









 本文详细介绍了三菱PLC如何与伺服通过CC-LinkIEFieldNetwork进行通讯,包括理论知识、硬件分配、GXWORKS软件配置以及伺服状态控制字和状态显示字的使用。还涉及TCP/UDP通讯方式和不同控制模式下的参数设置。
本文详细介绍了三菱PLC如何与伺服通过CC-LinkIEFieldNetwork进行通讯,包括理论知识、硬件分配、GXWORKS软件配置以及伺服状态控制字和状态显示字的使用。还涉及TCP/UDP通讯方式和不同控制模式下的参数设置。
工作:三菱PLC与伺服之CC-Link IE Field Network通讯应用
一、理论
1. 简介+连接
CC-LINK-IE通讯分别有 CC-Link IE TSN,CC-Link IE Control Network,CC-Link IE Field Network,CC-Link IE Field Network Basic几种形式,其为现场总线网络,基于以太网网络通讯,使用网线连接,目前只接触过CC-Link IE Field Network Basic,看CC-LINK协会官网介绍,它们前三者都是在CC-Link IE Field Network Basic上做了升级,基本一样用法,CC-LINK-IE连接示意图如下

- CC-Link IE 示意图 ,图片源于官网
2. 控制容量规格
CC-Link IE Field Network规格

图片源自—CC-LINK协会官网
更多资料查看-CC-LINK协会官网

二、硬件网口分配与GX WORKS软件通讯配置
当PLC上分配有很多ROBOT、MR-JE伺服、触摸屏设备时,为了更好利用硬件,分配通讯负担,会将走TCP SLMP的触摸屏放置在拓展的(RJ71EN71模块)网口上,当设备比较少时,可以全部分配在PLC CPU的网口上
以下以使用CC-LINK-IEF通讯的伺服驱动器为例作连接介绍
1. 配置总图介绍

(1) 步骤4设置介绍


(2) 步骤4.cc-link-ief.网络配置设置(即总图步骤5)
这里是放置cc-link-ief设备,把MR-JET-G从右侧拖出来后,把分配好的IP设置上


(3) 步骤4.cc-link-ief.刷新设置

注意避开CC-LINK的映射IO段,配置好后,程序应用要和这里对应上,不要用错映射IO、映射字


使用过程中更改硬件的设置,如增加一个设备端口 ,要重启或Reset PLC ,新增设备端口才可使用

三、客户端与服务器
1. TCP/UDP/Melsoft/OPS对象设备连接
使用TCP Socket 、TCP Active、TCP Unpassive、TCP FallPassive、TCP SLMP、UDP Socket、UDP SLMP、OPS通讯、Melsoft通讯、ModbusTCP的设备位于“二、配置总图.步骤4.对象连接设备设置”里可以配置,和上面拖JET-G一样,将对应设备拖出来配置即可

- 对象设备连接配置图
下面为TCP服务器与客户端区别:
Active、Unpassive、Fallpassive、
服务器不会主动打开端口,它是开放好端口等着其他设备来打开,只有客户端主动去打开端口
比如主机开放给机器人端口为6000(如上图),机器人作为客户端用6000端口号进行连接)
UNPASSIVE:不主动打开端口,其为服务器sever(主机),自己PLC的端口号6000给机器人用来连接,后面KEEPACTIVE是保持连接。

ACTIVE是打开端口之意,那就是设置此Active设置的本身为客户端client(从机),主动打开外面服务器端口进行连接,比如以上的NO.16设备,PLC作为客户端client主动去打开应用Port 9004的设备

应用TCP SOCKET(ACTIVE、UNPASSIVE)这类要开关端口的TCP通讯时,TCP FB块里连接通道的K几上面要对应对象设备连接配置图的NO.几,否则应用不当无法通讯上





- 对应对象设备连接配置图的蓝色行,行“2”
总之,知道设备通讯方式,我们将其配好IP和端口号这样TCP设备就可以相互通讯了
四、 三菱伺服MR-JE-(…)的CC link IEF状态控制字与状态显示字


图片源自MR-JE-_C伺服放大器技术资料集(CC-Link IE现场网络Basic篇),手册编号SH(NA)-030262
直接控制PDO的方法,最主要的是理解 控制字与监控字,这两个非常关键
这个协议的控制是通过CIA 402 控制的; 很多协议都基于这个控制的;例如ECAT CANOPEN 都是控制CIA 402字典; 这个字典里面一般分为三个区域的数据 分别为:
1000-1FFF 这个一般不用控制;
2000-2FFF 这个属于SDO参数,一般用的比较多,根据不同的情况修改参数;
6000-60FF 这个属于PDO参数 ,是控制伺服最关键的参数,即上图遇映射字的Index索引号;

1. RWwn0/RWrn0: 控制模式设定(索引号6060)与控制模式显示(索引号6061)

(1) RWwn0:控制模式设定(索引号6060)
赋不同的值就能去切换不同的模式,注意这句话


(2) RWrn0: 控制模式显示(索引号6061)

2. RWwn01/RWrn02: 控制指令设定(索引号6040)与控制指令显示(索引号6041)


(1) RWwn01 :控制指令设定(索引号6040)



帮助理解的表格–汇川表格:

对索引号6040的字的Bit位进行控制即可实现对应功能,当然,是Bit位组合控制,单单一个Bit位可能要组合另一个Bit位一起使用。一般是0-3Bit位为ON及Bit 8 = ON(Halt:停止指令,0=可以运行,1=令伺服根据605DH的故障代码进行停止)且无故障发生方可运动起来。在这个三菱伺服里,Bit9-Bit14均未使用上,BIT15在点动时有用上。
另Bit4-Bit6是根据控制模式变化的
当使用(PP)轨迹位置模式(索引号6060H的RWwn0字设为1时)时,Bit4-Bit6功能如下,即0010时是绝对位置定位,0110为相对位置定位

当使用(PV)轨迹速度模式(索引号6060H的RWwn0字设为3时)时,Bit4-Bit6功能如下

注意这里的Bit15是控制JOG(轨迹速度)启动,设定H800F为JOG启动
当使用(TQ)转矩轨迹模式(索引号6060H的RWwn0字设为4时)时,Bit4-Bit6功能如下

(2) RWrn02:控制指令状态显示(索引号6041)

Bit12,Bit13 是根据不同模式改变的;
当使用(PP)轨迹位置模式(索引号6060H的RWwn0字设为1时)时,Bit12-Bit13功能如下
当使用(PV)轨迹速度模式(索引号6060H的RWwn0字设为3时)时,Bit12-Bit13功能如下

当使用(TQ)转矩轨迹模式(索引号6060H的RWwn0字设为4时)时,Bit12-Bit13功能如下

(3)速度设置 RWwn0C&RWwn1D(6081)

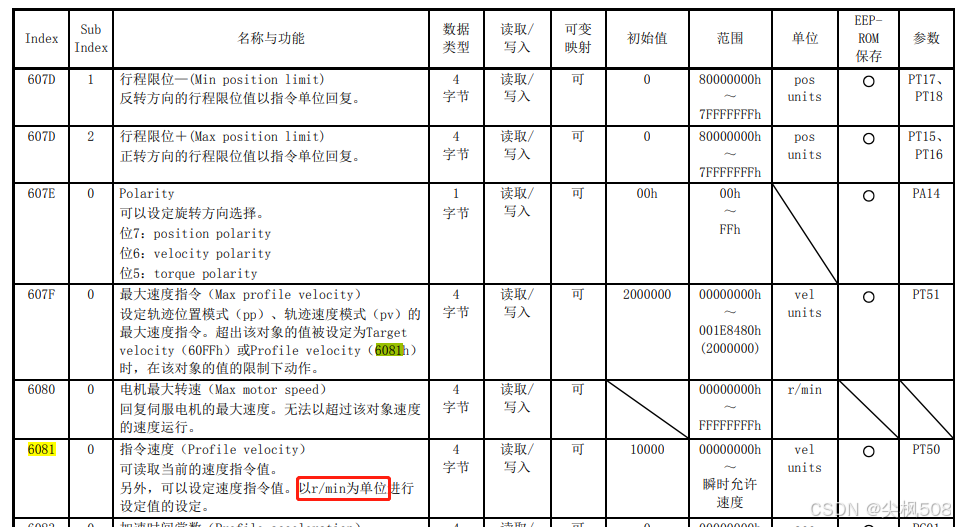
设定值的单位为R/MIN
(4) 其他控制字与状态字
查规格书

图片源自MR-JE-_C伺服放大器技术资料集(CC-Link IE现场网络Basic篇),手册编号SH(NA)-030261

图片源自MR-JE-_C伺服放大器技术资料集(轨迹模式篇),手册编号SH(NA)-030262
注:有的是双字,有的是单字,注意DMOV与MOV、EDMOV与EMOV使用
3. 控制轴连接、报警清除、状态监控、点动、设零、绝对/相对定位动作
假设(RYn0~RY(n + 3)F)映射到(B0-W3F)
假设(RXn0~RX(n + 3)F)映射到(B80-B0BF)
假设(RWrn00-RWrn1F)映射到(W0-W1F)
假设(RWwn00-RWwn1F)映射到(W40-W5F)
IO表

局部标签

(1)轴连接与转矩等参数预设
RWwn01(索引号6040)=w41:控制指令
通讯上后,将“使能+电压+急停使用+允许操作”置ON启用,即0000 1111=H0F,同时将转矩等参数设入,做好控制动作准备

OUT(TRUE,B0BF); //轴1通信连接请求
IF B3F=H1 THEN //轴1通讯成功
MOV(TRUE, K1000, W54); //轴1正转转矩限制
MOV(TRUE, K1000, W55); //轴1正转转矩限制
DMOV(TRUE, K100, W4E); //轴1加速时间
DMOV(TRUE, K100, W50); //轴1加速时间
MOVP(TRUE, H0F, W41); //轴1控制指令,通讯上,使能ON+电压加入+急停使用+允许操作=H0F
END_IF;
(2) 报警清除和轴停止动作
RWwn01(索引号6040)=w41:控制指令,清除报警指令:BIT7、停止控制:BIT8

OUT(复位按钮 AND W2.3 ,W41.7); //当有报警,按下清报警按钮,通知伺服清除报警
OUT(暂停按钮 ,W41.8); //按下清报警按钮,通知伺服控制电机停止动作
(3) 状态监视

DMOV(TRUE , W3 ,D100); //轴1当前坐标值显示使用
DMOV(TRUE, W5, D102); //轴1当前速度值显示使用
DMOV(TRUE, W0D, D104); //轴1当前报警编号显示使用
MOV(TRUE, W0,D106); //轴1控制模式值显示使用
MOV(TRUE, W2, D107); //轴1控制指令值显示使用
(4) 点动
RWwn00(索引号6060)=W40:控制模式,JOG模式:H3
RWwn01(索引号6040)=w41:控制指令,JOG指令:W41=H800F


注意这里的Bit15是控制JOG(轨迹速度)启动,设定W41.F(6040) On(或DMOV H800F W41):JOG启动
速度方向控制JOG方向
OUT (正转按钮 AND W2.1 AND NOT 原点回归模式中 AND NOT 轨迹位置模式中 ,轨迹速度模式中); //伺服ON时,按下正转按钮,切换轴1轨迹速度模式
OUT (反转按钮 AND W2.1 AND NOT 原点回归模式中 AND NOT 轨迹位置模式中 ,轨迹速度模式中 ); //伺服ON时,按下反转按钮,切换轴1轨迹速度模式
MOV(轨迹速度模式中,H3, W40); //轴1控制模式切换为轨迹速度模式,H3即进行JOG模式
IF W0=H3 THEN //轴1控制模式进入为轨迹速度模式H3,则
DMOV(正转按钮 AND NOT 反转按钮 ,K10000 ,W47); //即进行JOG+
DMOV(反转按钮 AND NOT 正转按钮 ,K-10000 ,W47); //即进行JOG-
OUT( (正转按钮 AND NOT 反转按钮) OR (反转按钮 AND NOT 正转按钮 ) ,W41.F); //轴1控制模式切换轨迹速度模式后,控制电机动作。
END_IF;
(5) 设置零点
RWwn00(索引号6060)=W40:控制模式,回零模式H6
RWwn01(索引号6040)=w41:控制指令,回零MOVP H0F W41

MOV(回零按钮 AND NOT 轨迹位置模式中 AND W2.1,H6 ,W40); //切换为回零模式,H6即回零模式;
MOVP(回零按钮 AND NOT 轨迹位置模式中 AND W2.1, H0F ,W41); //轴1控制指令H0F,进行运作准备
IF W0=H0F THEN //成功切换为回零模式
MOVP(TRUE,H1F ,W41); //进行回零运作信号
SET(W2.1,轴1正在回零中 ); //进行回零运作
MOVP(W2.C AND 轴1正在回零中,H0F,W41); //回零完成
RST(W2.C AND 轴1正在回零中,轴1正在回零中); //回零完成
RST(W2.C AND 轴1正在回零中,回零按钮); //回零完成
END_IF;
(6)绝对定位与相对定位启动
RWwn00(索引号6060)=W40:控制模式,轨迹位置模式(pp):H1
RWwn01(索引号6040)=w41:控制指令,绝对定位MOVP H2F W41,相对定位MOVP H6F W41

SET(轨迹位置模式切换按钮 AND NOT 轨迹速度模式中 AND NOT 原点回归模式中 AND NOT 转矩模式中 AND 轴1已回零 AND W2.1 ,轨迹位置模式中);//人为切换为轨迹位置模式
RST(轨迹位置模式切换按钮 AND NOT 轨迹速度模式中 AND NOT 原点回归模式中 AND NOT 转矩模式中 AND W2.1 ,轨迹位置模式中);//人为切换要在已回零前提下
IF 轨迹位置模式中=H1 THEN //轨迹位置模式条件合理,进入成功
DMOV(TRUE, K5000, W45); //假设定位值为K5000
DMOV(TRUE, K500, W45); //假设速度值为K500
MOVP(相对定位启动按钮 AND NOT 绝对定位启动按钮 ,H6F, W41); //相对定位启动则赋相对定位代号值H6F
MOVP(绝对定位启动按钮 AND NOT 相对定位启动按钮 ,H2F, W41); //绝对定位启动则赋相对定位代号值H2F
MOVP((相对定位启动按钮 AND NOT 绝对定位启动按钮 ) OR (绝对定位启动按钮 AND NOT 相对定位启动按钮), H1, W40); //轨迹位置模式为H1
IF W0=H1 THEN
MOVP(相对定位启动按钮 , H7F, W41); //相对定位启动运作
MOVP(绝对定位启动按钮 , H3F, W41); //绝对定位启动运作
RST(W2.C, W41.4); //回零已经完成的,获取新的定位参数取消
MOVP(LDP(TRUE,W2.A) ,H0F ,W41); //动作到位
RST(LDP(TRUE,W2.A), 轨迹位置模式切换按钮); //动作到位
END_IF;
END_IF;
4.监控
当伺服报警或者其他伺服控制器问题,可以通过GX WORKS程序或者MR Configuration软件查里面的寄存器地址状态
假设CC-LINK-IE分配
RX3F循环通信准备完成,PLC读
RY3F循环通信准备指令,PLC写

如下:

/**************************************************/
RWr是PLC读的,这个是伺服的状态寄存器


RWw是PLC写的,这个是伺服的控制寄存器


N是轴编号:H1F=K32,故轴号X32,用以换算下一个控制器的控制寄存器编号分配

如何监控CC-LINK-IE

顺便这里记录下像RD77MS16使用光纤通讯的,其直接使用缓存存储器的,缓存存储器的监控方法





















 888
888

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











