






基于五次多项式的路径跟踪控制算法
适应无人驾驶路径跟踪,自动泊车路径跟踪
可输出横向偏差图,质心侧偏角等图
仅供学习算法使用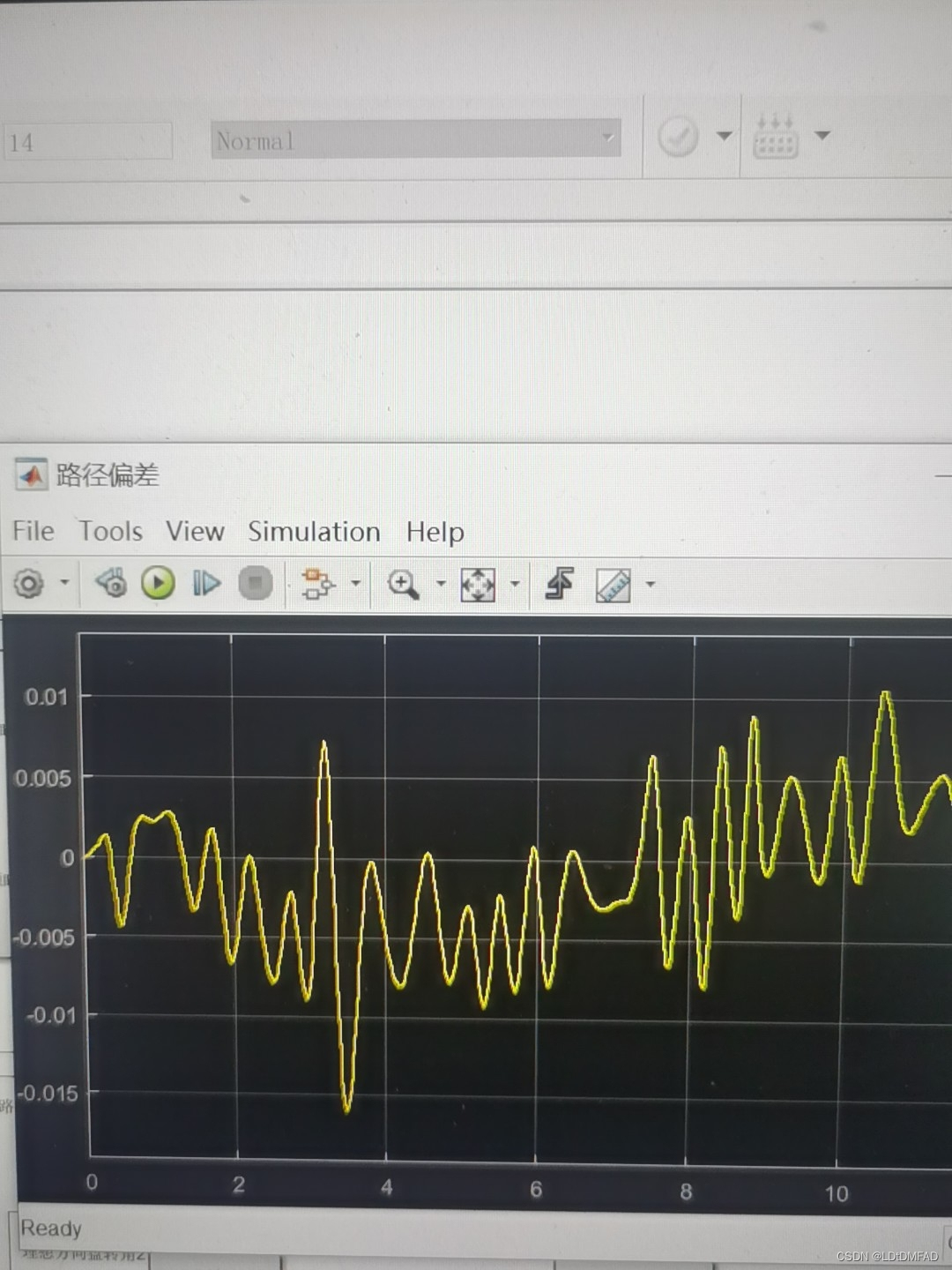

本文围绕基于五次多项式的路径跟踪控制算法展开,探讨其在无人驾驶路径跟踪和自动泊车路径跟踪等领域的应用。该算法通过对车辆路径进行建模,将路径跟踪控制问题转化为多项式方程求解问题,从而实现精准路径跟踪。
该算法的核心思想是通过构造五次多项式方程来描述车辆的运动轨迹,然后对该方程进行求解,得到车辆在任意时刻的位置、速度和加速度等参数,从而实现路径跟踪控制。在实际应用中,该算法表现出了较高的精度和稳定性,具有较强的适应性和可扩展性。
该算法主要用于无人驾驶路径跟踪和自动泊车路径跟踪等场景,可以输出横向偏差图、质心侧偏角等图,有助于对车辆行驶状态的监测和控制。同时,基于该算法的路径跟踪控制系统可以实现自动驾驶和自动泊车等功能,可以极大地提高驾驶的安全性和可靠性,具有非常广阔的应用前景。
需要注意的是,该算法仅供学习使用,不可用于实际驾驶中。在实际应用中,需要根据具体情况进行适当的修改和调整,以保证算法的准确性和可靠性。同时还需要注意在算法优化和效率提升方面的工作,以更好地满足实际需求。
相关代码,程序地址:http://lanzouw.top/672860337863.html















 6803
6803











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









