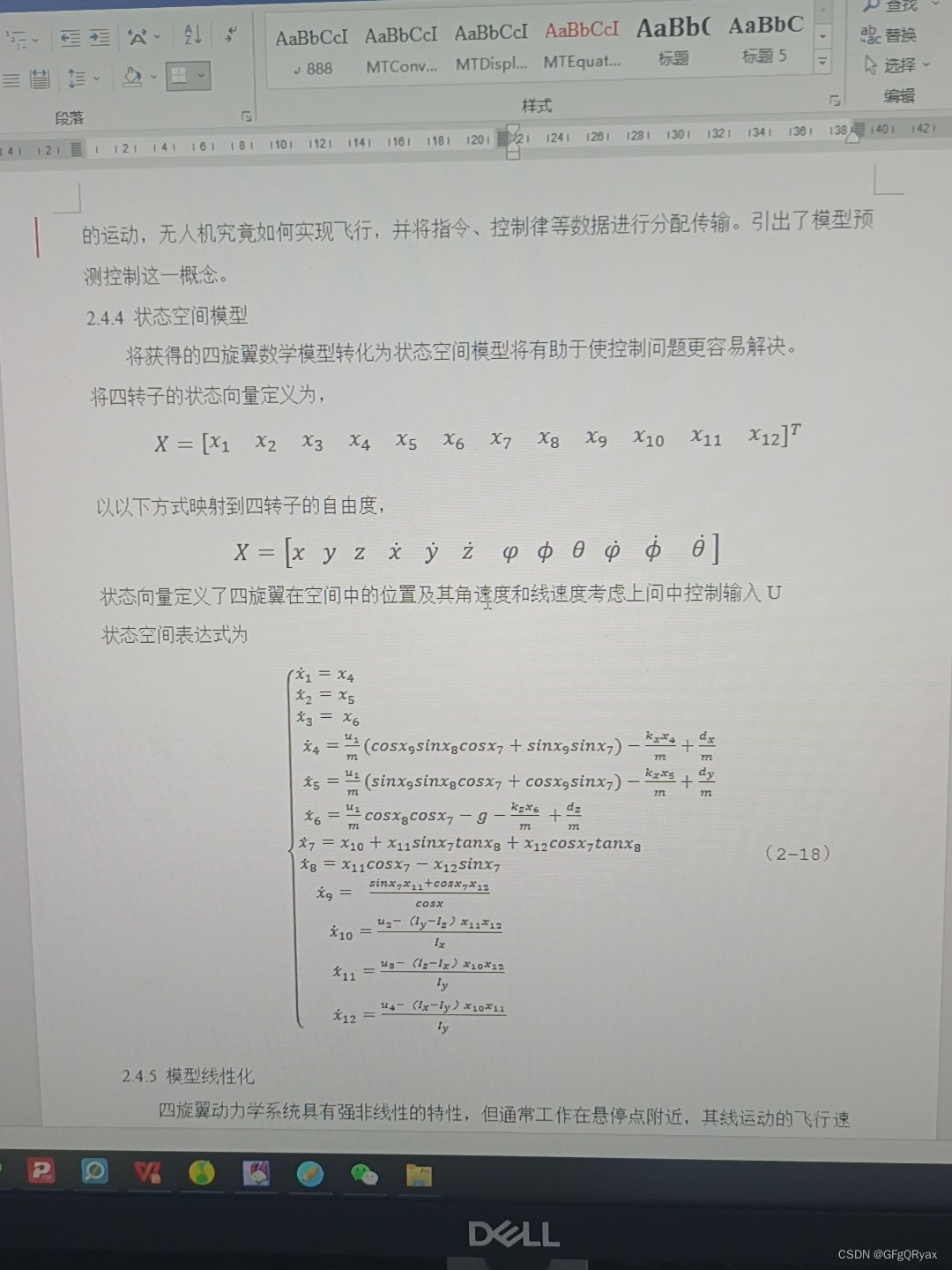
四、轨迹跟踪与MPC控制算法的原理与实现
- 轨迹跟踪算法的原理与实现 a. PID控制算法的基本原理 b. 优化算法在轨迹跟踪中的应用
- MPC控制算法的原理与实现 a. MPC控制算法的基本原理 b. MPC控制算法在四旋翼无人机中的应用
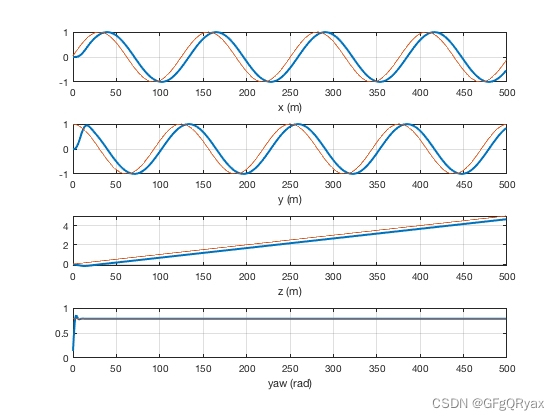
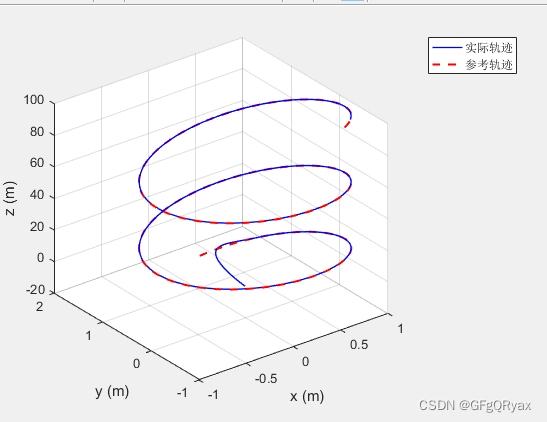
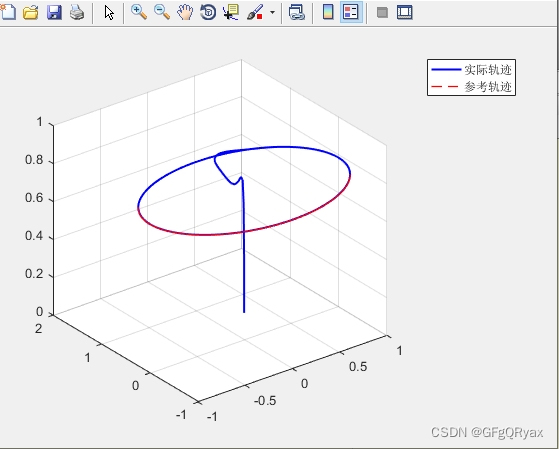
五、实验与结果分析
- 实验设置与参数选择
- 实验数据的采集与分析
- 结果分析与优化方向的探讨
相关代码,程序地址:http://lanzoup.cn/674327330628.html


















 3913
3913

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









