







 本文介绍了CVPR2017的CNN-SLAM方法,该方法结合CNN预测的深度图与SLAM,实现实时稠密单目SLAM。通过关键帧筛选、CNN预测深度和语义分割、束调整优化,构建三维地图。主要贡献在于不确定性传播框架,优化深度估计并融合到全局场景中,同时进行语义地图构建。
本文介绍了CVPR2017的CNN-SLAM方法,该方法结合CNN预测的深度图与SLAM,实现实时稠密单目SLAM。通过关键帧筛选、CNN预测深度和语义分割、束调整优化,构建三维地图。主要贡献在于不确定性传播框架,优化深度估计并融合到全局场景中,同时进行语义地图构建。
CVPR2017_CNN-SLAM Real-time dense monocular SLAM with learned depth prediction
关键词:基于CNN的单张图深度估计,语义SLAM,半稠密的直接法SLAM
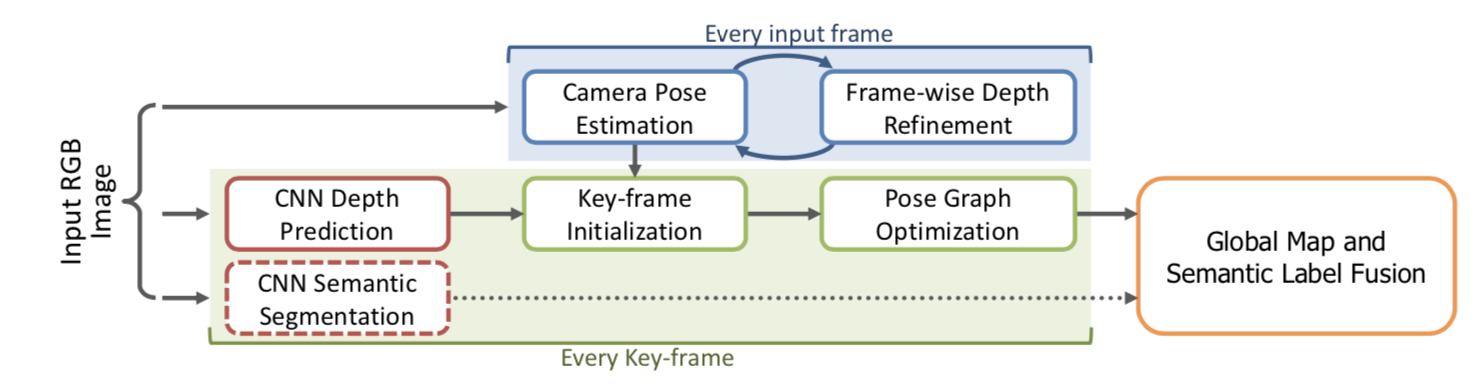
作者提出了一个利用CNN结合SLAM的应用,其SLAM过程如上图,具体解释如下:
- 作者首先筛选出关键帧,在关键帧上用训练好的CNN网络[1]来预测单帧图深度值得到深度图,并以此深度图作为SLAM架构先验深度。同时在关键帧上用训练好的另一个CNN网络来做语义分割。
- 随后像直接法SLAM的一样做BA(Bundle Adjustment),用高斯牛顿法,基于pose graph方法优化得到pose,和普通的半稠密 SLAM过程基本一样。
- 将深度图和语义分割图融合进全局已有的场景深度图(实际上是三维地图点集合了)和三维语义分割图中
作者的主要贡献是提出一个不确定性传播框架,将新产生的深度融合进已有的场景深度中,并refine CNN网络得到的深度(融合和普通深度融合比较相似,但refine过程和《Semi-densevisualodom- etry for a monocular camera》相似)。
此过程中,每个关键帧带一个深度图,一个(深度)不确定图(之所以称为图是因为不确定值与深度图的每个值一一对应),一个pose。不确定图是由当前关键帧的和最近邻
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1167
1167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









