







文章目录
前言
目标检测中的特征融合技术。
一、一些特征融合方式
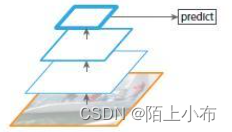
传统特征:像SPP net,Fast RCNN,Faster
RCNN是采用这种方式,即仅采用网络最后一层的特征。
图像金字塔:将原图片做成不同的尺寸,再进行特征提取,进行检测。可以在检测的时候尝试。

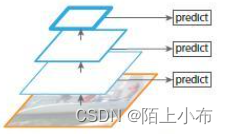
多尺度特征融合:像SSD(Single Shot Detector)采用这种多尺度特征融合的方式,没有上采样过程,即从网络不同层抽取不同尺度的特征做预测,这种方式不会增加额外的计算量。
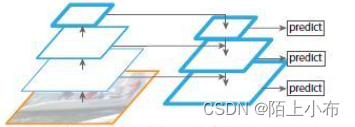
特征金字塔(FPN):顶层特征通过上采样和低层特征做融合,而且每层都是独立预测的。
二、特征融合分类
-
在深度学习的很多工作中(例如目标检测、图像分割),融合不同尺度的特征是提高性能的一个重要手段。低层特征分辨率更高,包含更多位置、细节信息,但是由于经过的卷积更少,其语义性更低,噪声更多。高层特征具有更强的语义信息,但是分辨率很低,对细节的感知能力较差。如何将两者高效融合,取其长处,弃之糟泊,是改善分割模型的关键。
-
很多工作通过融合多层来提升检测和分割的性能,按照融合与预测的先后顺序,分类为早融合(Early fusion)和晚融合(Late fusion)。
-
早融合(Early fusion): 先融合多层的特征,然后在融合后的特征上训练预测器**(只在完全融合之后,才统一进行检测)。这类方法也被称为skip connection,即采用concat、add操作**。这一思路的代表是Inside-Outside Net(ION)和HyperNet。两个经典的特征融合方法:
(1)concat:系列特征融合,直接将两个特征进行连接。两个输入特征x和y的维数若为p和q,输出特征z的维数为p+q;
(2)add:并行策略,将这两个特征向量组合成复向量,对于输入特征x和y,z = x + iy,其中i是虚数单位。 -
晚融合(Late fusion):通过结合不同层的检测结果改进检测性能**(尚未完成最终的融合之前,在部分融合的层上就开始进行检测,会有多层的检测,最终将多个检测结果进行融合)**。这一类研究思路的代表有两种:
(1)feature不融合,多尺度的feture分别进行预测,然后对预测结果进行综合,如Single Shot MultiBox Detector (SSD) , Multi-scale CNN(MS-CNN)
(2)feature进行金字塔融合,融合后进行预测,如Feature Pyramid Network(FPN)等。
三、晚融合方法归纳总结
1、Feature Pyramid Network(FPN)
-
FPN(Feature Pyramid Network)算法同时利用低层特征高分辨率和高层特征的高语义信息,通过融合这些不同层的特征达到预测的效果。并且预测是在每个融合后的特征层上单独进行的,这和常规的特征融合方式不同。
-
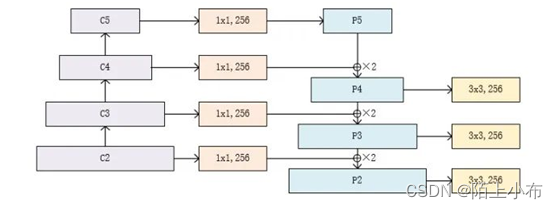
FPN将深层信息上采样,与浅层信息逐元素地相加,从而构建了尺寸不同的特征金字塔结构,性能优越,现已成为目标检测算法的一个标准组件。FPN的结构如下所示。
-
自下而上:最左侧为普通的卷积网络,默认使用ResNet结构,用作提取语义信息。C1代表了ResNet的前几个卷积与池化层,而C2至C5分别为不同的ResNet卷积组,这些卷积组包含了多个Bottleneck结构,组内的特征图大小相同,组间大小递减。
-
自上而下:首先对C5进行1×1卷积降低通道数得到P5,然后依次进行上采样得到P4、P3和P2,目的是得到与C4、C3与C2长宽相同的特征,以方便下一步进行逐元素相加。这里采用2倍最邻近上采样,即直接对临近元素进行复制,而非线性插值。
-
横向连接(Lateral Connection):目的是为了将上采样后的高语义特征与浅层的定位细节特征进行融合。高语义特征经过上采样后,其长宽与对应的浅层特征相同,而通道数固定为256,因此需要对底层特征C2至C4进行11卷积使得其通道数变为256,然后两者进行逐元素相加得到P4、P3与P2。由于C1的特征图尺寸较大且语义信息不足,因此没有把C1放到横向连接中。
-
卷积融合:在得到相加后的特征后,利用3×3卷积对生成的P2至P4再进行融合,目的是消除上采样过程带来的重叠效应,以生成最终的特征图。
-
FPN对于不同大小的RoI,使用不同的特征图,大尺度的RoI在深层的特征图上进行提取,如P5,小尺度的RoI在浅层的特征图上进行提取,如P2。FPN的代码实现如下:
import torch.nn as nn
import torch.nn.functional as F
import math
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_planes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.bottleneck = nn.Sequential(
nn.Conv2d(in_planes, planes, 1, bias=False),
nn.BatchNorm2d(planes),
nn.ReLU(inplace=True),
nn.Conv2d(planes, planes, 3, stride 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1274
1274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









