







前几天都在搞pixhawk源码编译问题,什么在window下用Console或者eclipse,还是在Ubuntu下,都做了,而且把.mk文件都看了,结果还是有bug。。。。
总结一下三种方法特点:
(1) 用eclipse需要配置路径,容易搞错;
(2) 在Ubuntu14.04下需要配置编译环境,比较麻烦;
(3) 相比前两种,win下采用Toolchain中的Console是最简单的。
下面分享一个最简单、最无脑的winodws(win7)下编译ardupilot源码的方法:
现在发现官网是最直接有效的方法:
(网址:http://ardupilot.org/dev/docs/building-px4-with-make.html)
STEP1: 下载GIT,并安装
注意一定要下载32位,官网下载即可(https://git-scm.com/download/win)
默认安装路径安装即可(建议安装在C盘)。
STEP2:安装PX4_Toolchain
下载最新的开发工具链pixhawk_toolchain_installer_latest.exe,默认安装即可。(注意一定要装在C盘)下载网址:
http://firmware.ap.ardupilot.org/Tools/PX4-tools/pixhawk_toolchain_installer_latest.exe
安装成功后会有(图一):
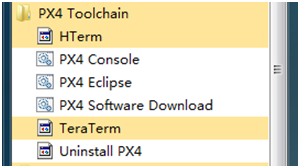
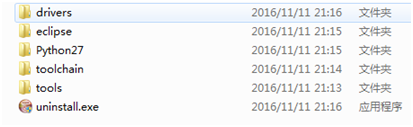
同时在C盘根目录有pixhawk_toolchain文件夹;
打开文件夹(图二):
STEP3:git下载ardupilot源码
打开图一中PX4 Console:
直接输入:git clone https://github.com/ArduPilot/ardupilot.git
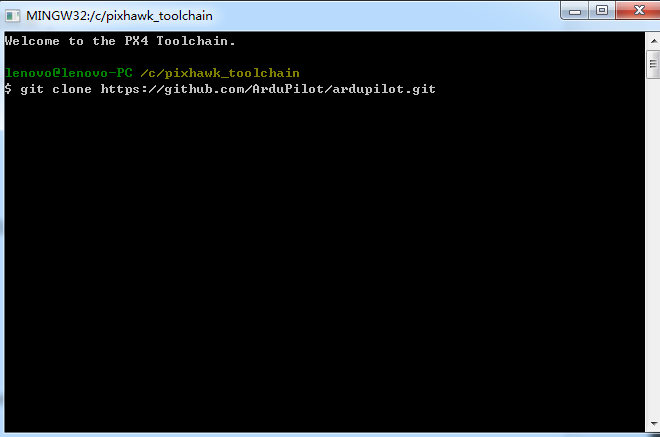
等待下载(速度有点慢)
STEP4:下载其它modules
在PX4 Console中输入:
git submodule update –init –recursive
(下载时间也有点长。。。。)
STEP5:编译
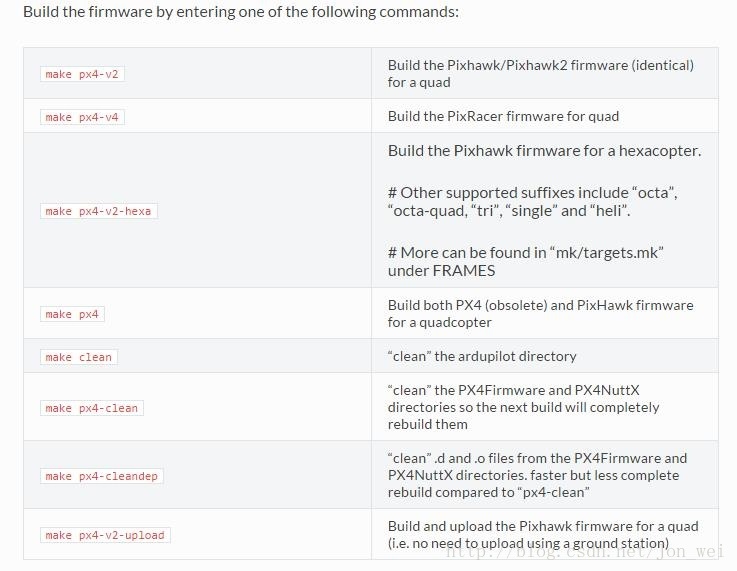
输入:make px4-v2
编译时间比较长,完成界面如下:
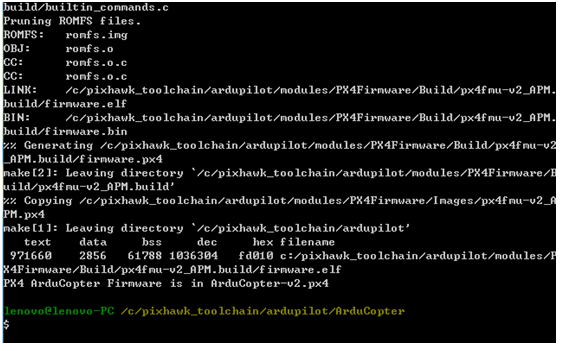
最终的编译文件就是:

STEP6:下载到开发板中
方法一:使用missionplanner烧写
点击
初始设置/安装固件/加载自定义固件
如图

选择 ArduCopter-v2.px4 文件
等待下载完成即可!
方法二:在控制台 使用 make px4-v2-upload 命令
附:编译命令表
希望这篇博客能给初学者一点帮助,少走弯路。。。。。
关于在Ubuntu14.04下的编译过程,下一篇博客我会讲。。















 1074
1074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









