






分布式驱动电动汽车的电机转矩控制最优分配策略,进而调整车辆行驶姿态来实现操稳性控制。
本模型上层采用的是横摆角速度和质心侧偏角滑膜控制模块计算补偿的横摆转矩,下层转矩控制采用的是最优控制和平均分配控制。
本模型控制方面具体分为以下几个模块:七自由度模块;横摆角速度+质心侧偏角联合系数分配模块;横摆角速度滑膜跟随模块;质心侧偏角滑膜跟随模块;滑移率安全保障模块;转矩分配模块;通过上下层联合控制保证了汽车的操作稳定性。
本模型提供详细的推导过程和参考文献,提供。
ID:38500722604536385
嚣张的奥利奥
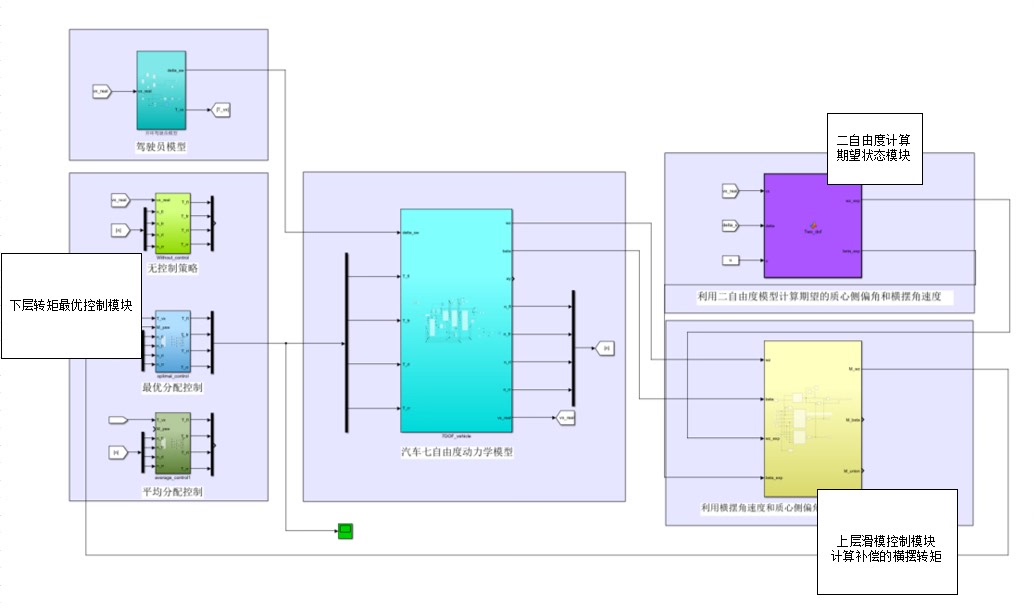
分布式驱动电动汽车的电机转矩控制最优分配策略,进而调整车辆行驶姿态来实现操稳性控制。本模型上层采用的是横摆角速度和质心侧偏角滑膜控制模块计算补偿的横摆转矩,下层转矩控制采用的是最优控制和平均分配控制。本模型控制方面具体分为以下几个模块:七自由度模块;横摆角速度+质心侧偏角联合系数分配模块;横摆角速度滑膜跟随模块;质心侧偏角滑膜跟随模块;滑移率安全保障模块;转矩分配模块;通过上下层联合控制保证了汽车的操作稳定性。本模型提供详细的推导过程和参考文献,提供。
近年来,随着环保意识的不断提高和对能源未来的担忧,电动汽车逐渐成为汽车行业的热门话题。而分布式驱动电动汽车作为一种新兴的驱动方式,具有高效能量利用和优化驾驶操控等特点,受到了广泛关注。其中,电机转矩控制对于分布式驱动电动汽车的性能和操稳性具有重要影响。本文将介绍一种分布式驱动电动汽车的电机转矩控制最优分配策略,并通过调整车辆行驶姿态来实现操稳性控制。
本模型采用了上下两层控制结构。上层控制通过横摆角速度和质心侧偏角滑膜控制模块来计算补偿的横摆转矩,下层控制则采用了最优控制和平均分配控制。通过这种两层控制结构,能够有效地调整电机转矩,从而实现车辆的操稳性控制。
具体而言,本模型包括以下几个模块。首先是七自由度模块,它用于描述车辆的运动学和动力学特性。在这个模块中,需要考虑车辆的转向、加速度和制动等因素,以便更准确地计算出电机转矩的最优分配策略。其次是横摆角速度与质心侧偏角联合系数分配模块,它用于根据车辆当前的状态和驾驶员的操控指令,确定不同转向和侧偏角下的电机转矩分配比例。然后是横摆角速度滑膜跟随模块和质心侧偏角滑膜跟随模块,它们用于根据车辆的横摆角速度和质心侧偏角的滑膜控制,来计算补偿的横摆转矩。此外,为了确保安全性,本模型还包括滑移率安全保障模块,它可以根据车辆的滑移率来调整电机转矩的分配策略。最后是转矩分配模块,它根据上述模块计算出的各种信息,来决定每个电机的实际转矩分配情况。通过这些模块的联合控制,可以保证汽车的操作稳定性。
总的来说,本模型提供了一种分布式驱动电动汽车的电机转矩控制最优分配策略,通过调整车辆行驶姿态来实现操稳性控制。通过上下两层控制结构和多个控制模块的协同作用,能够有效地计算出电机转矩的最优分配策略,并实现汽车的操作稳定性。本模型的详细推导过程和参考文献可以提供给相关研究者进行进一步的研究和应用。
综上所述,分布式驱动电动汽车的电机转矩控制最优分配策略对于提升汽车的操稳性具有重要意义。本模型通过上下两层控制结构和多个控制模块的协同作用,能够实现电机转矩的最优分配,并通过调整车辆行驶姿态来实现操稳性控制。希望本文能为相关领域的研究和应用提供有价值的参考。
【相关代码,程序地址】:http://fansik.cn/722604536385.html


















 2335
2335

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









