






- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍖 原作者:K同学啊 | 接辅导、项目定制
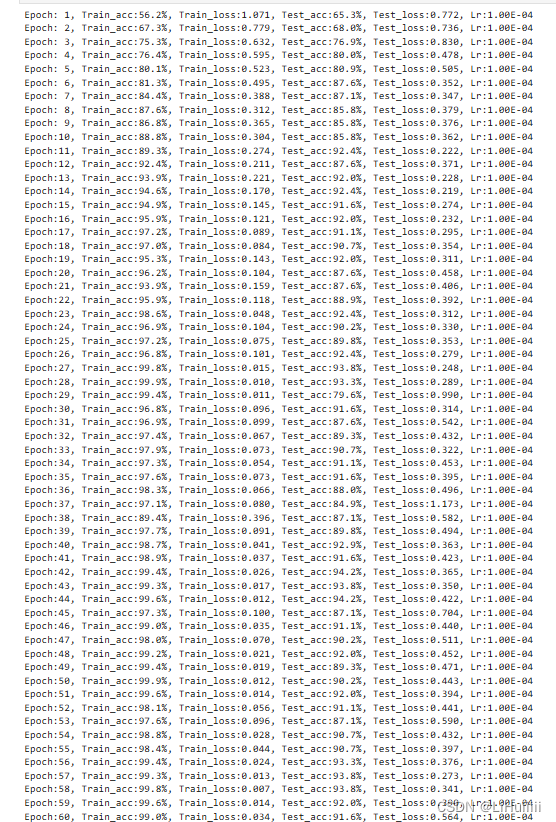
import torch import torch.nn as nn import torchvision.transforms as tranforms import torchvision from torchvision import transforms,datasets import os,PIL,pathlib,warnings warnings.filterwarnings("ignore") device=torch.device("cuda" if torch.cuda.is_available() else "cpu") device import os,PIL,random,pathlib data_dir='./9-data/' data_dir=pathlib.Path(data_dir) data_paths=list(data_dir.glob('*')) classNames=[str(path).split("\\")[1] for path in data_paths] classNames # 关于transforms.Compose的更多介绍可以参考:https://blog.csdn.net/qq_38251616/article/details/124878863 train_transforms = transforms.Compose([ transforms.Resize([224, 224]), # 将输入图片resize成统一尺寸 # transforms.RandomHorizontalFlip(), # 随机水平翻转 transforms.ToTensor(), # 将PIL Image或numpy.ndarray转换为tensor,并归一化到[0,1]之间 transforms.Normalize( # 标准化处理-->转换为标准正太分布(高斯分布),使模型更容易收敛 mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) # 其中 mean=[0.485,0.456,0.406]与std=[0.229,0.224,0.225] 从数据集中随机抽样计算得到的。 ]) test_transform = transforms.Compose([ transforms.Resize([224, 224]), # 将输入图片resize成统一尺寸 transforms.ToTensor(), # 将PIL Image或numpy.ndarray转换为tensor,并归一化到[0,1]之间 transforms.Normalize( # 标准化处理-->转换为标准正太分布(高斯分布),使模型更容易收敛 mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) # 其中 mean=[0.485,0.456,0.406]与std=[0.229,0.224,0.225] 从数据集中随机抽样计算得到的。 ]) total_data = datasets.ImageFolder("./9-data/",transform=train_transforms) total_data total_data.class_to_idx train_size=int(0.8 * len(total_data)) test_size =len(total_data)-train_size train_dataset,test_dataset=torch.utils.data.random_split(total_data, [train_size, test_size]) train_dataset,test_dataset batch_size=4 train_dl=torch.utils.data.DataLoader(train_dataset,batch_size=batch_size,shuffle=True,num_workers=1) test_dl=torch.utils.data.DataLoader(test_dataset,batch_size=batch_size,shuffle=True,num_workers=1) for X,y in test_dl: print("shape of X[N,C,H,W]:",X.shape) print("shape of y",y.shape,y.dtype) break import torch.nn.functional as F def autopad(k,p=None): if p is None: p=k//2 if isinstance(k,int) else [x // 2 for x in k] return p class Conv(nn.Module): def __init__(self,c1,c2,k=1,s=1,p=None,g=1,act=True): super().__init__() self.conv=nn.Conv2d(c1,c2,k,s,autopad(k,p),groups=g,bias=False) self.bn=nn.BatchNorm2d(c2) self.act=nn.SiLU() if act is True else (act if isinstance(act,nn.moudle) else nn.Identity()) def forward(self,x): return self.act(self.bn(self.conv(x))) class Bottleneck(nn.Module): def __init__(self,c1,c2,shortcut=True,g=1,e=0.5): super().__init__() c_=int(c2*e) self.cv1=Conv(c1,c_,1,1) self.cv2=Conv(c_,c2,3,1,g=g) self.add=shortcut and c1==c2 def forward(self,x): return x+self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x)) class C3(nn.Module): def __init__(self,c1,c2,n=1,shortcut=True,g=1,e=0.5): super().__init__() c_=int(c2*e) self.cv1=Conv(c1,c_,1,1) self.cv2=Conv(c1,c_,1,1) self.cv3=Conv(2*c_,c2,1) self.m=nn.Sequential(*(Bottleneck(c_,c_,shortcut,g,e=1.0) for _ in range(n))) def forward(self,x): return self.cv3(torch.cat((self.m(self.cv1(x)),self.cv2(x)),dim=1)) class SPPF(nn.Module): def __init__(self,c1,c2,k=5): super().__init__() c_=c1//2 self.cv1=Conv(c1,c_,1,1) self.cv2=Conv(c_*4,c2,1,1) self.m=nn.MaxPool2d(kernel_size=k,stride=1,padding=k//2) def forward(self,x): x=self.cv1(x) with warnings.catch_warnings(): warnings.simplefilter('ignore') y1=self.m(x) y2=self.m(y1) return self.cv2(torch.cat([x,y1,y2,self.m(y2)],1)) class YOLOv5_backbone(nn.Module): def __init__(self): super(YOLOv5_backbone, self).__init__() self.Conv_1 = Conv(3, 64, 3, 2, 2) self.Conv_2 = Conv(64, 128, 3, 2) self.C3_3 = C3(128,128) self.Conv_4 = Conv(128, 256, 3, 2) self.C3_5 = C3(256,256) self.Conv_6 = Conv(256, 512, 3, 2) self.C3_7 = C3(512,512) self.Conv_8 = Conv(512, 1024, 3, 2) self.C3_9 = C3(1024, 1024) self.SPPF = SPPF(1024, 1024, 5) # 全连接网络层,用于分类 self.classifier = nn.Sequential( nn.Linear(in_features=65536, out_features=100), nn.ReLU(), nn.Linear(in_features=100, out_features=4) ) def forward(self, x): x = self.Conv_1(x) x = self.Conv_2(x) x = self.C3_3(x) x = self.Conv_4(x) x = self.C3_5(x) x = self.Conv_6(x) x = self.C3_7(x) x = self.Conv_8(x) x = self.C3_9(x) x = self.SPPF(x) x = torch.flatten(x, start_dim=1) x = self.classifier(x) return x device = "cuda" if torch.cuda.is_available() else "cpu" print("Using {} device".format(device)) model = YOLOv5_backbone().to(device) model # 统计模型参数量以及其他指标 import torchsummary as summary summary.summary(model, (3, 224, 224)) def train(dataloader,model,loss_fn,optimizer): size=len(dataloader.dataset) num_batches=len(dataloader) train_loss,train_acc=0,0 for X,y in dataloader: X,y = X.to(device),y.to(device) pred=model(X) loss=loss_fn(pred,y) optimizer.zero_grad() loss.backward() optimizer.step() train_acc+=(pred.argmax(1)==y).type(torch.float).sum().item() train_loss+=loss.item() train_acc /=size train_loss /=num_batches return train_acc,train_loss def test (dataloader, model, loss_fn): size = len(dataloader.dataset) # 测试集的大小 num_batches = len(dataloader) # 批次数目, (size/batch_size,向上取整) test_loss, test_acc = 0, 0 # 当不进行训练时,停止梯度更新,节省计算内存消耗 with torch.no_grad(): for imgs, target in dataloader: imgs, target = imgs.to(device), target.to(device) # 计算loss target_pred = model(imgs) loss = loss_fn(target_pred, target) test_loss += loss.item() test_acc += (target_pred.argmax(1) == target).type(torch.float).sum().item() test_acc /= size test_loss /= num_batches return test_acc, test_loss import copy optimizer = torch.optim.Adam(model.parameters(), lr= 1e-4) loss_fn = nn.CrossEntropyLoss() # 创建损失函数 epochs = 60 train_loss = [] train_acc = [] test_loss = [] test_acc = [] best_acc = 0 # 设置一个最佳准确率,作为最佳模型的判别指标 for epoch in range(epochs): model.train() epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, optimizer) model.eval() epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn) # 保存最佳模型到 best_model if epoch_test_acc > best_acc: best_acc = epoch_test_acc best_model = copy.deepcopy(model) train_acc.append(epoch_train_acc) train_loss.append(epoch_train_loss) test_acc.append(epoch_test_acc) test_loss.append(epoch_test_loss) # 获取当前的学习率 lr = optimizer.state_dict()['param_groups'][0]['lr'] template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}%, Test_loss:{:.3f}, Lr:{:.2E}') print(template.format(epoch+1, epoch_train_acc*100, epoch_train_loss, epoch_test_acc*100, epoch_test_loss, lr)) # 保存最佳模型到文件中 PATH = './best_model.pth' # 保存的参数文件名 torch.save(best_model.state_dict(), PATH) print('Done') import matplotlib.pyplot as plt #隐藏警告 import warnings warnings.filterwarnings("ignore") #忽略警告信息 plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签 plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号 plt.rcParams['figure.dpi'] = 100 #分辨率 epochs_range = range(epochs) plt.figure(figsize=(12, 3)) plt.subplot(1, 2, 1) plt.plot(epochs_range, train_acc, label='Training Accuracy') plt.plot(epochs_range, test_acc, label='Test Accuracy') plt.legend(loc='lower right') plt.title('Training and Validation Accuracy') plt.subplot(1, 2, 2) plt.plot(epochs_range, train_loss, label='Training Loss') plt.plot(epochs_range, test_loss, label='Test Loss') plt.legend(loc='upper right') plt.title('Training and Validation Loss') plt.show() # 将参数加载到model当中 best_model.load_state_dict(torch.load(PATH, map_location=device)) epoch_test_acc, epoch_test_loss = test(test_dl, best_model, loss_fn) epoch_test_acc, epoch_test_loss

总结:现在已经有点感觉框架能基本自己敲出来,继续加油















 7116
7116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









