




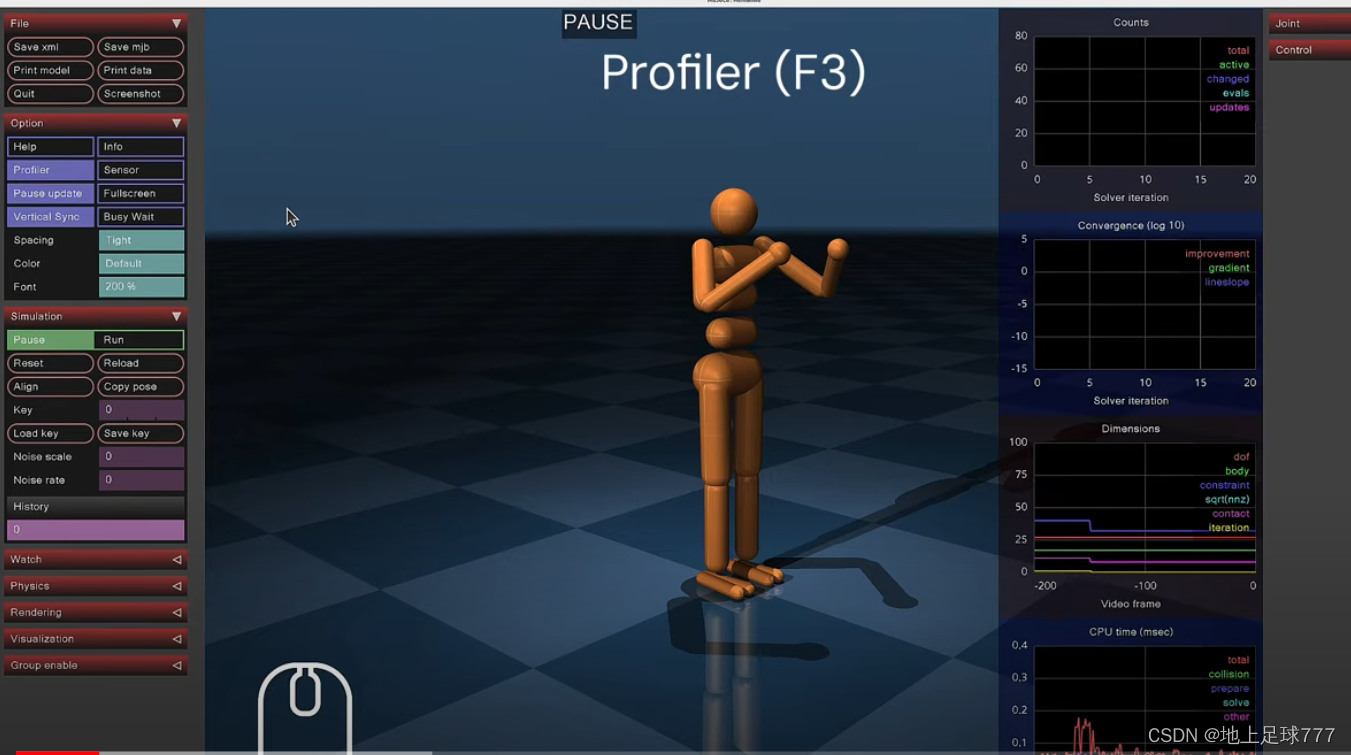
加载模型
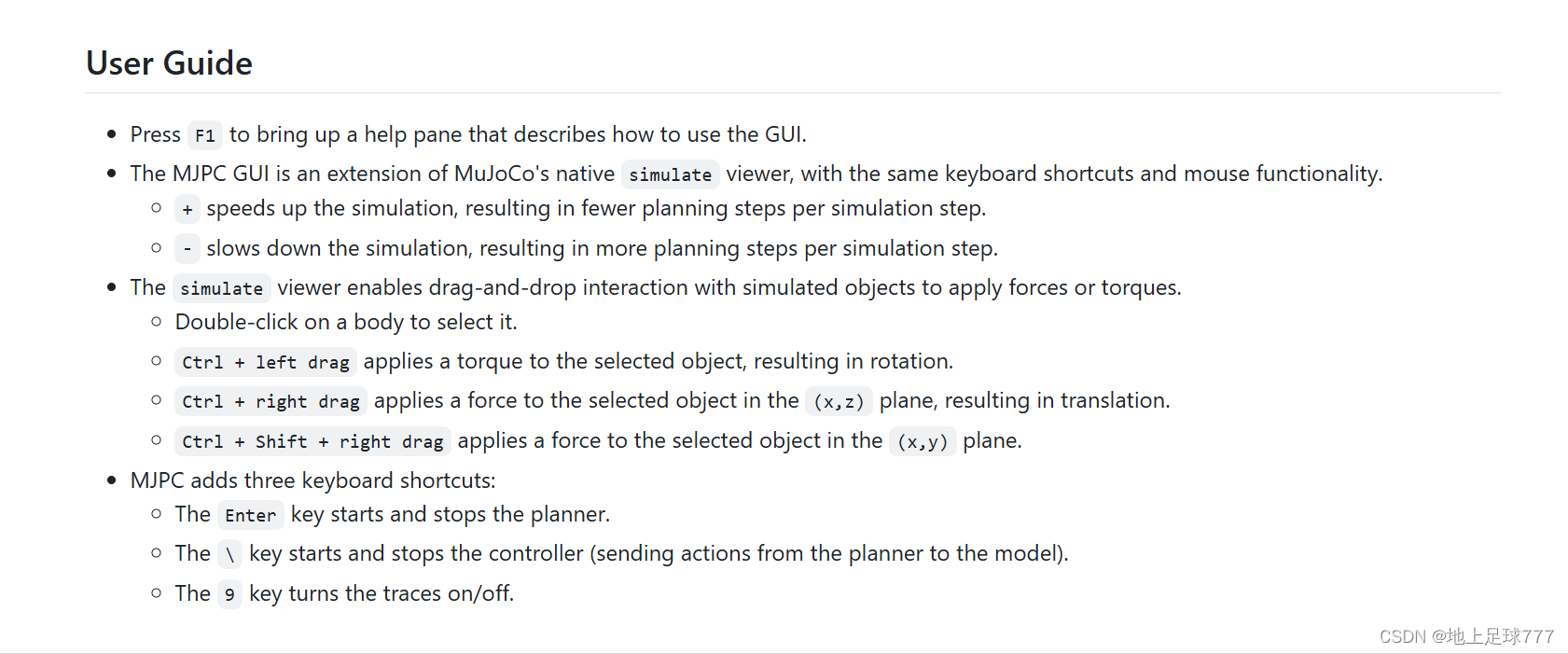
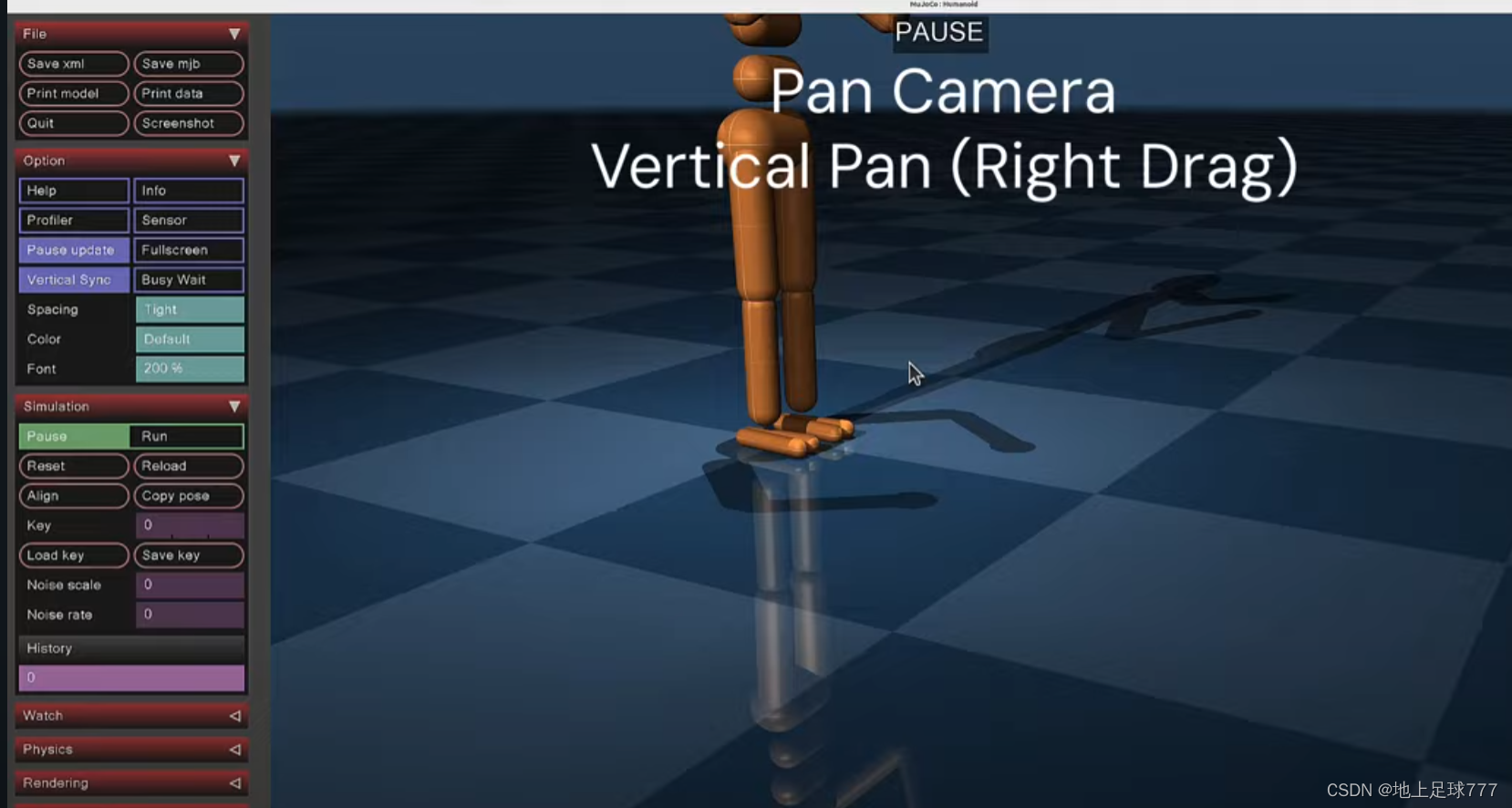
帮助面板 F1
字体大小调整 200% 300% Font
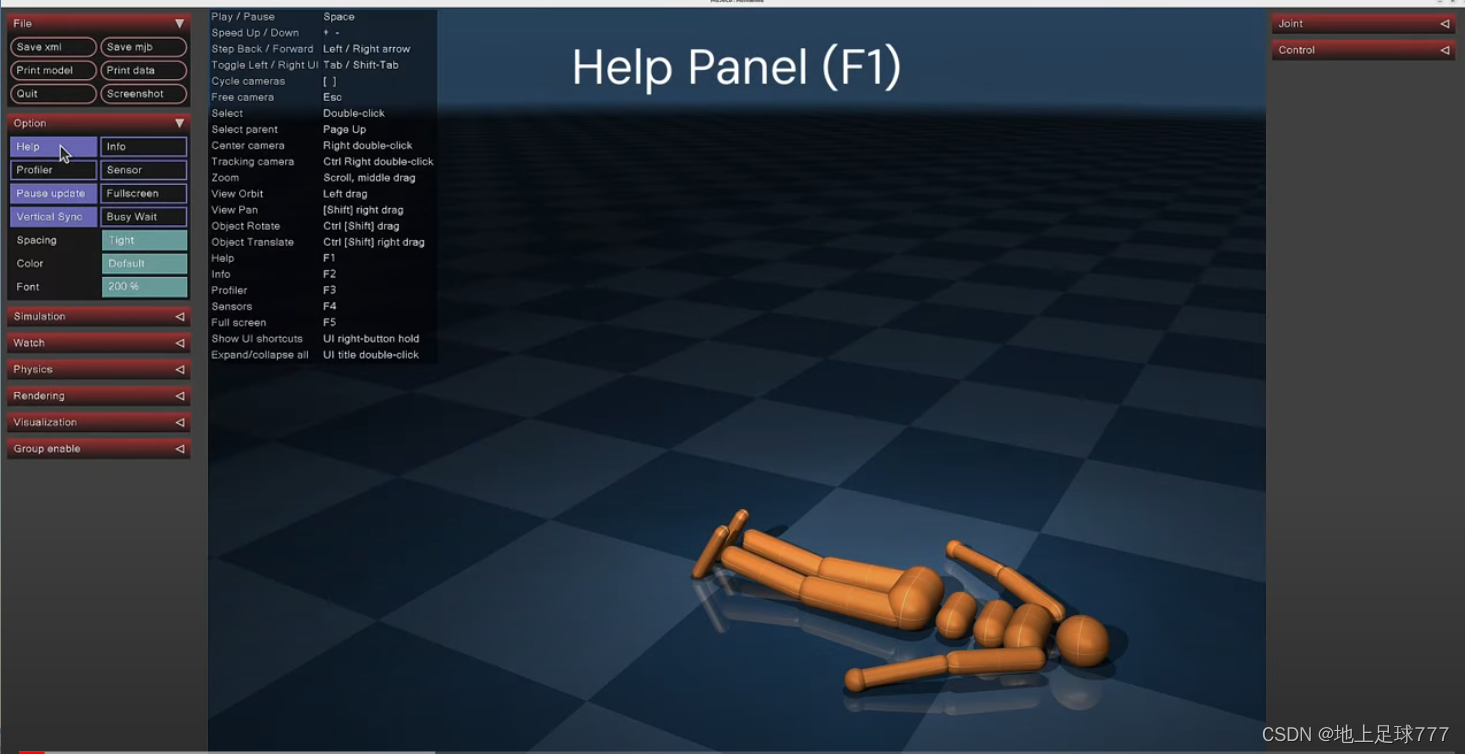
F2 F3

切换面板 隐藏或者显示 (左和右)
TAB是左面板

Reset 重置仿真 Backspace
重新加载模型
他这里是改了颜色
开始或者暂停 space
速度调整 + - 两个按键

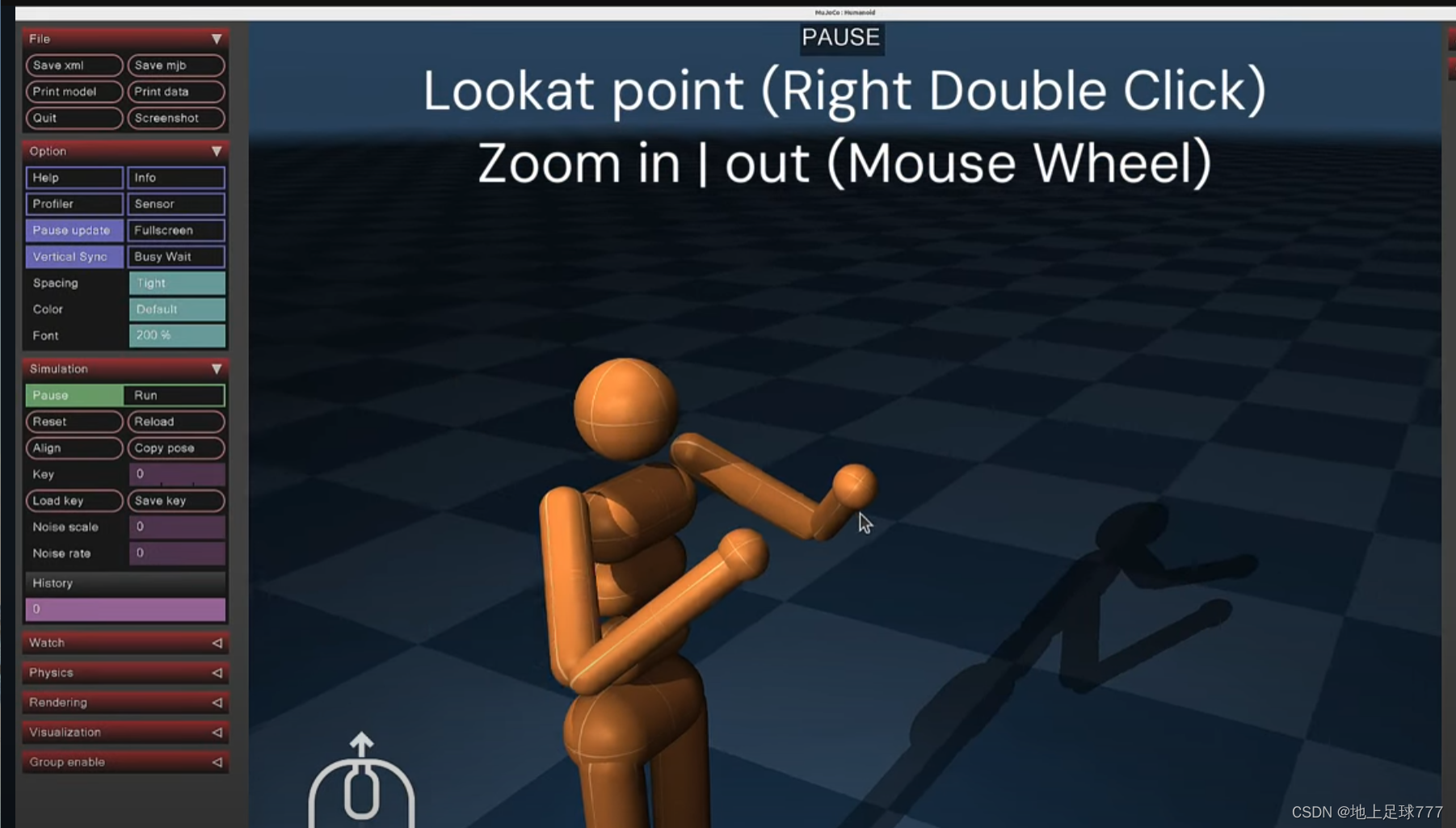
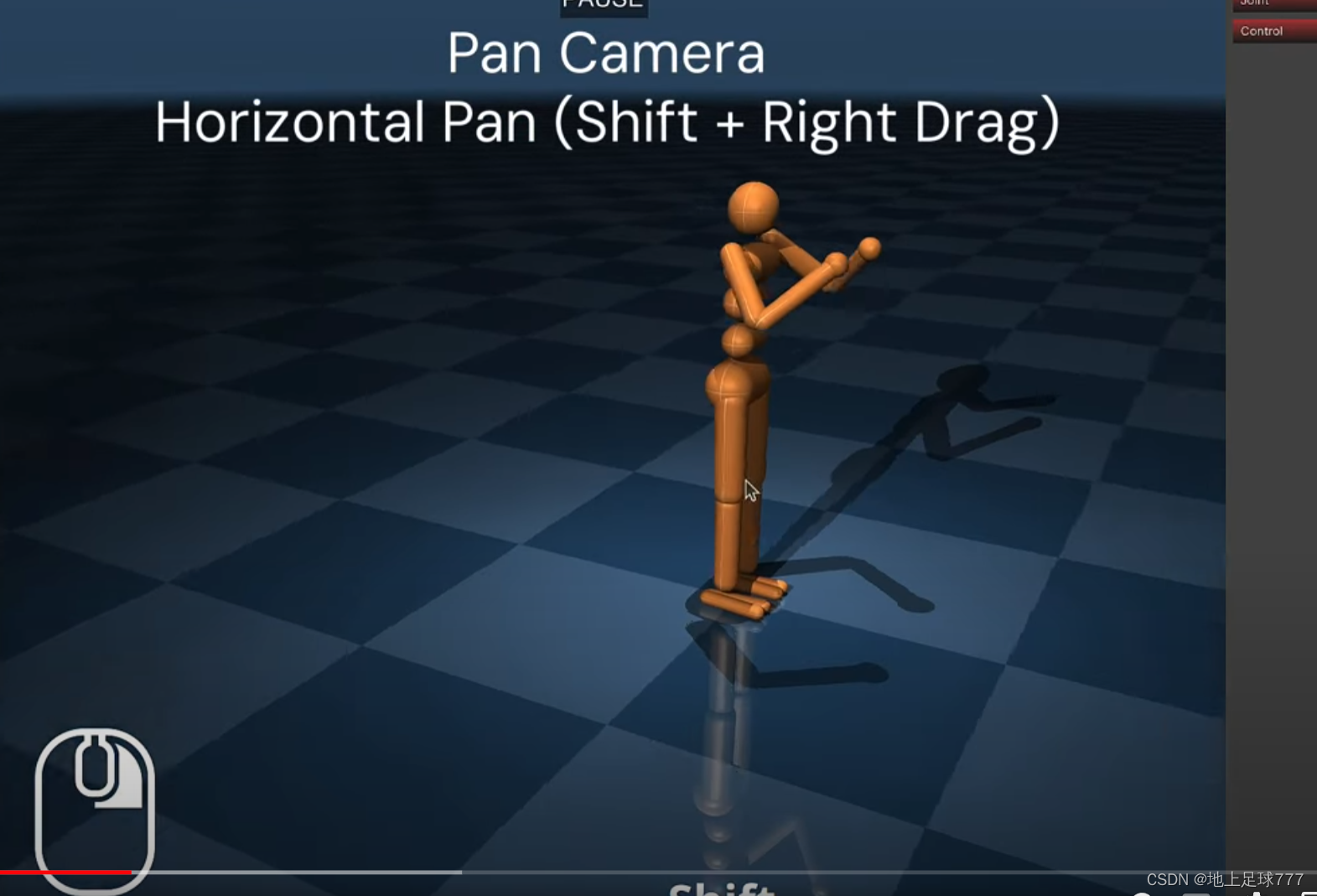
orbit 鼠标左键按住
平移 转换视角
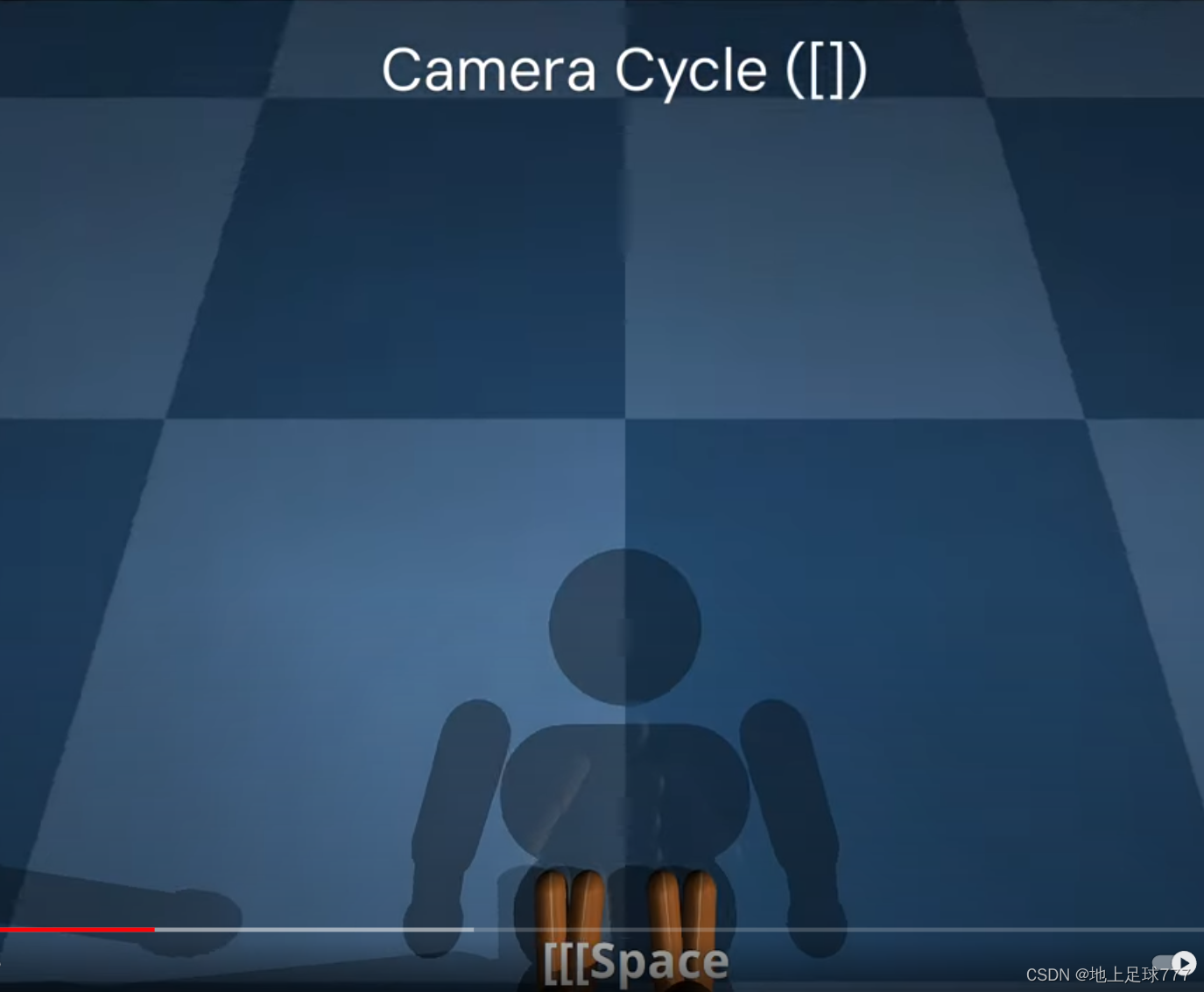
按键【】
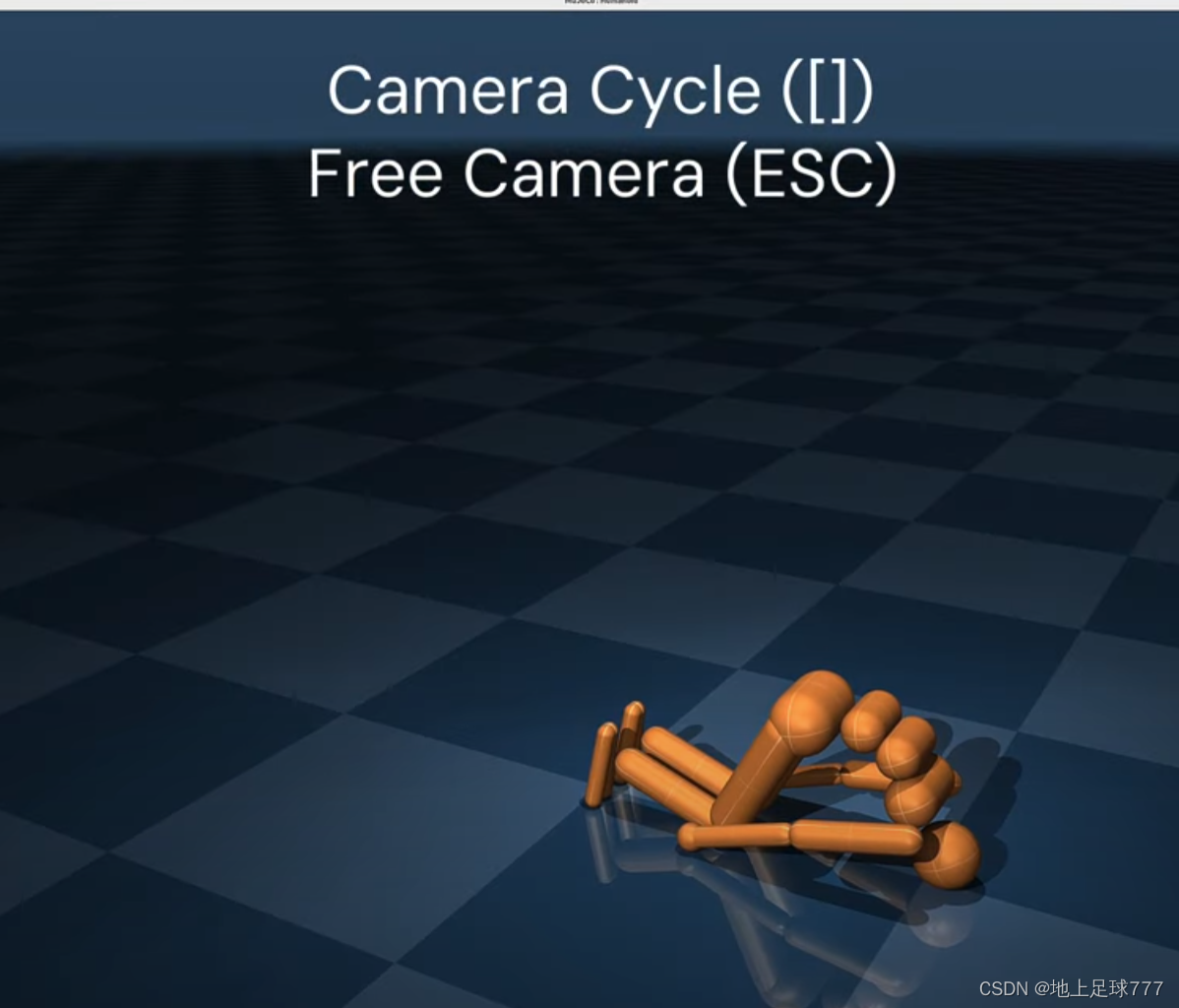
相机视角跟随
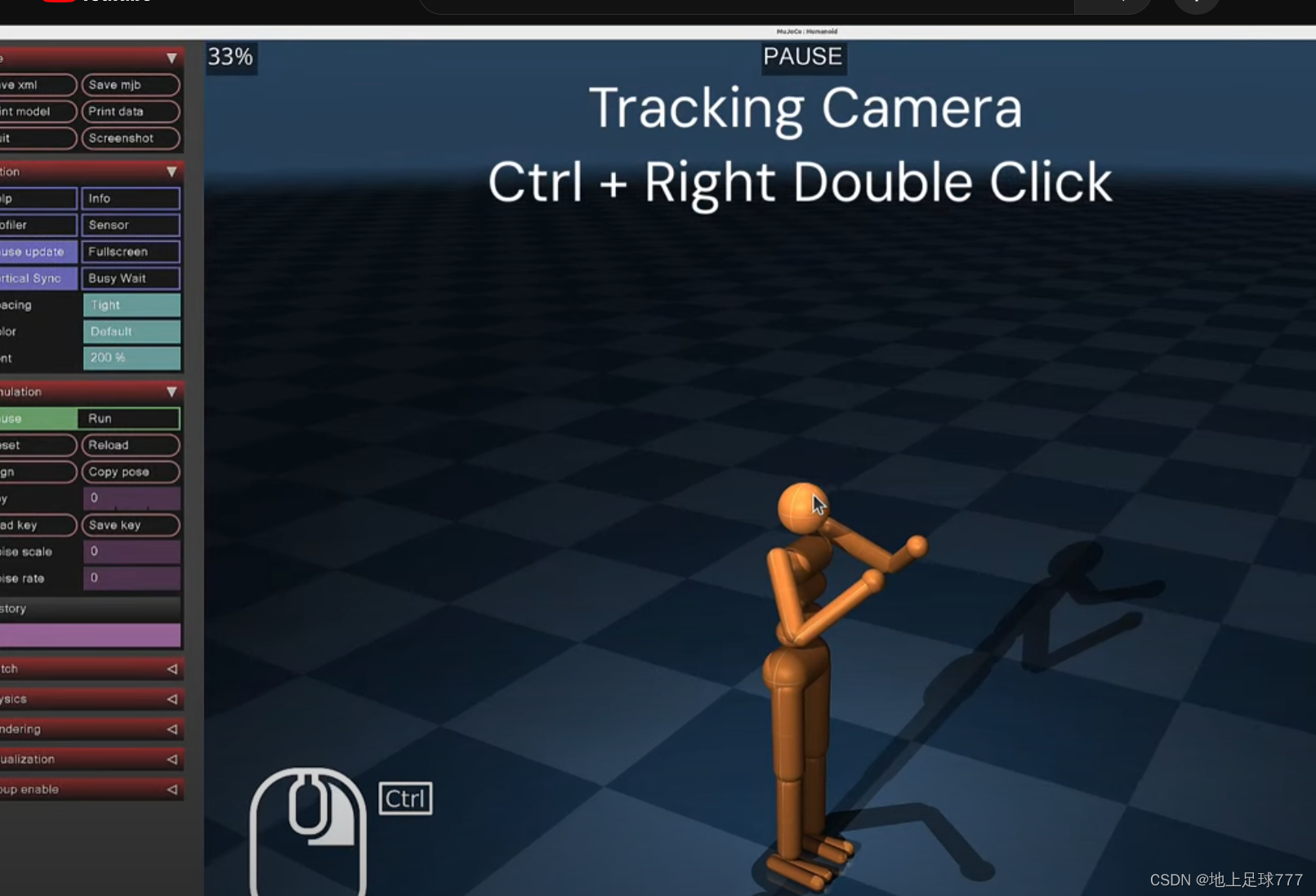
模型旋转 与移动
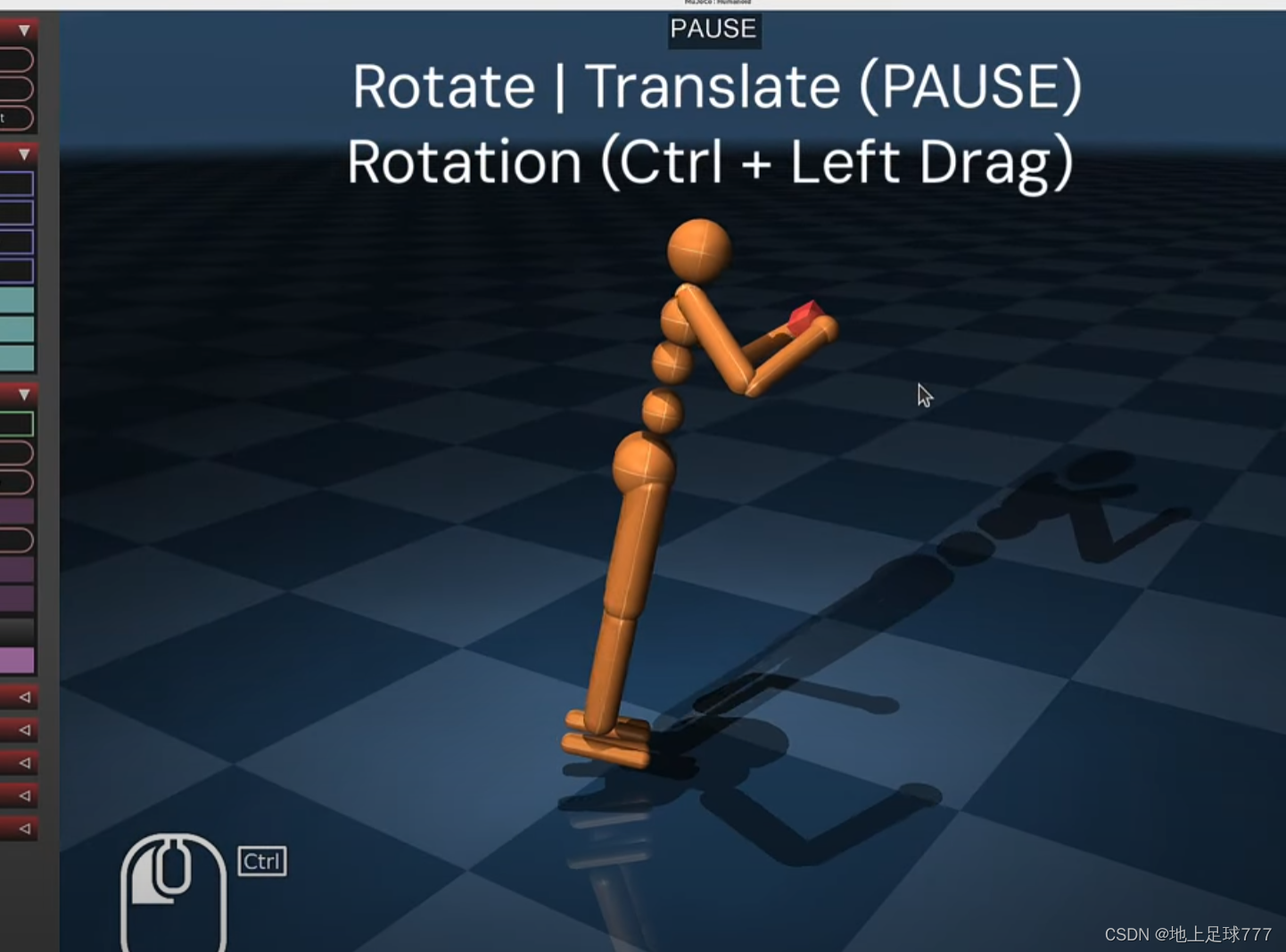
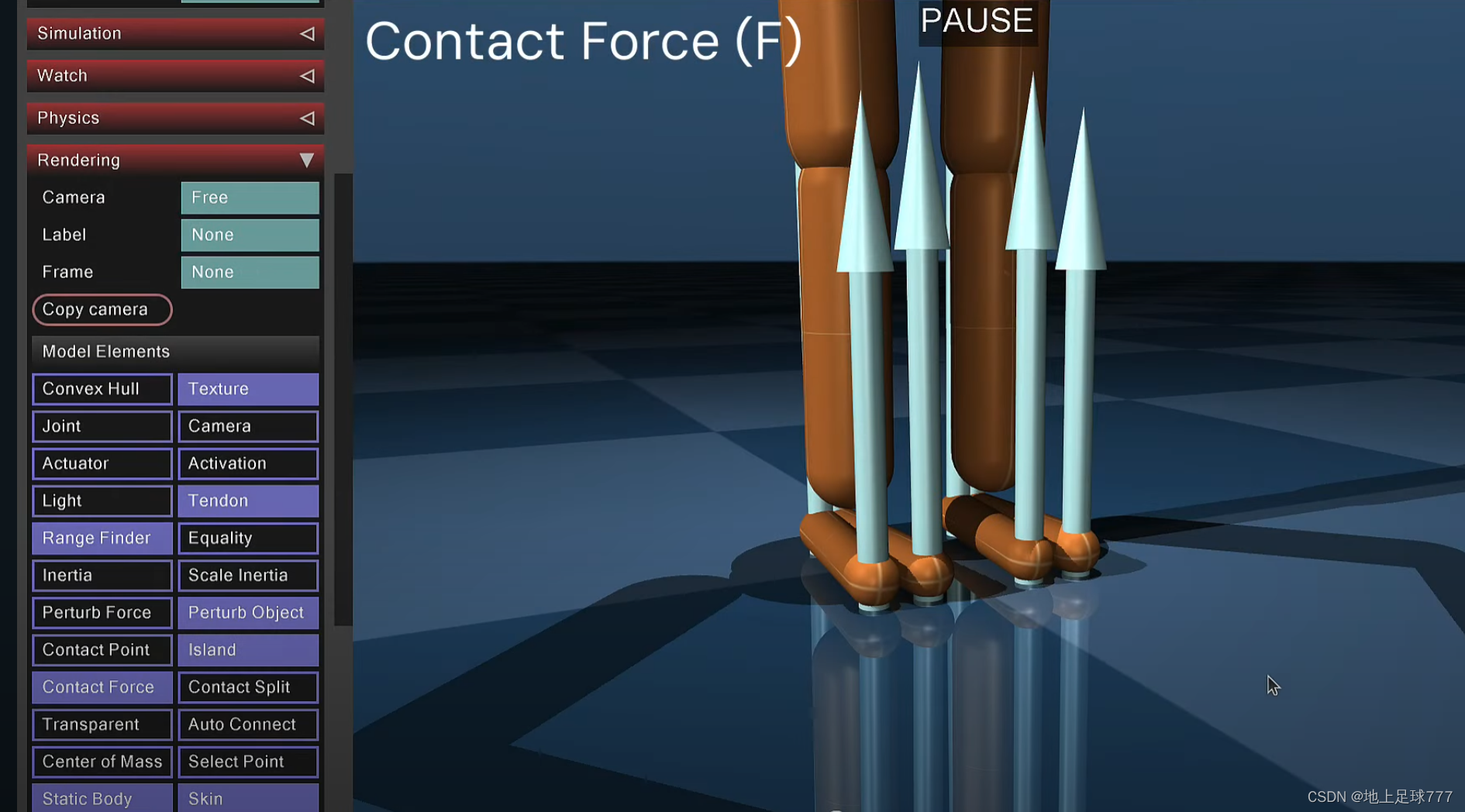
torque force

鼠标选择某个部位
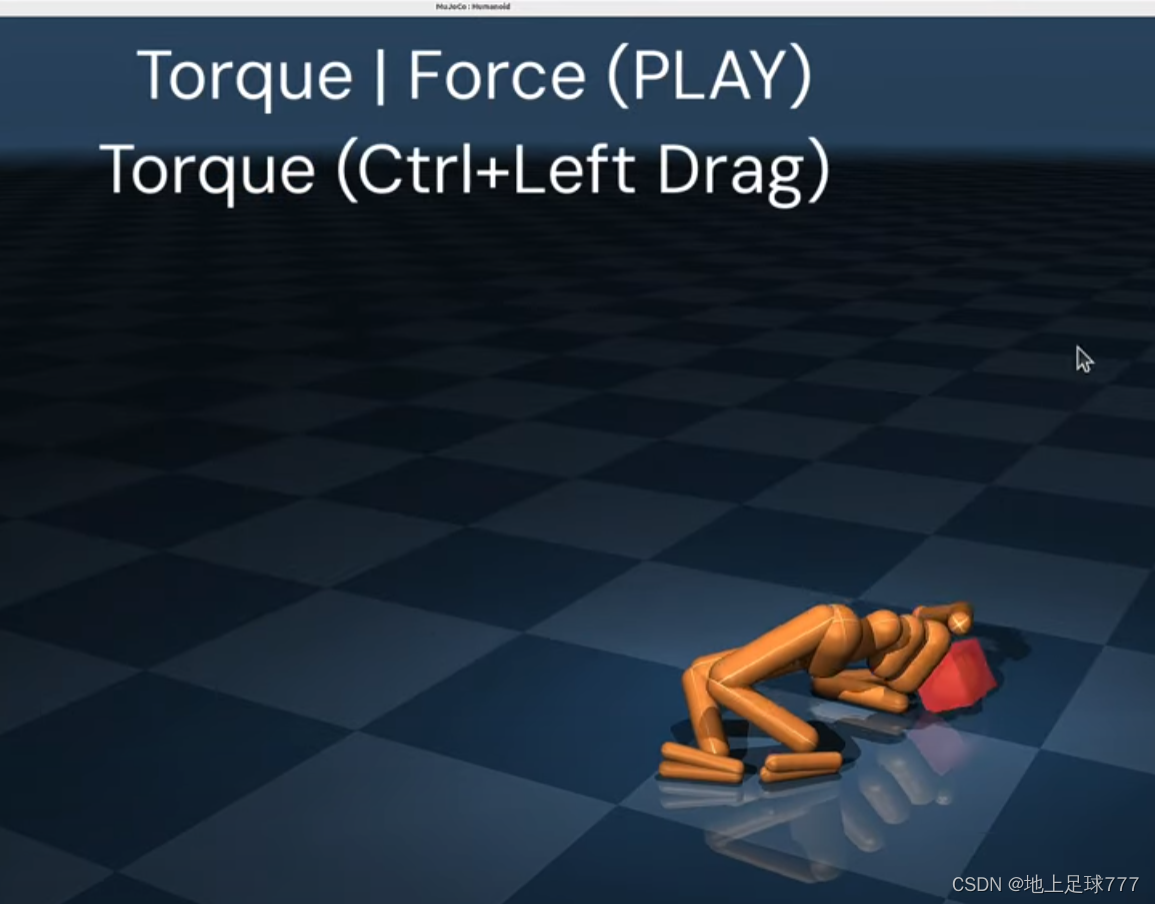
可以看到人在翻滚 扭矩力
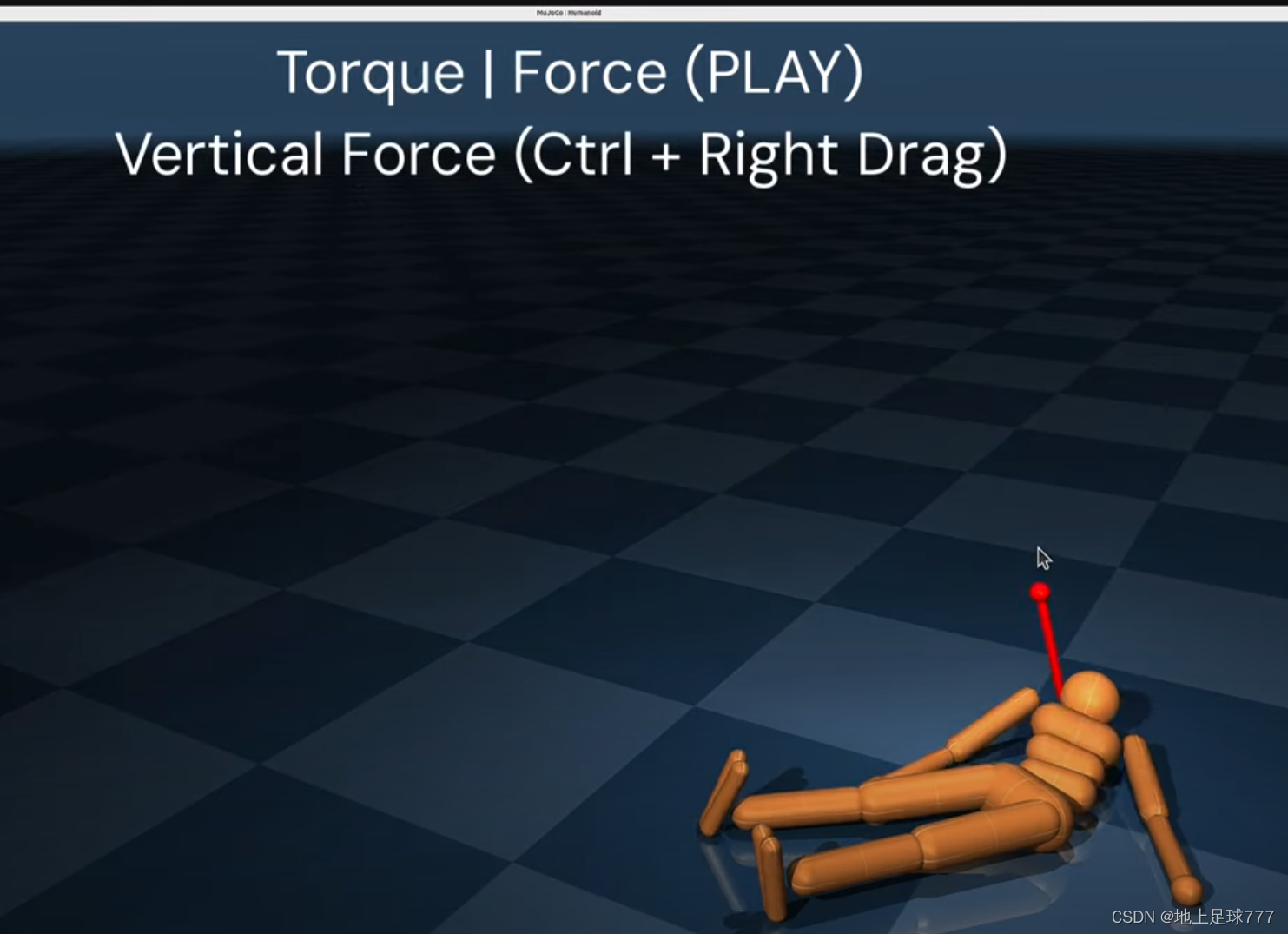
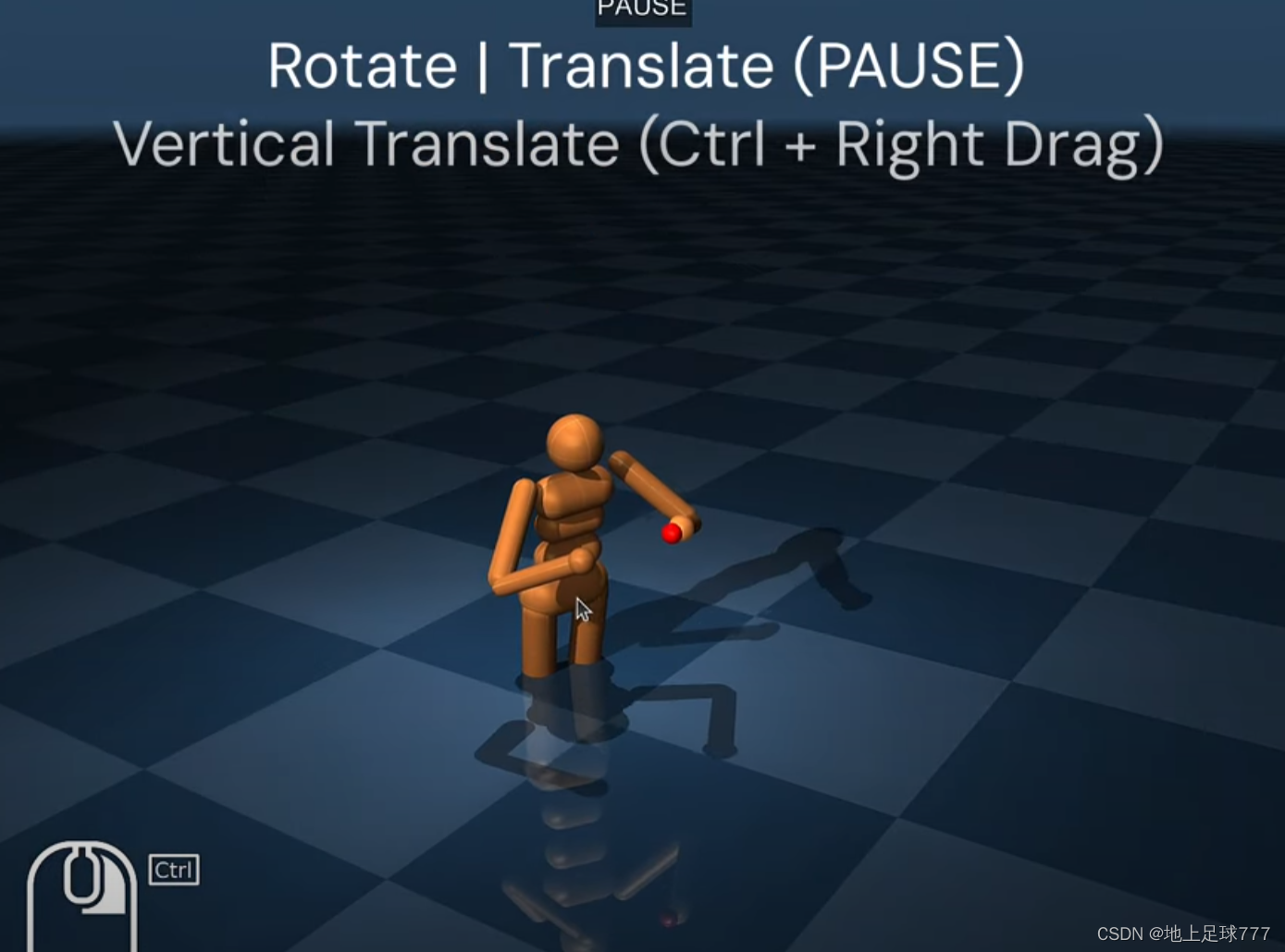
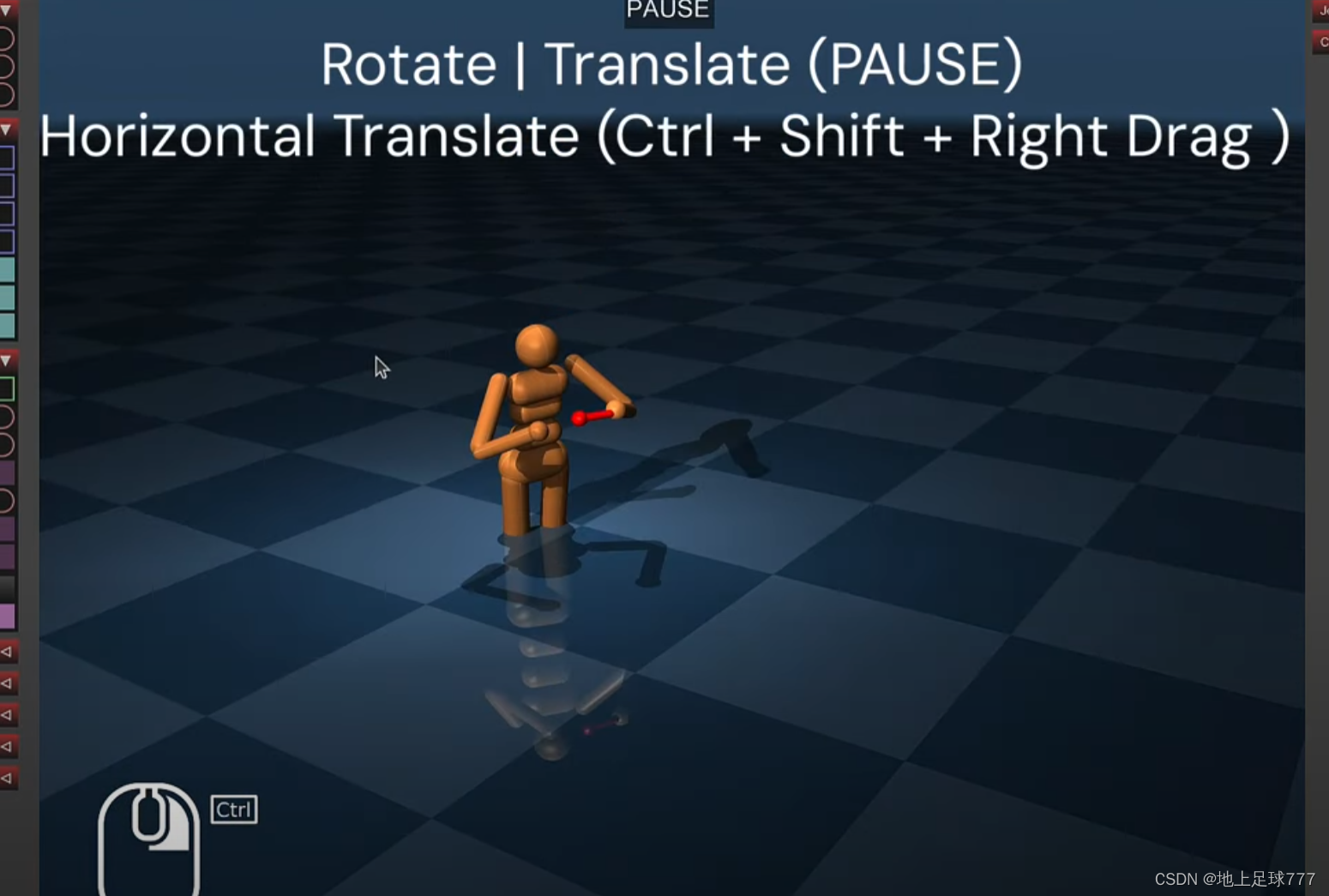
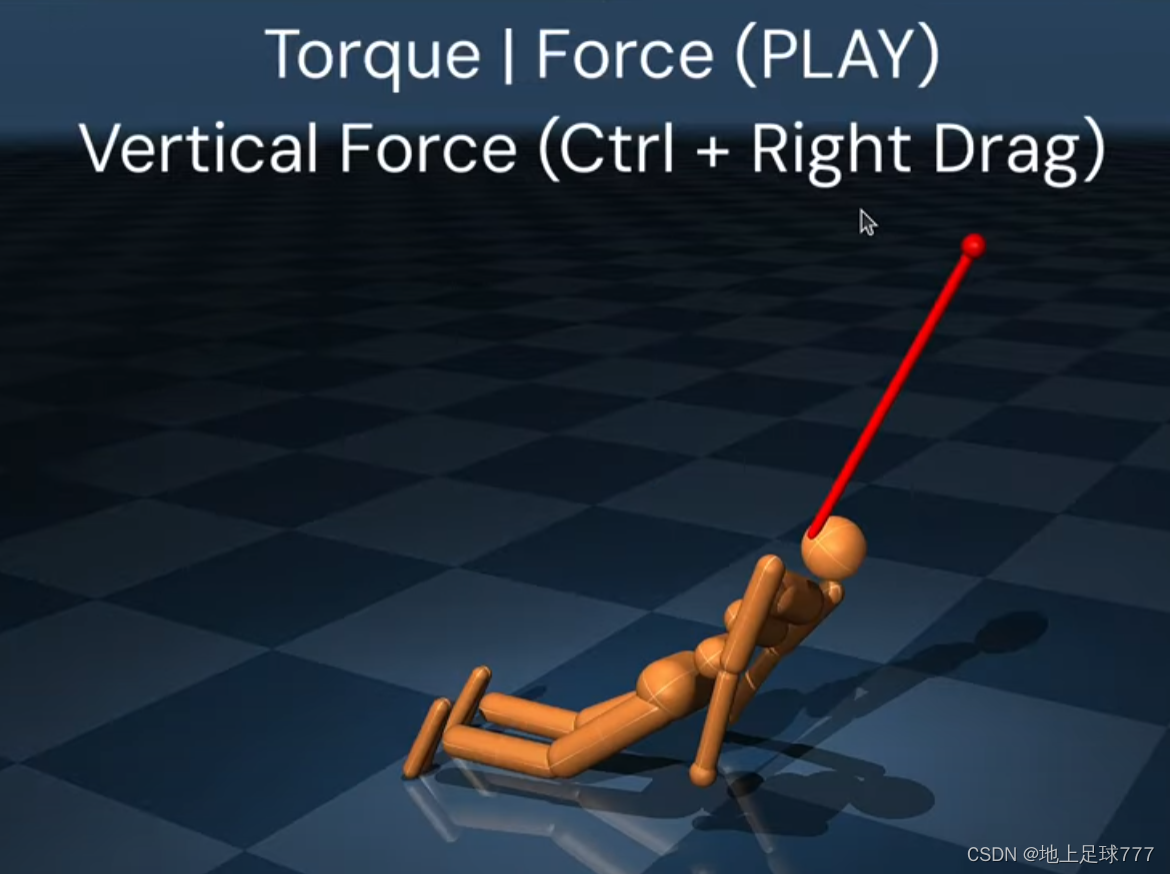
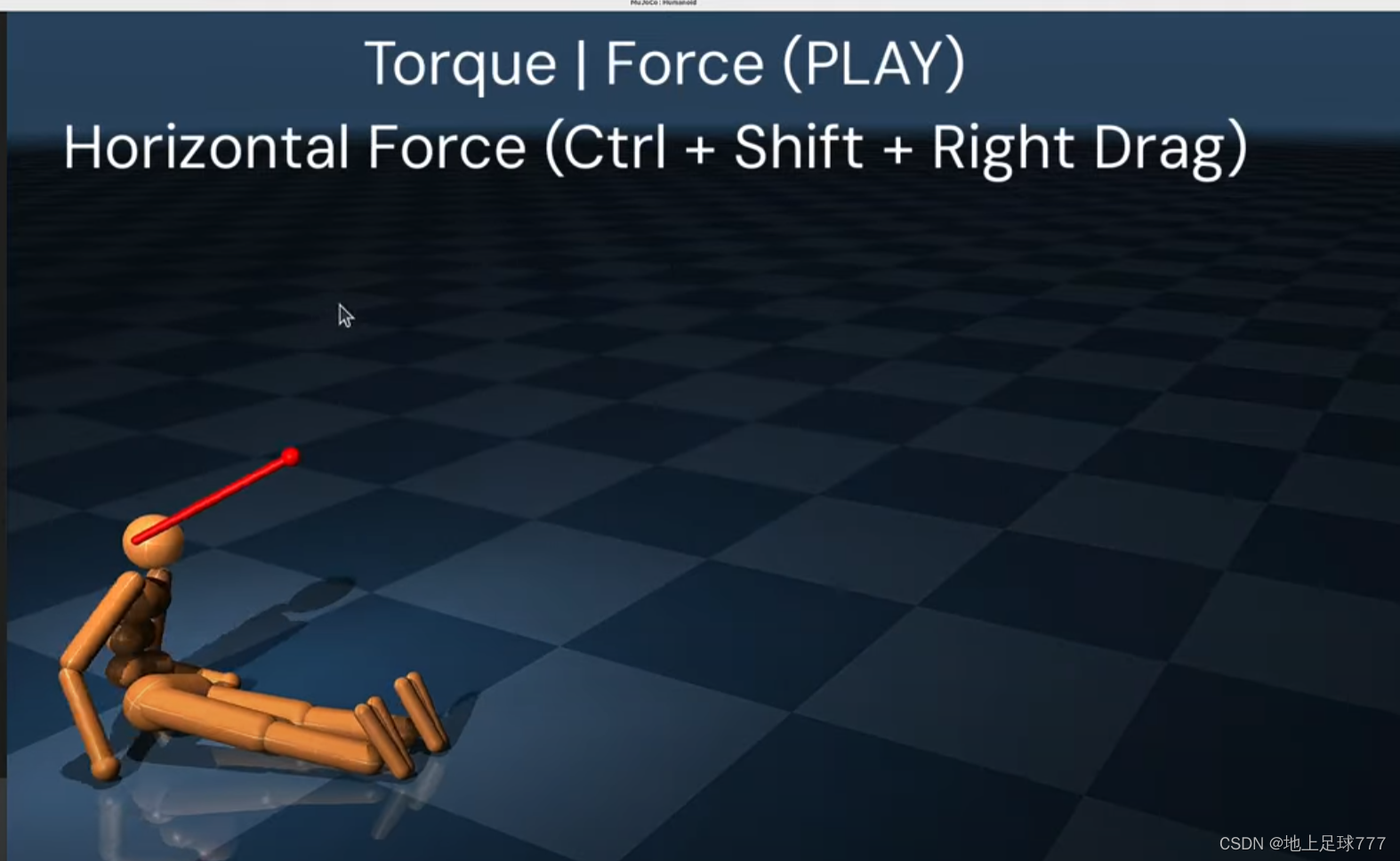
不同方向上的力施加
竖直方向
水平方向
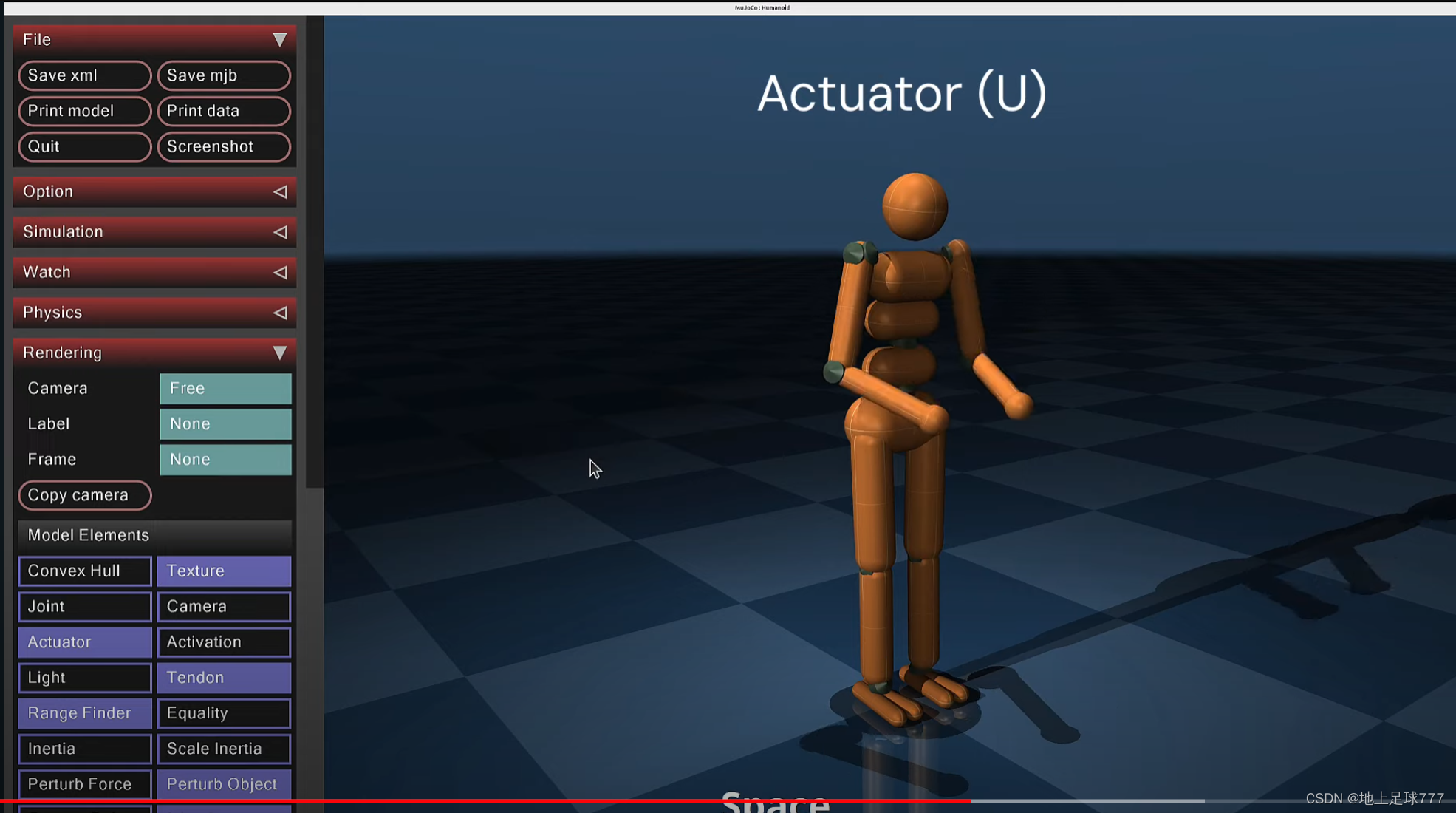
actuation
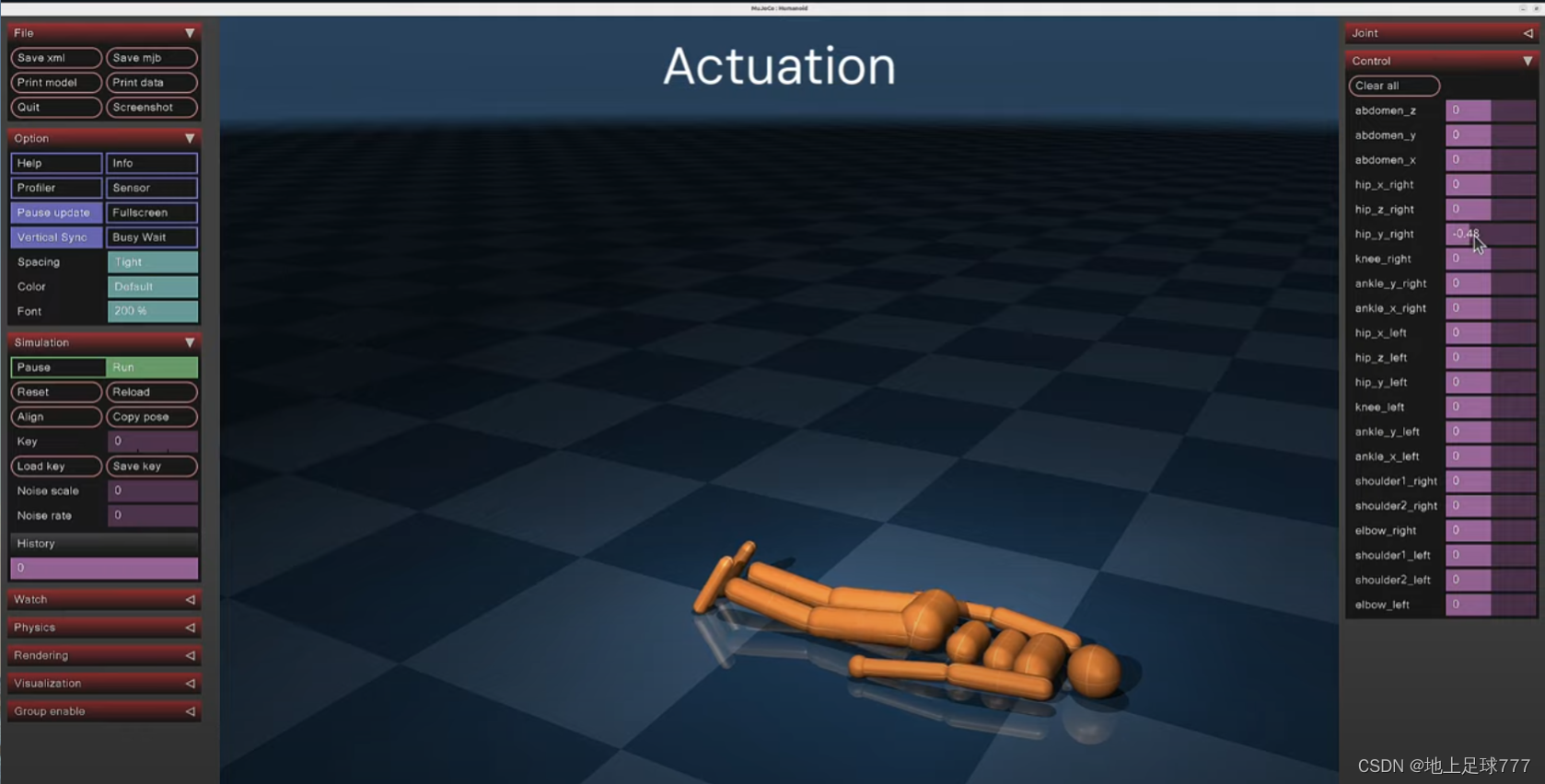
noise

在讨论噪声模型时,“noise rate” 和 “noise scale” 是两个相关但又有区别的概念:
-
Noise Rate:
- 噪声率通常指的是一个过程中噪声的频率或密度。在时间序列分析或随机过程中,噪声率描述了噪声在时间上的变化频率或者在空间上的密度。例如,对于一个随机游走模型,噪声率可以表示单位时间内随机变量的方差。
-
Noise Scale:
- 噪声尺度(Noise Scale)则通常指噪声的振幅或大小。它描述了噪声的强度或者说波动的幅度。在实际应用中,常用于指导噪声模型的具体大小设置,以及影响系统或模型的不确定性程度。例如,对于一个控制系统,噪声尺度可以表示测量误差或环境扰动的强度。
总结来说,噪声率(Noise Rate)关注噪声的频率特性或密度分布,而噪声尺度(Noise Scale)则关注噪声的振幅或大小。在具体的数学建模或实际应用中,正确理解和设置这两个参数对于准确模拟或预测系统的随机特性至关重要。
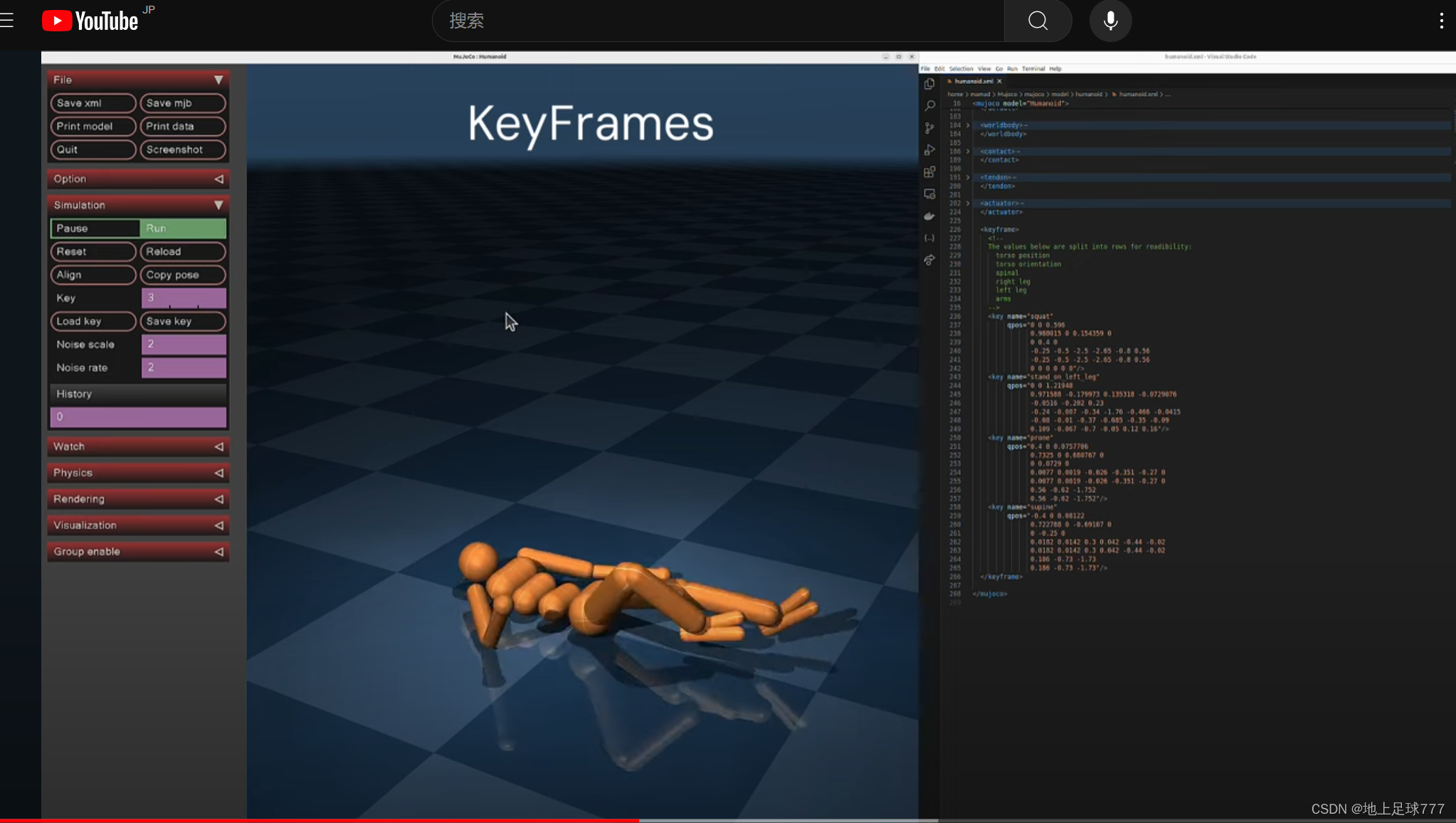
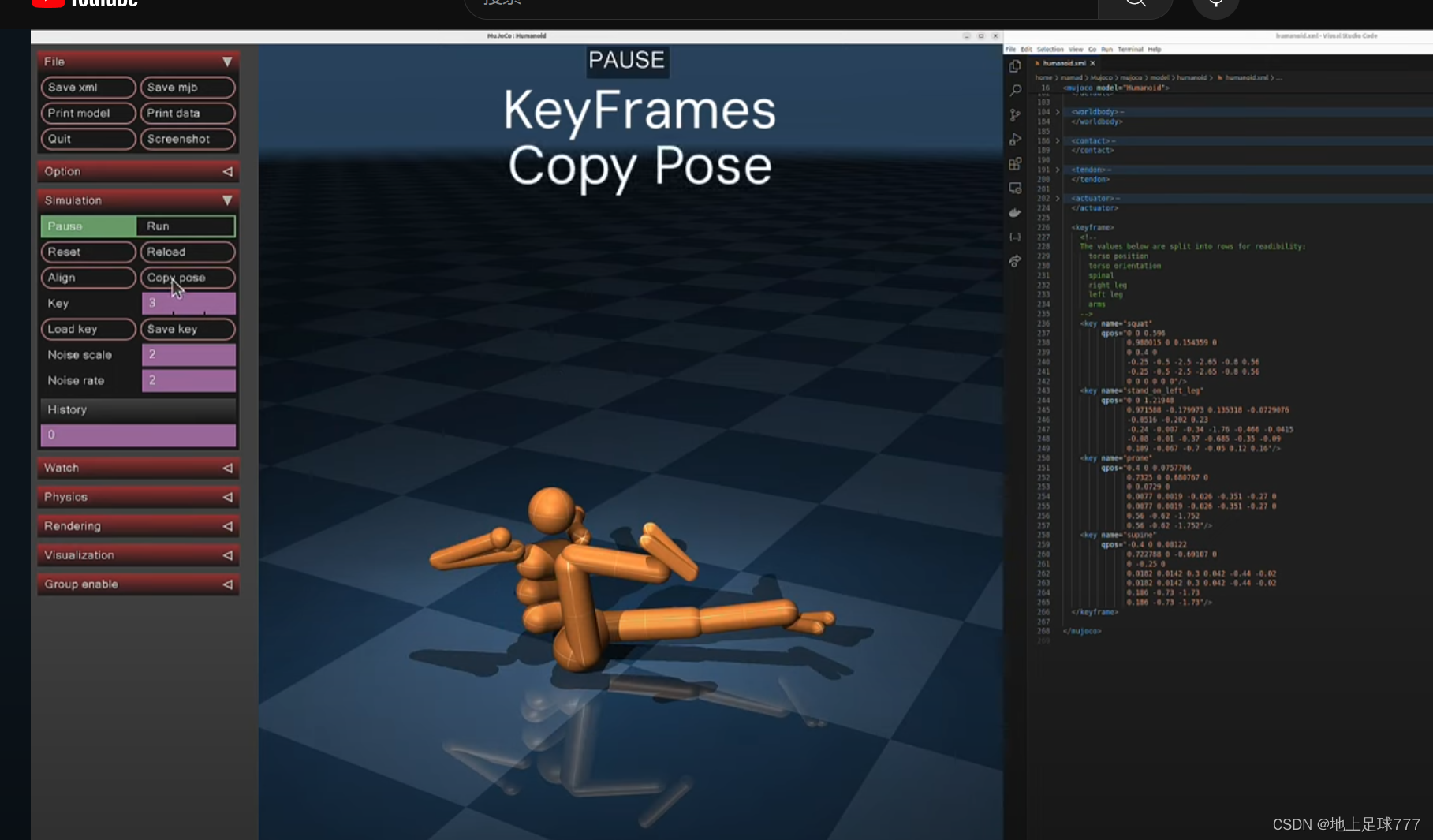
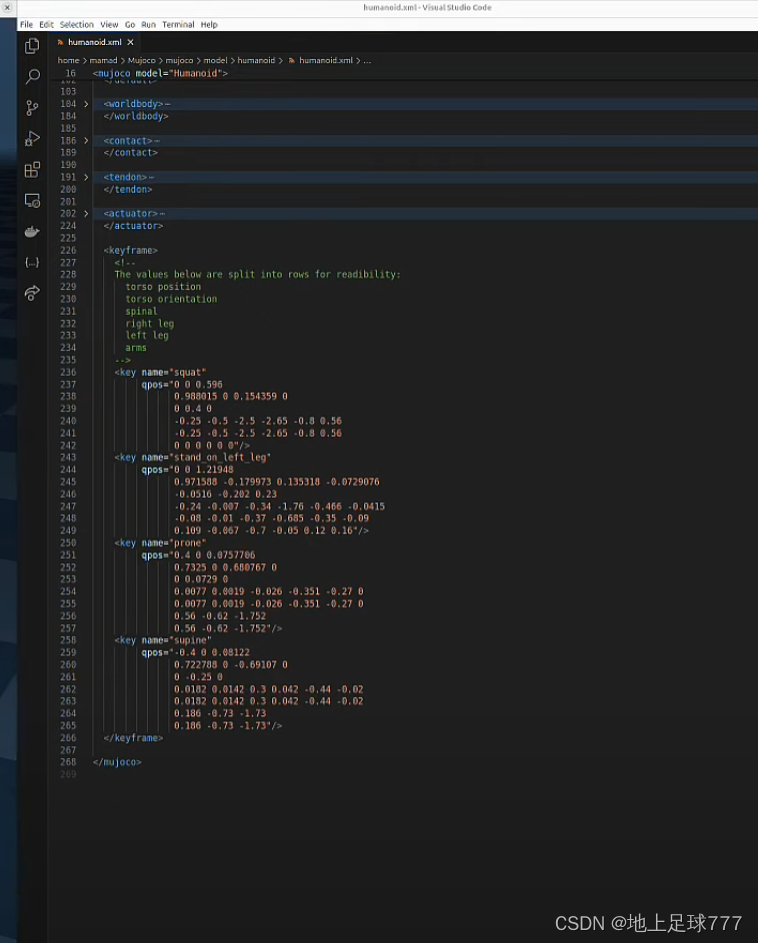
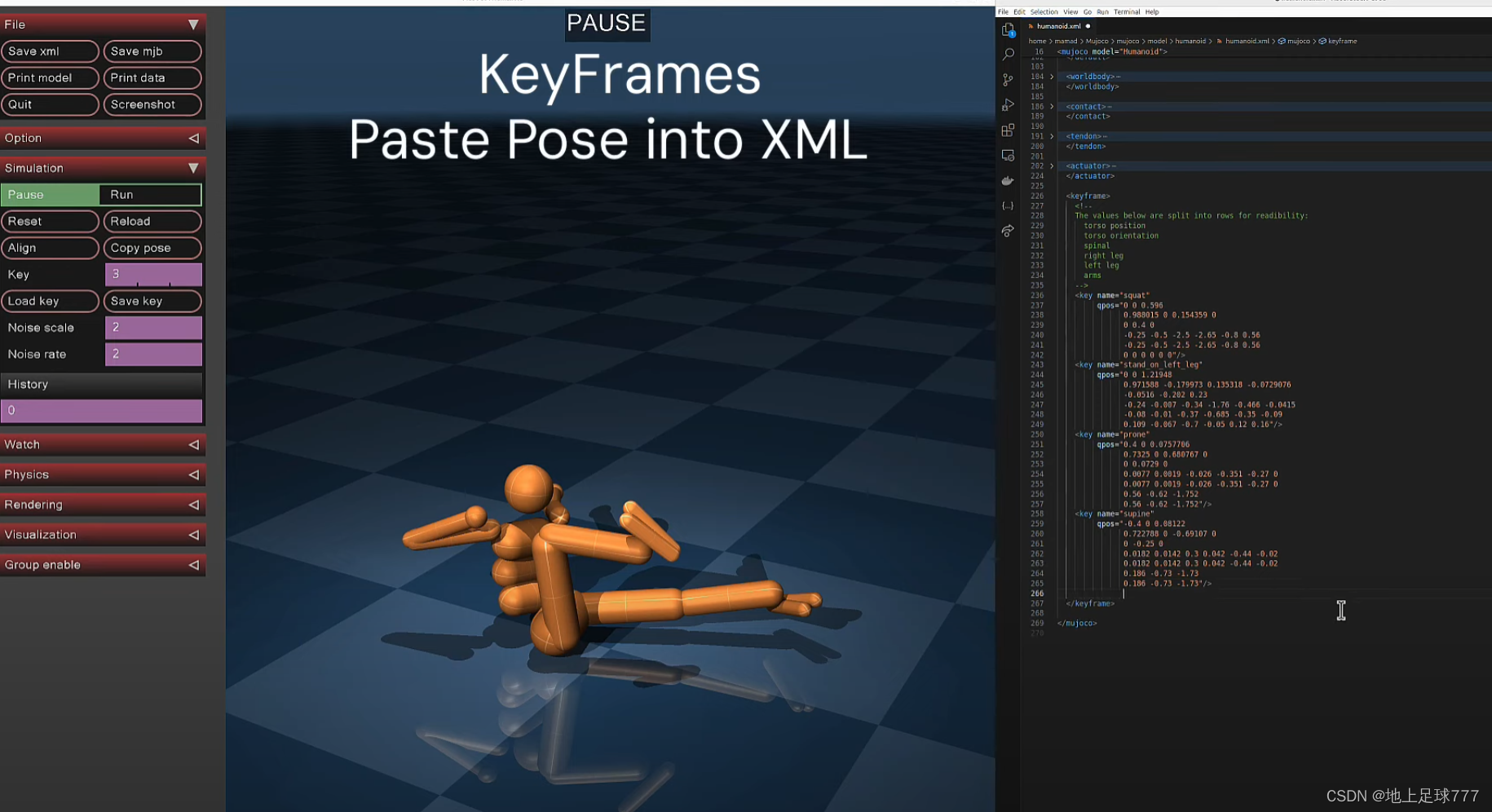
重新加载模型后便有了 新添加的关键帧
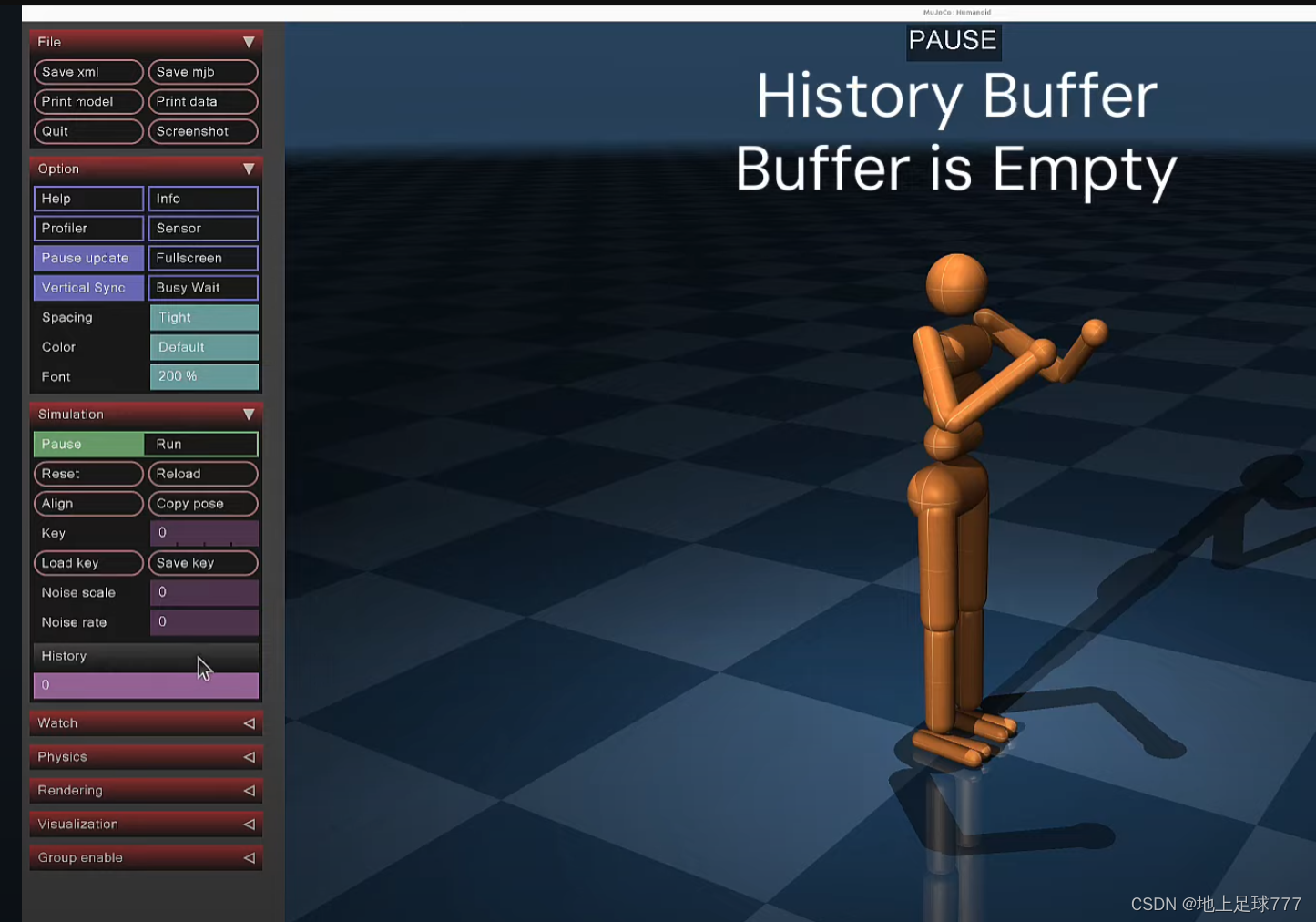
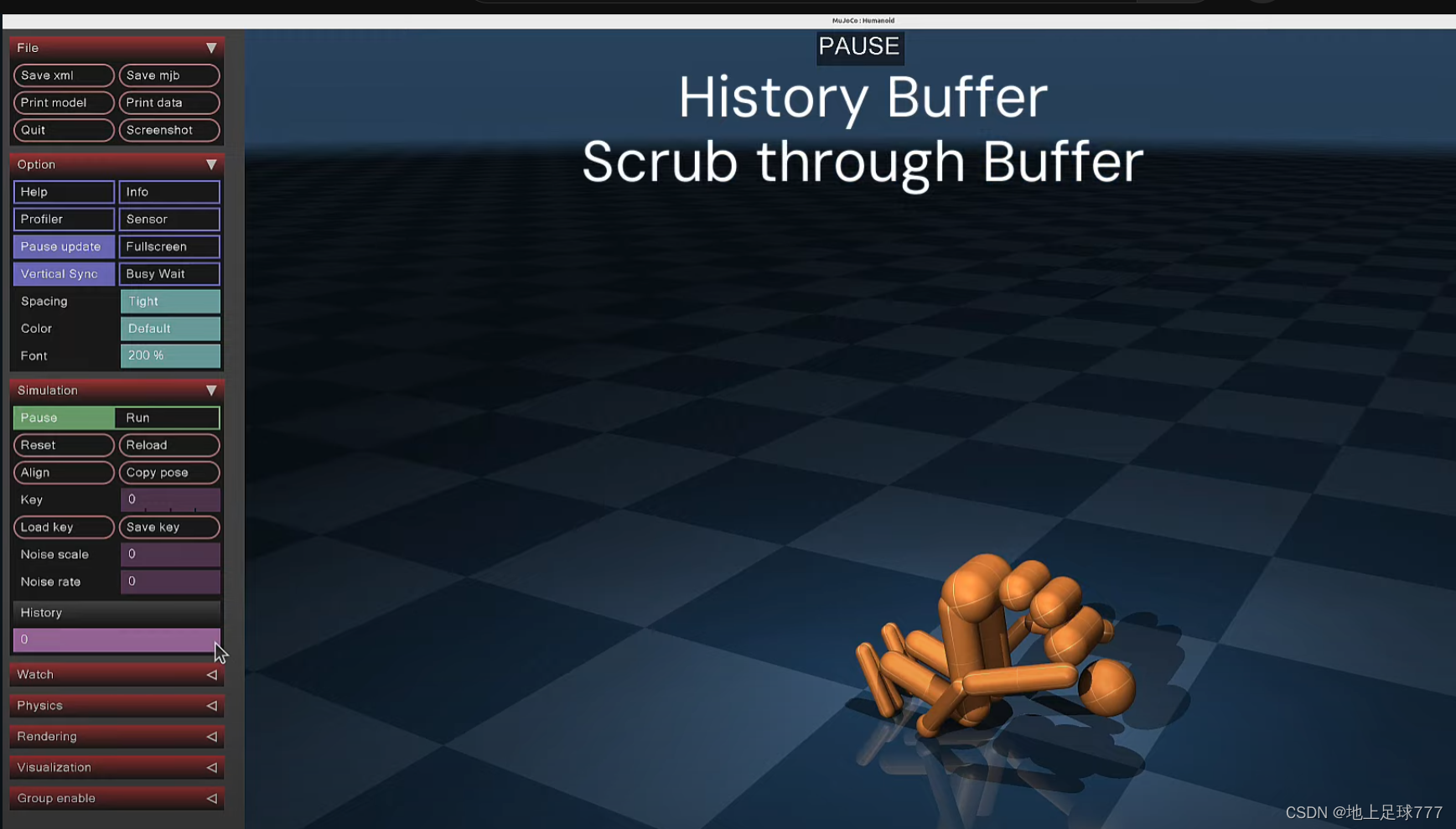
history buffer

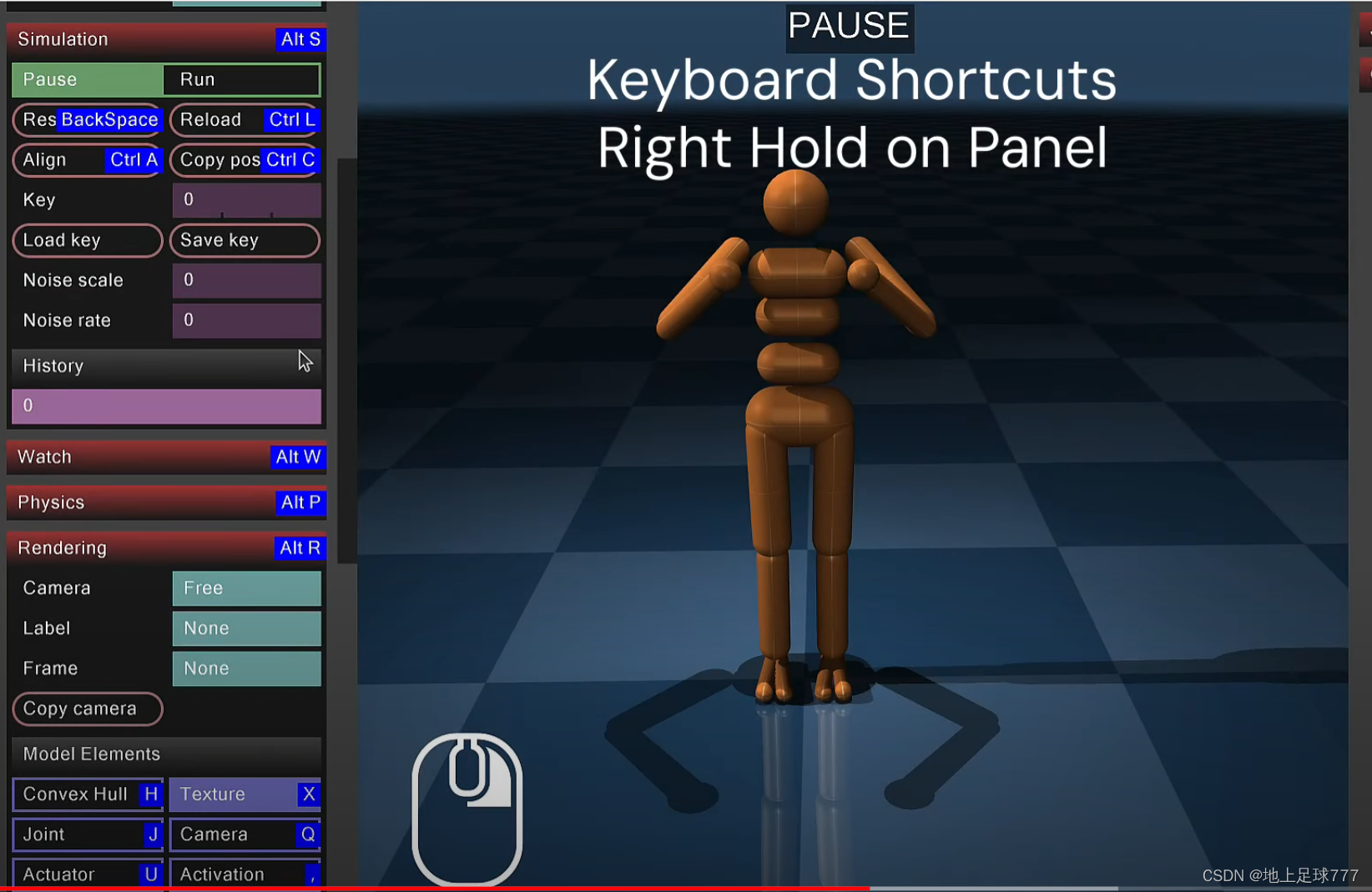
keyboard shortcut

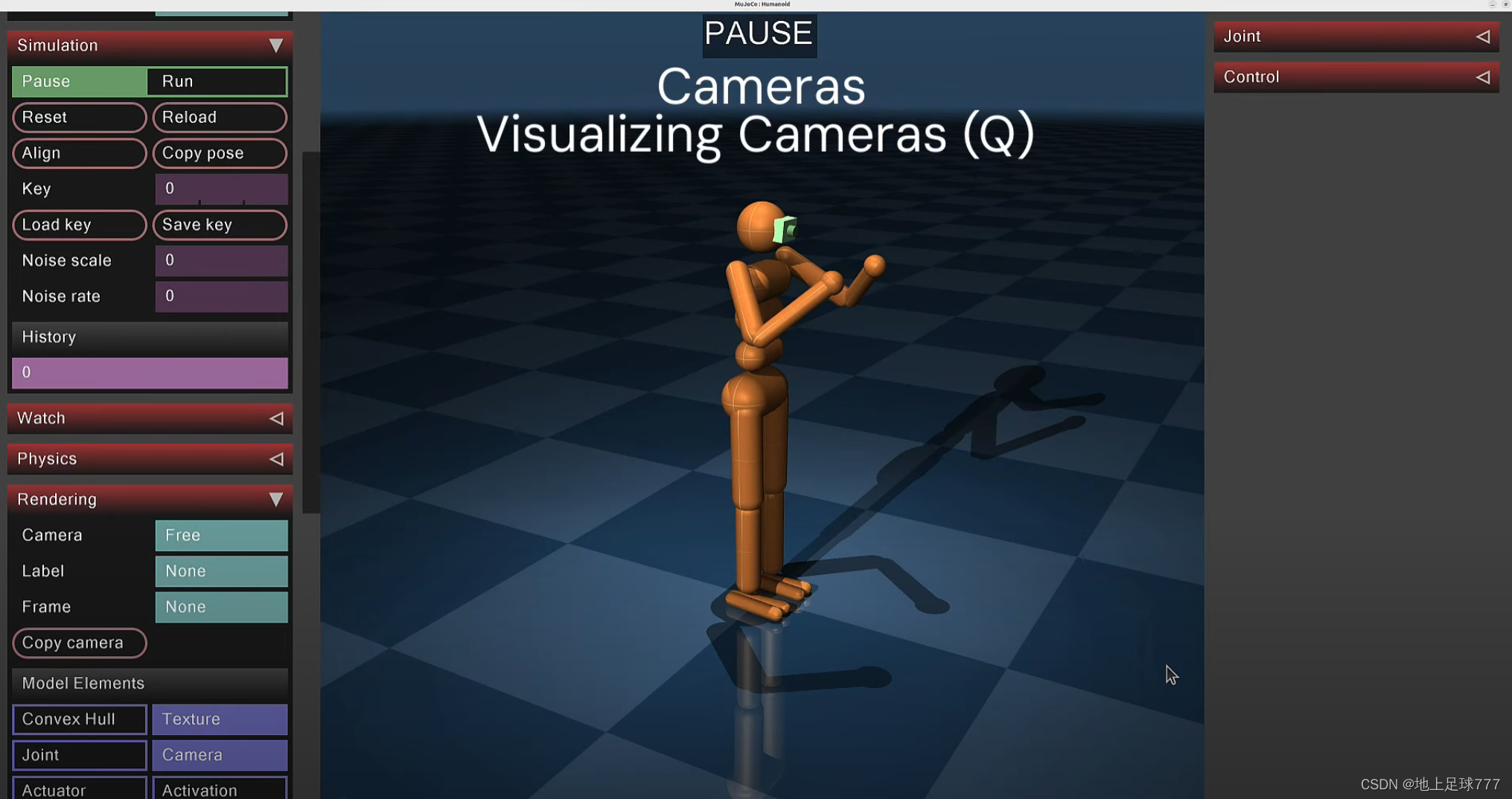
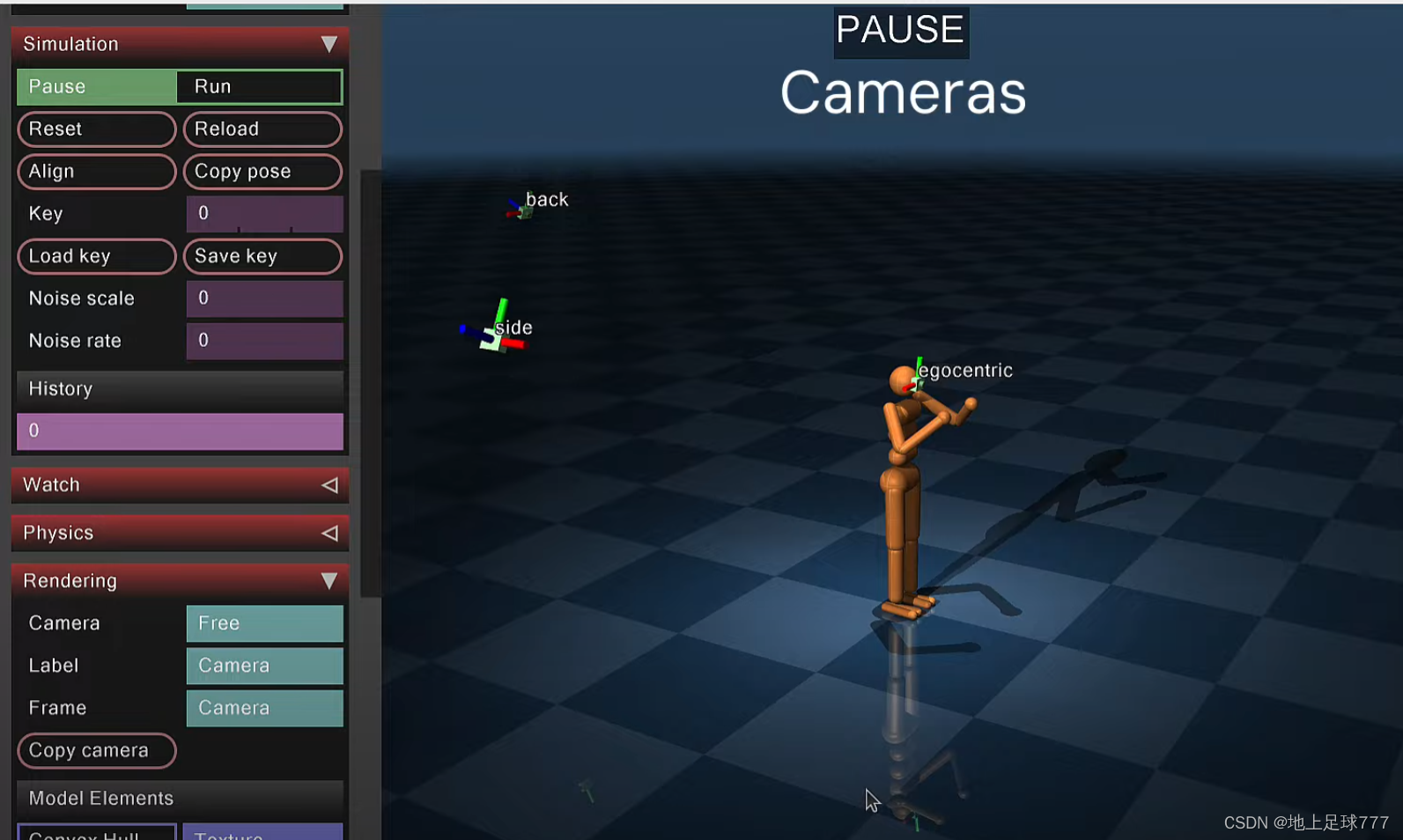
camera
可视化相机


lights

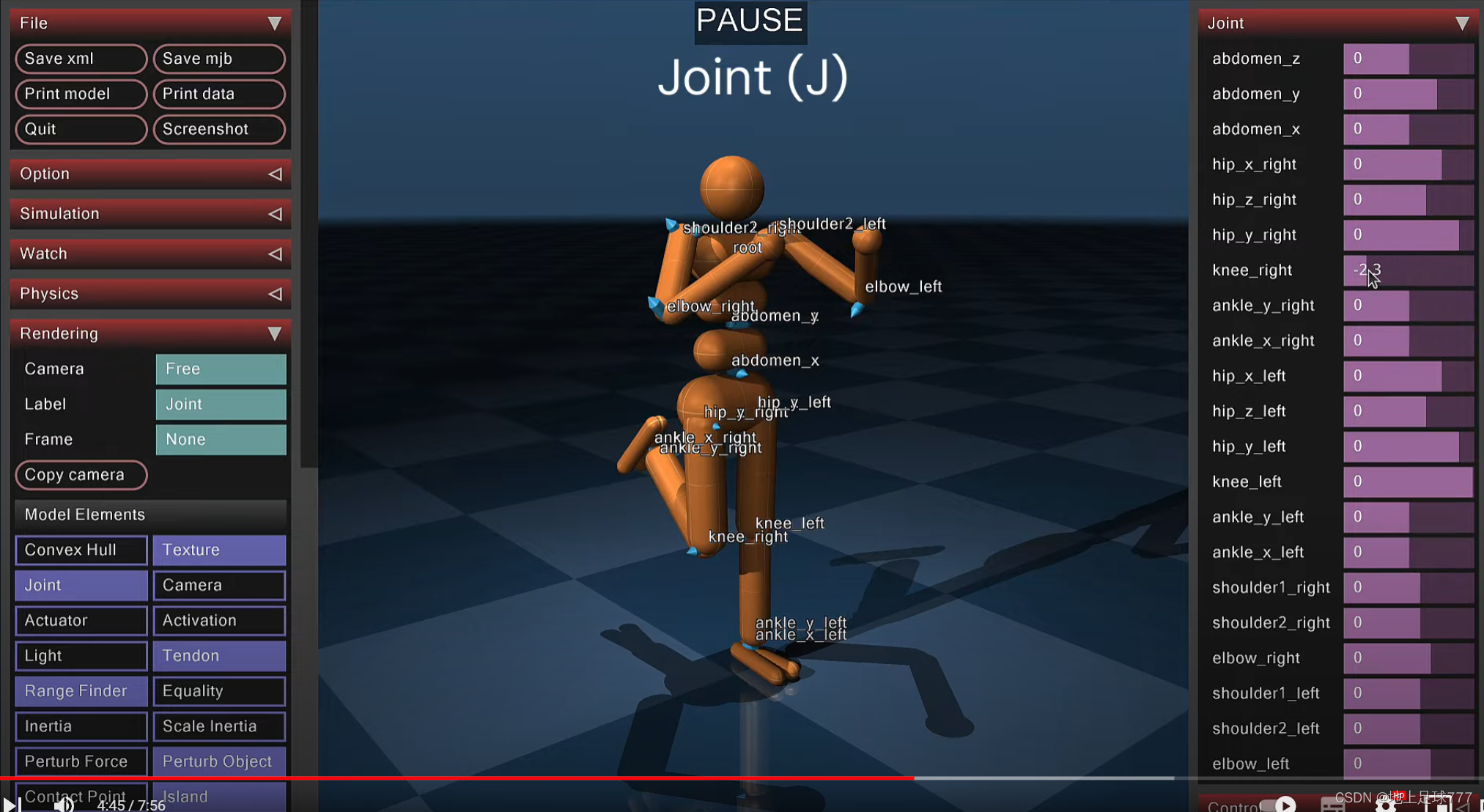
joints actuator
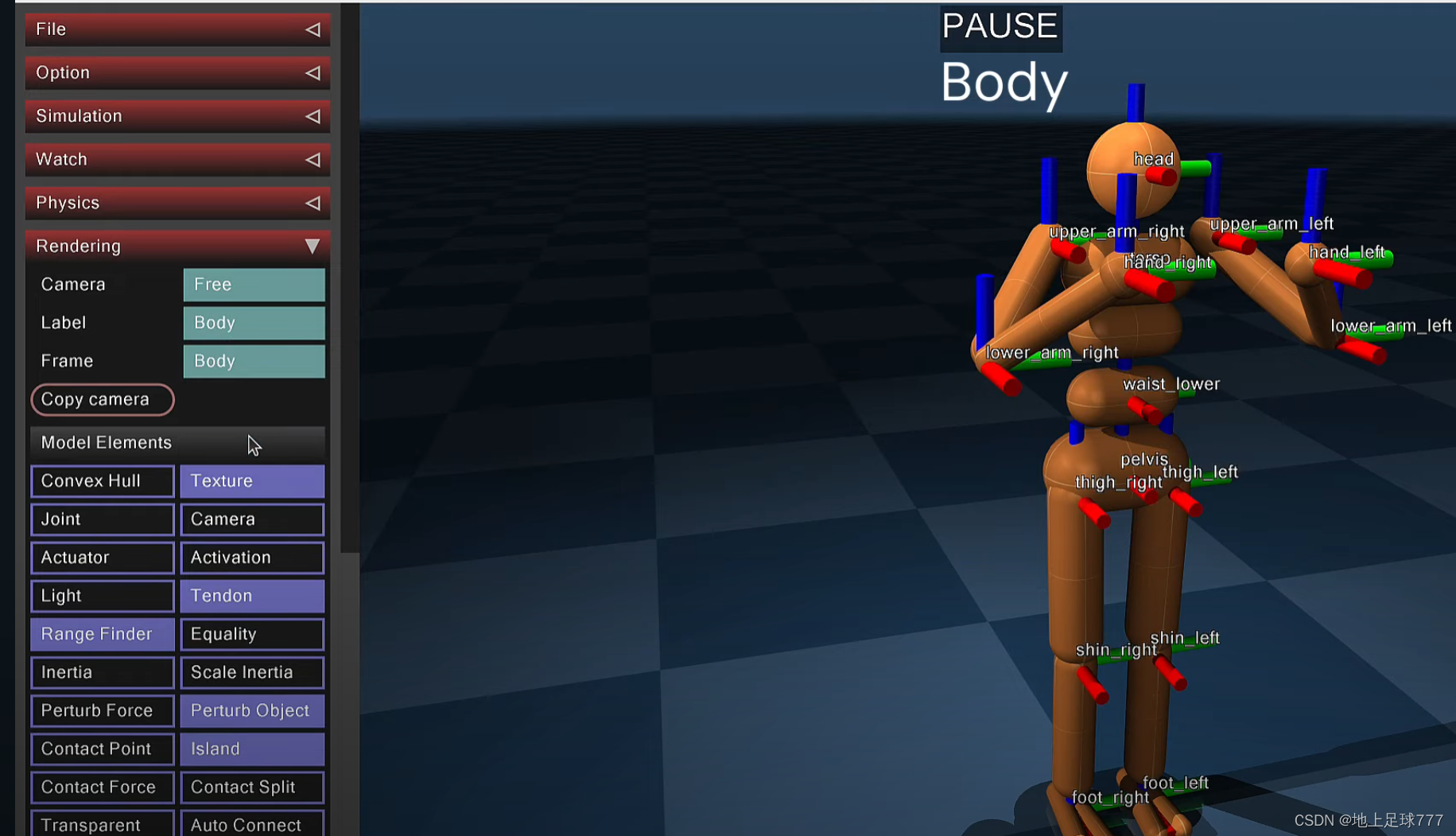
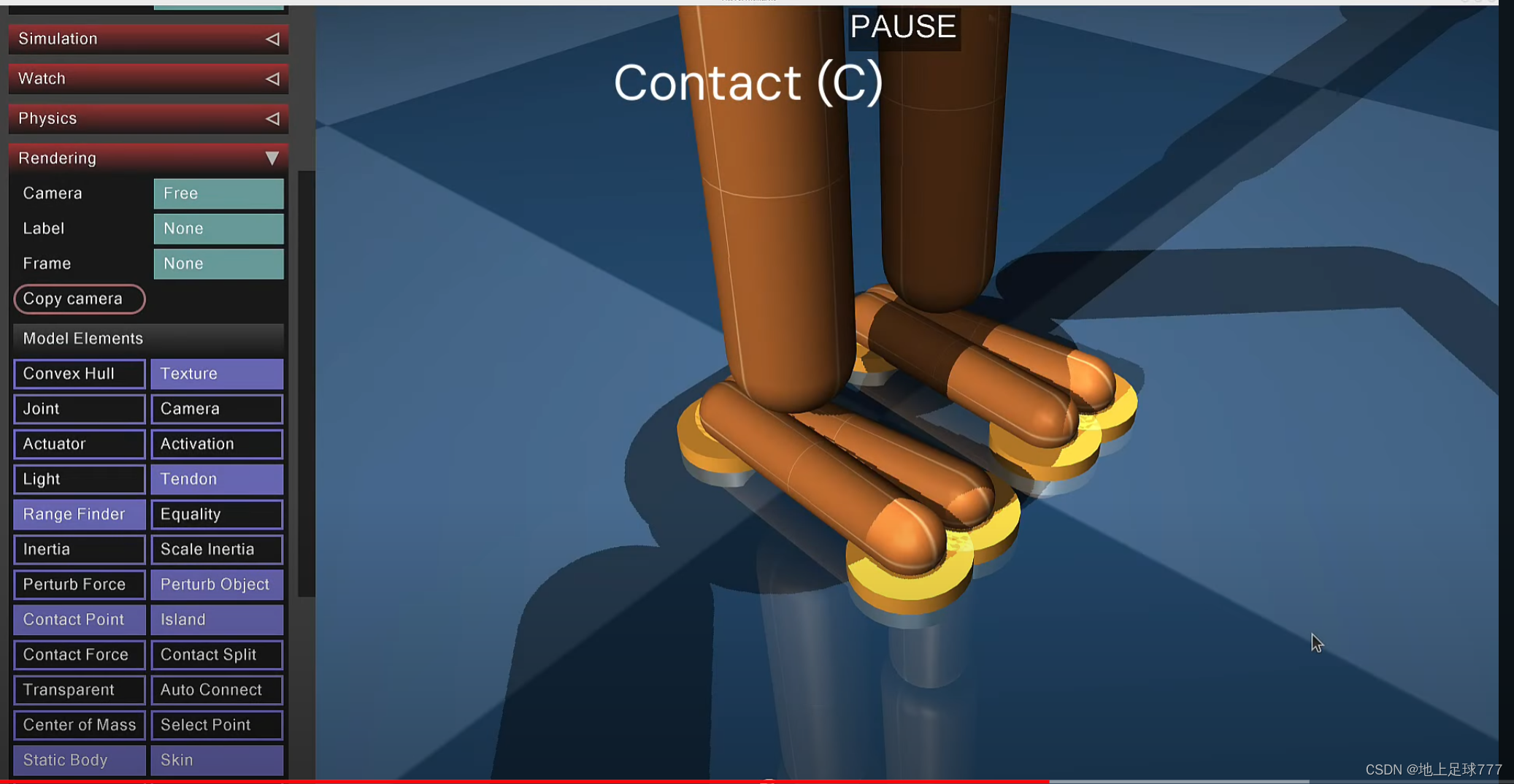
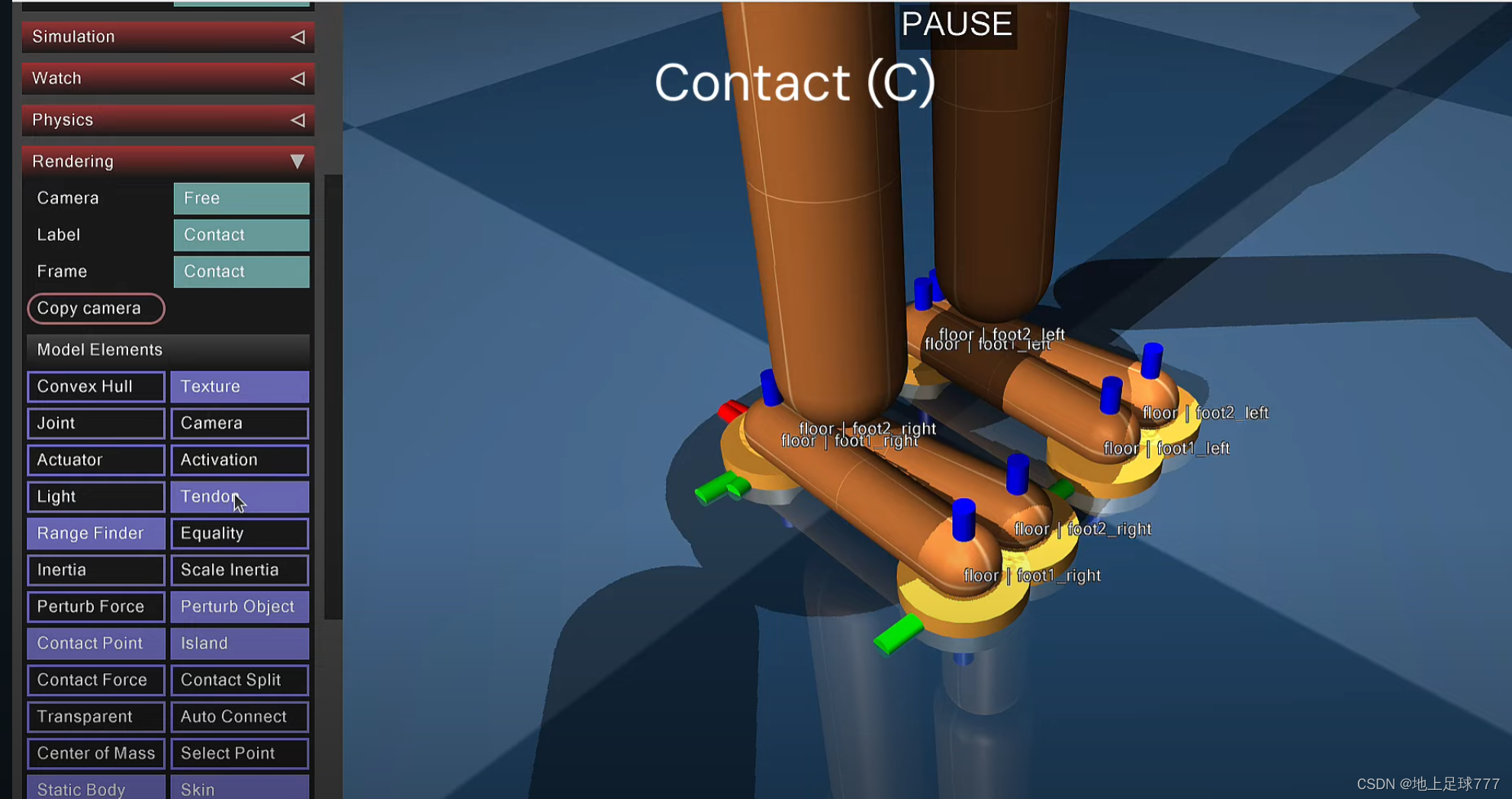
contact
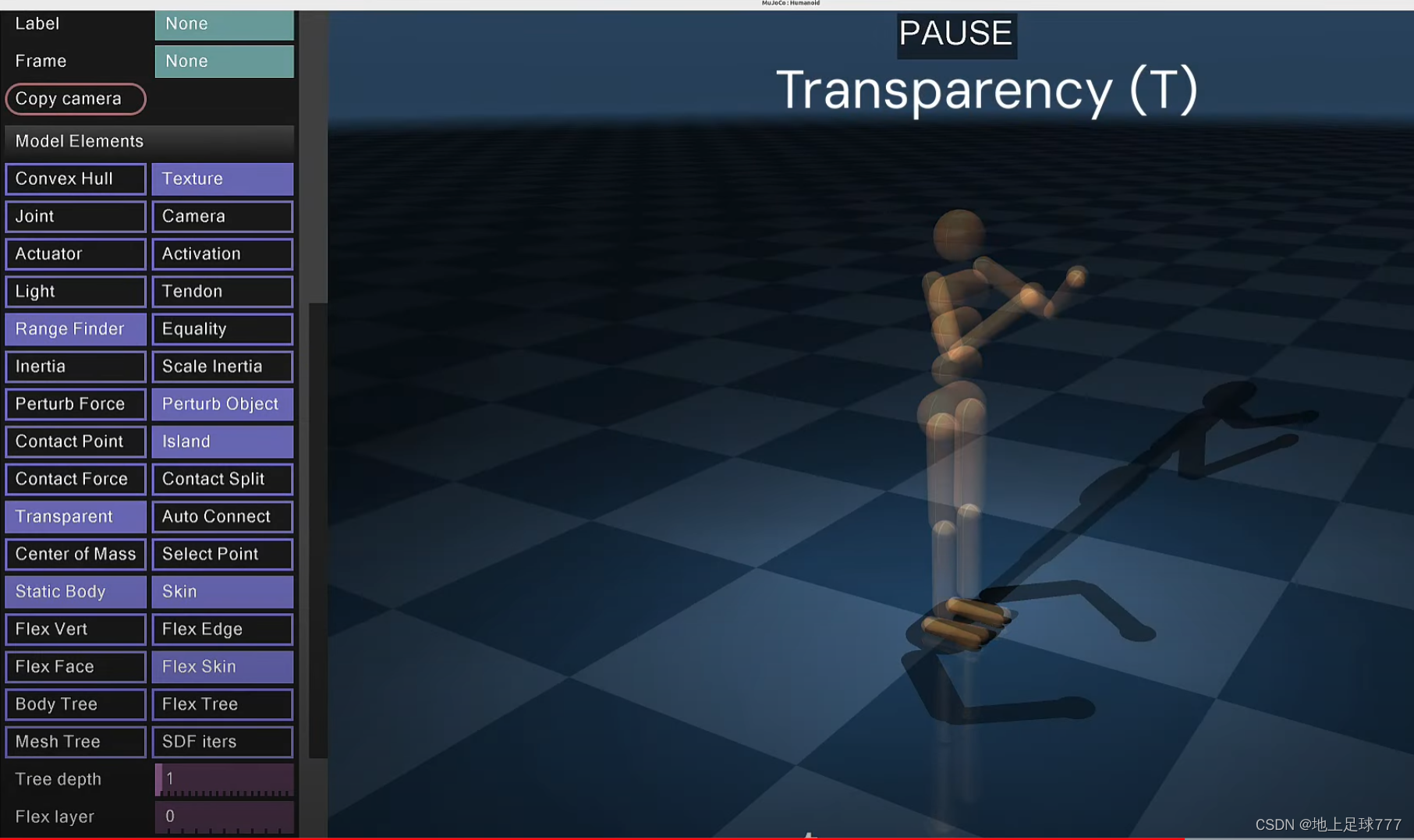
transparency
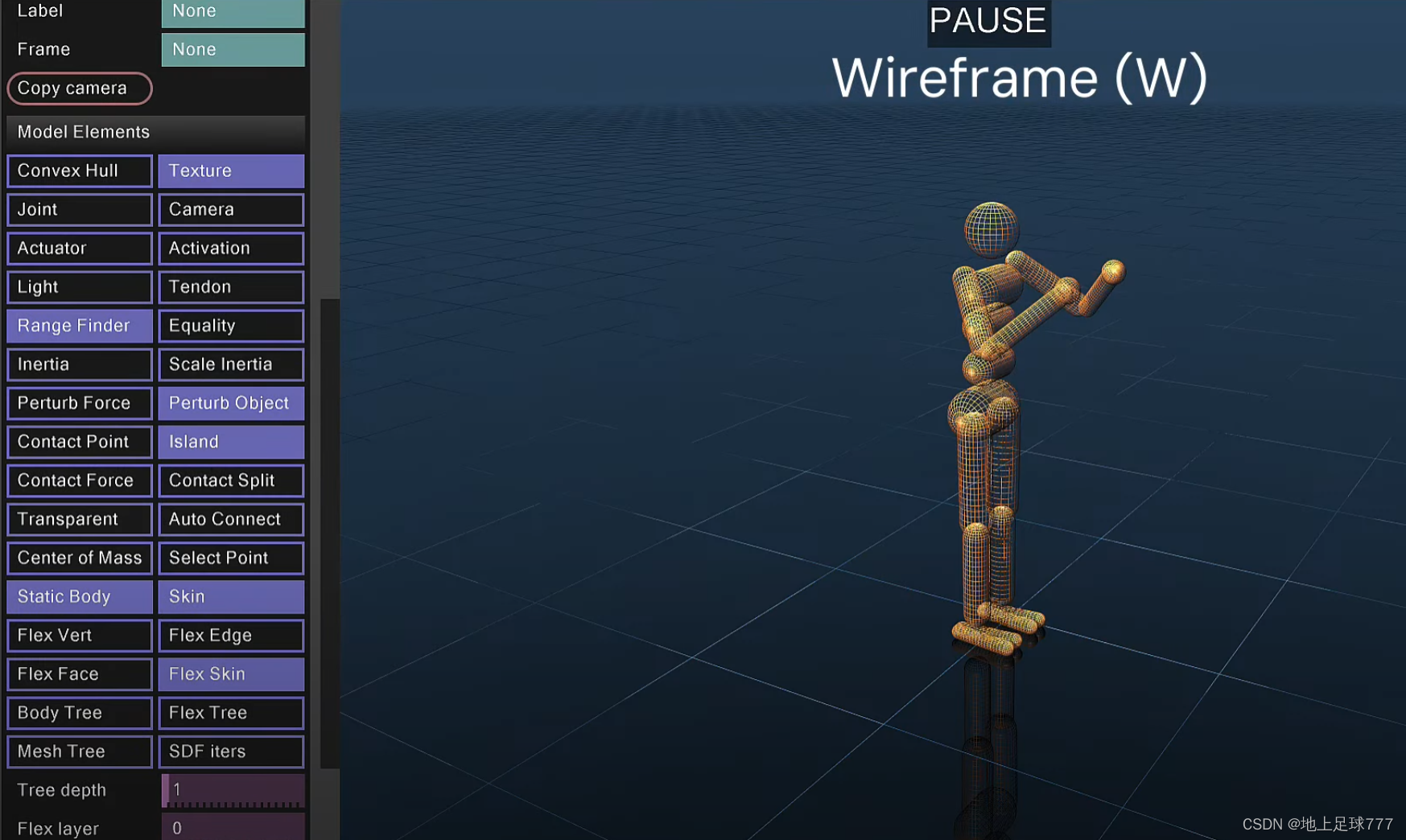
wire frame
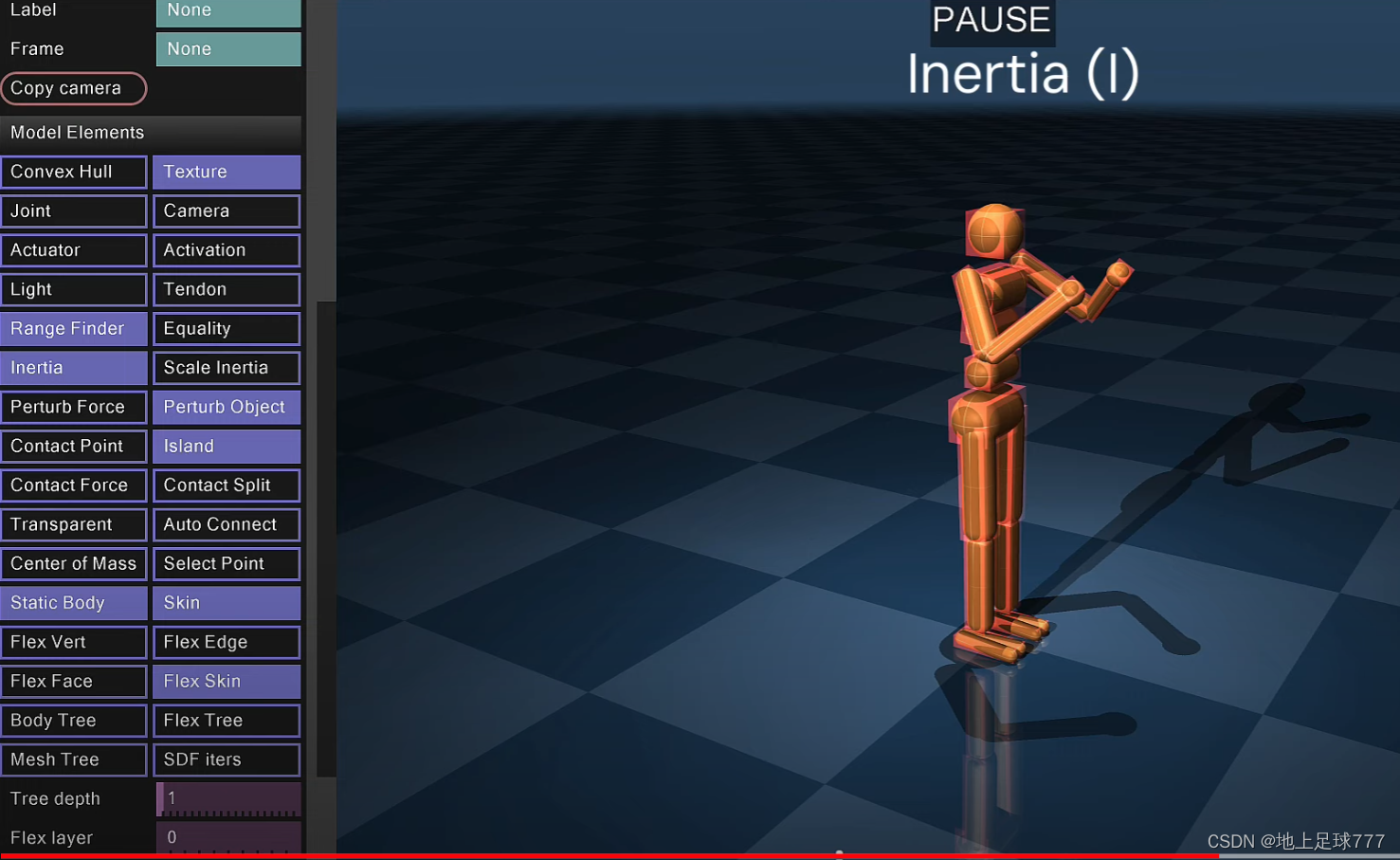
inertia
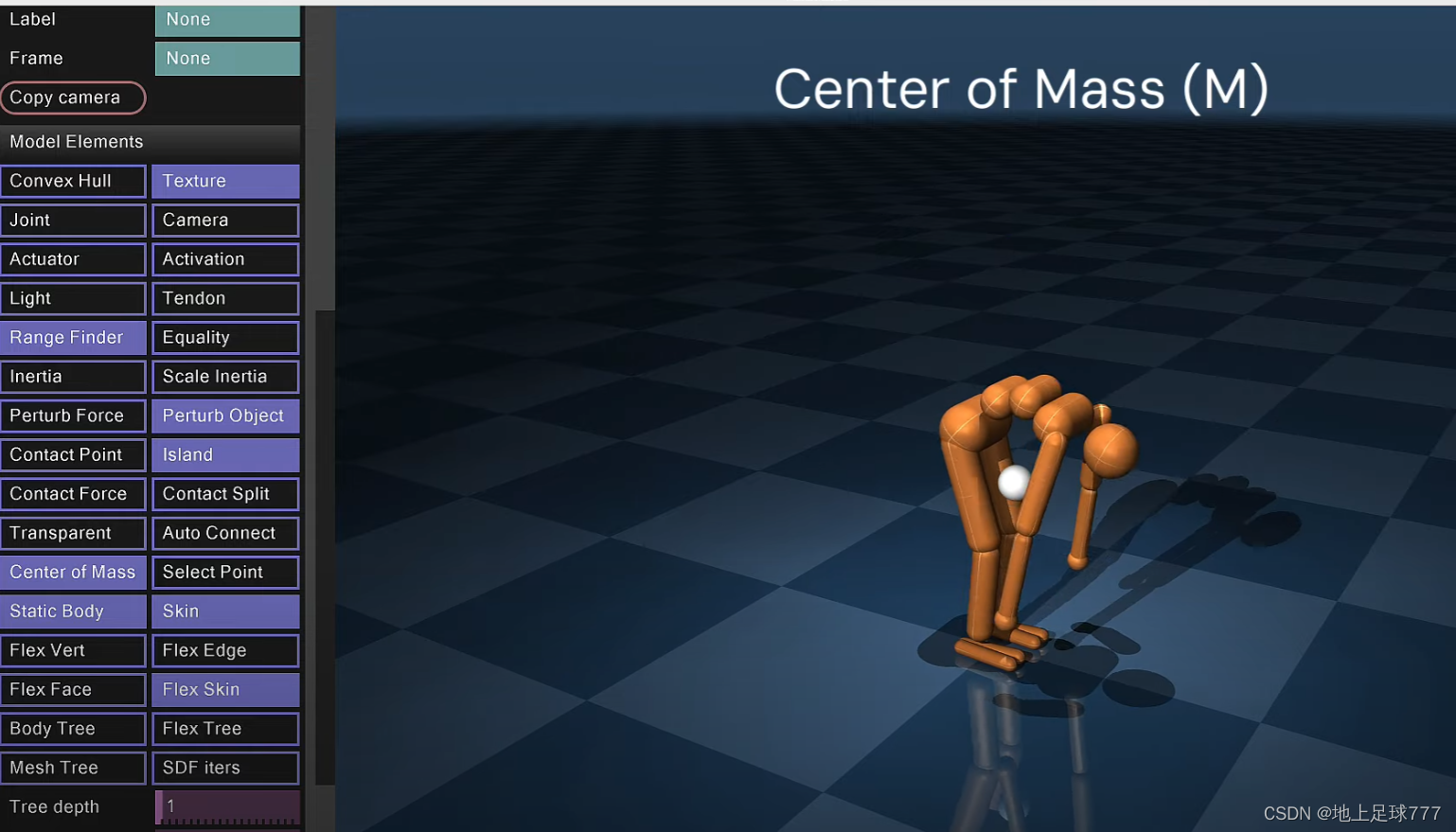
center of mass
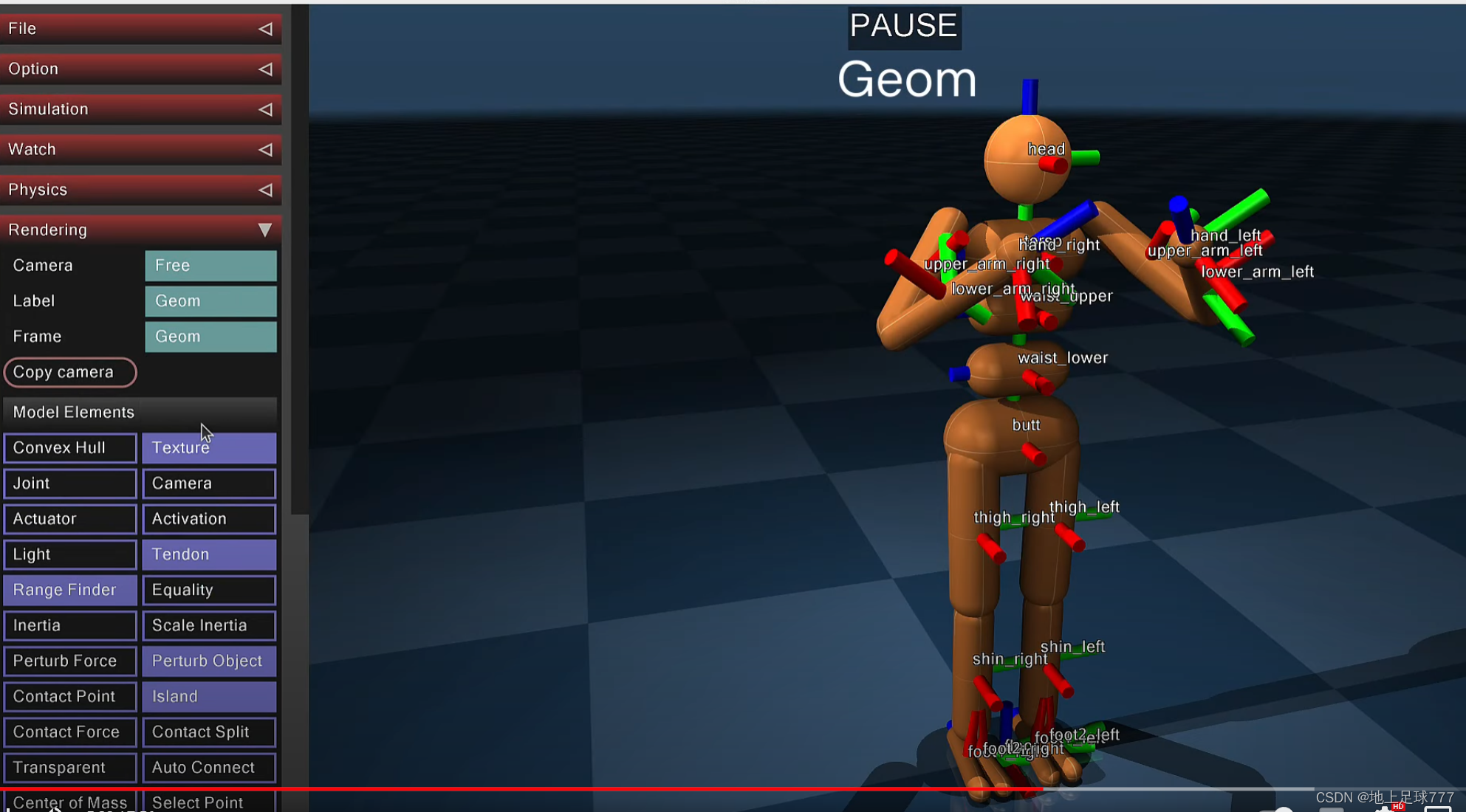
在机器人学和生物学中,“geom”, “site”, “joint”, 和 “tendon” 是描述模型结构或实体的术语。这些术语在不同的领域和上下文中可能略有不同的含义,下面我会解释它们在机器人学中的一般用法:
-
Geom (Geometry):
- 在机器人学中,“geom” 通常指的是物体的几何形状或图形。在模型中,它可以是一个表示物体外形或碰撞检测区域的几何体,比如一个盒子、球体或其他形状。Geoms通常用来定义模型的可视化外观和碰撞检测区域。
-
Site:
- “Site” 是机器人模型中的一个关键概念,用于定义连接点或参考点。它通常用来表示机器人的关节(joint)位置或者其他重要位置,如末端执行器(end-effector)的位置。Sites 可以用来在控制和仿真中指定位置和方向。在模型中,通常会定义多个site来表示机器人的关节轴心或其他重要的操作点。
-
Joint:
- “Joint” 是连接两个或多个部件的位置或轴。在机器人模型中,关节定义了不同部件(如机器人臂的关节)之间的连接和运动自由度。关节类型包括旋转关节、平移关节等,用来描述机器人的可控运动。关节允许模型在仿真中模拟和控制各个部件之间的相对运动。
-
Tendon:
- “Tendon” 是连接肌肉和骨骼之间的柔性结构,用来传递力量和产生运动。在机器人模型中,tendon通常用来模拟这种柔性结构,特别是在仿真软体机器人或仿生机器人时。Tendon允许模型更加逼真地模拟肌肉与骨骼之间的动态关系和运动特性。
综上所述,“geom” 主要用来表示几何形状或碰撞检测区域,“site” 是模型中的连接点或参考点,“joint” 是连接机器人部件的运动关节,而 “tendon” 是用来模拟肌肉和骨骼之间连接的柔性结构。这些术语在机器人模型中,各自扮演着不同但重要的角色,用来描述和模拟机器人的结构、运动和力学特性。
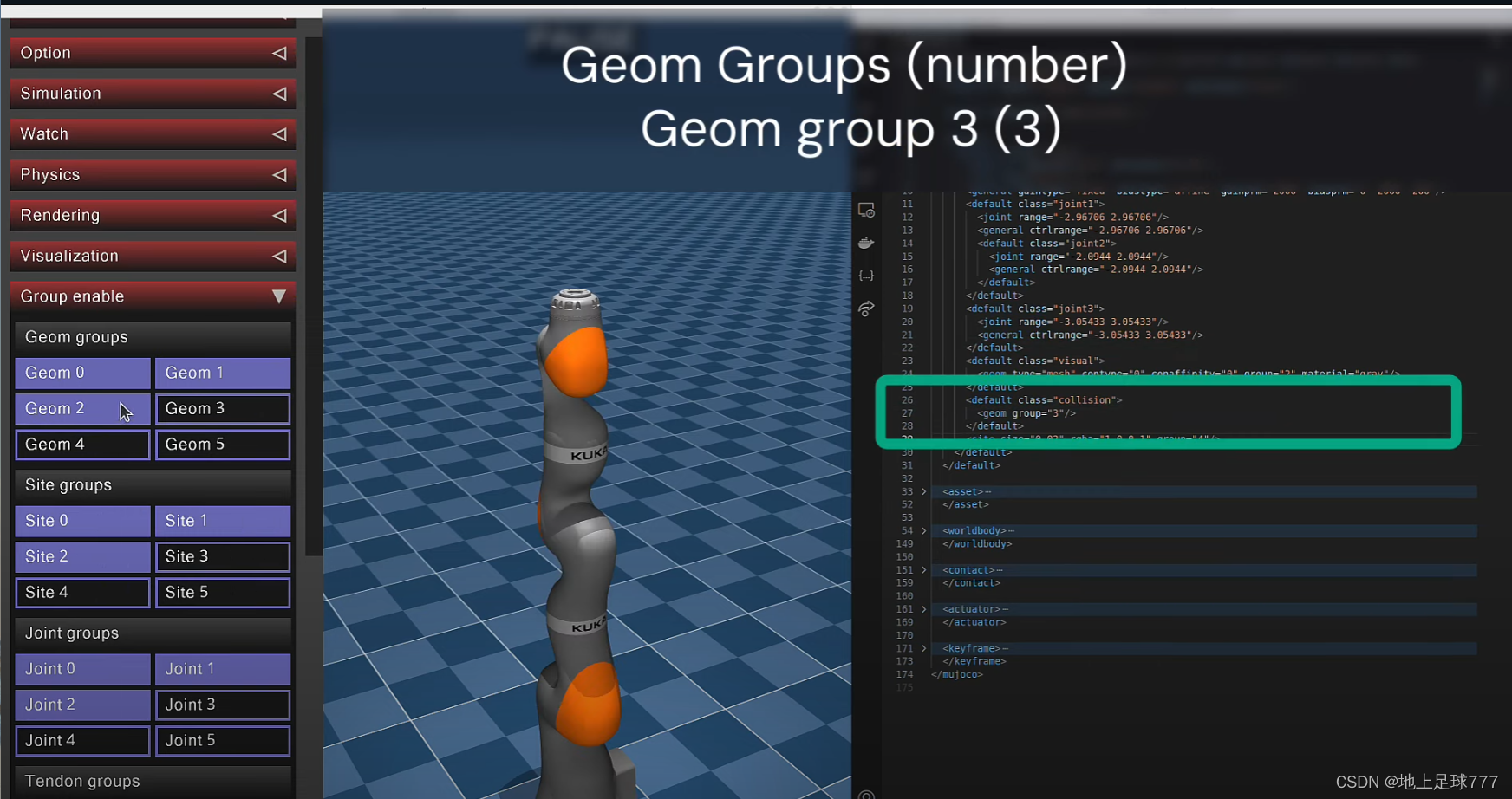
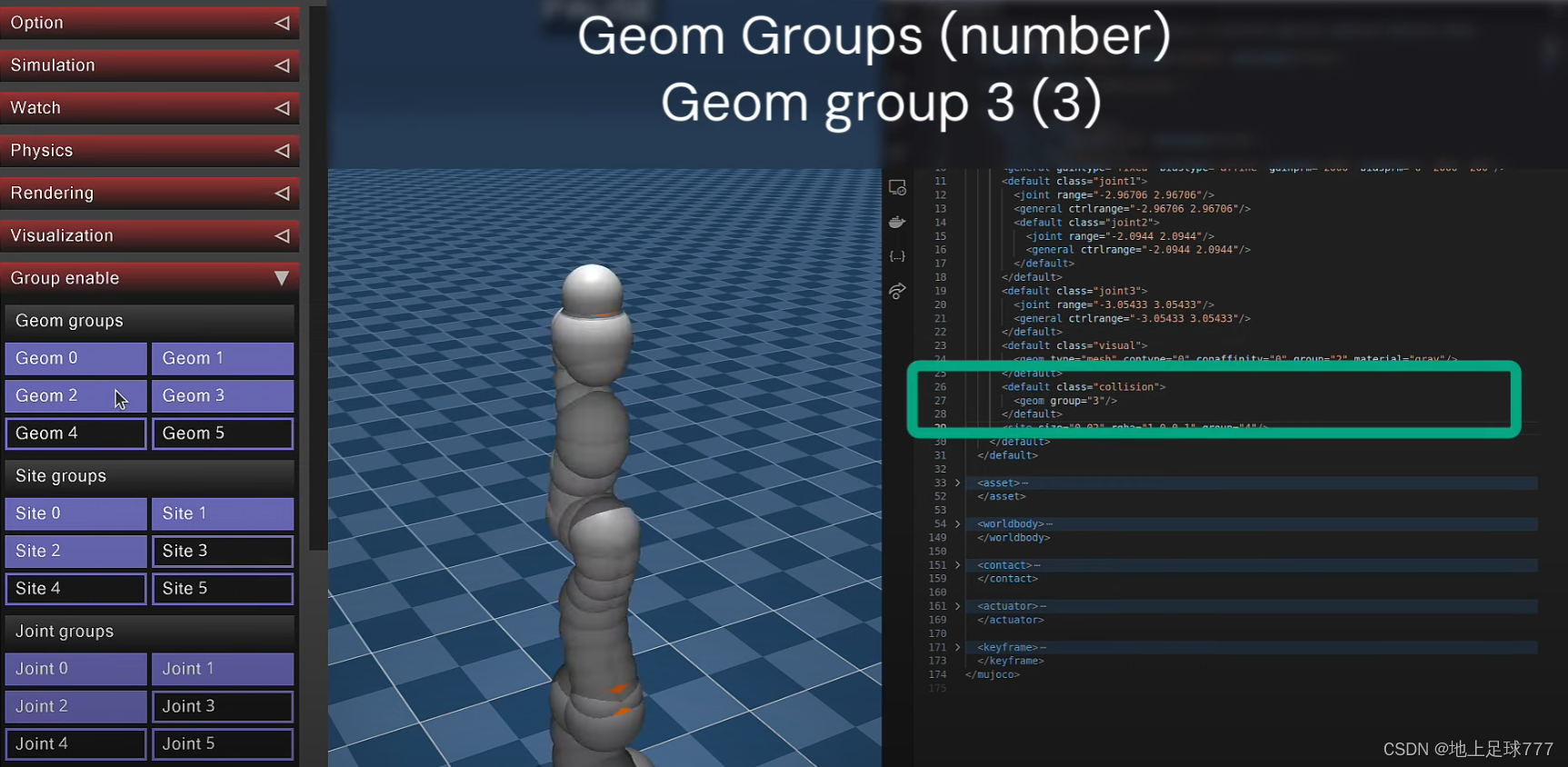
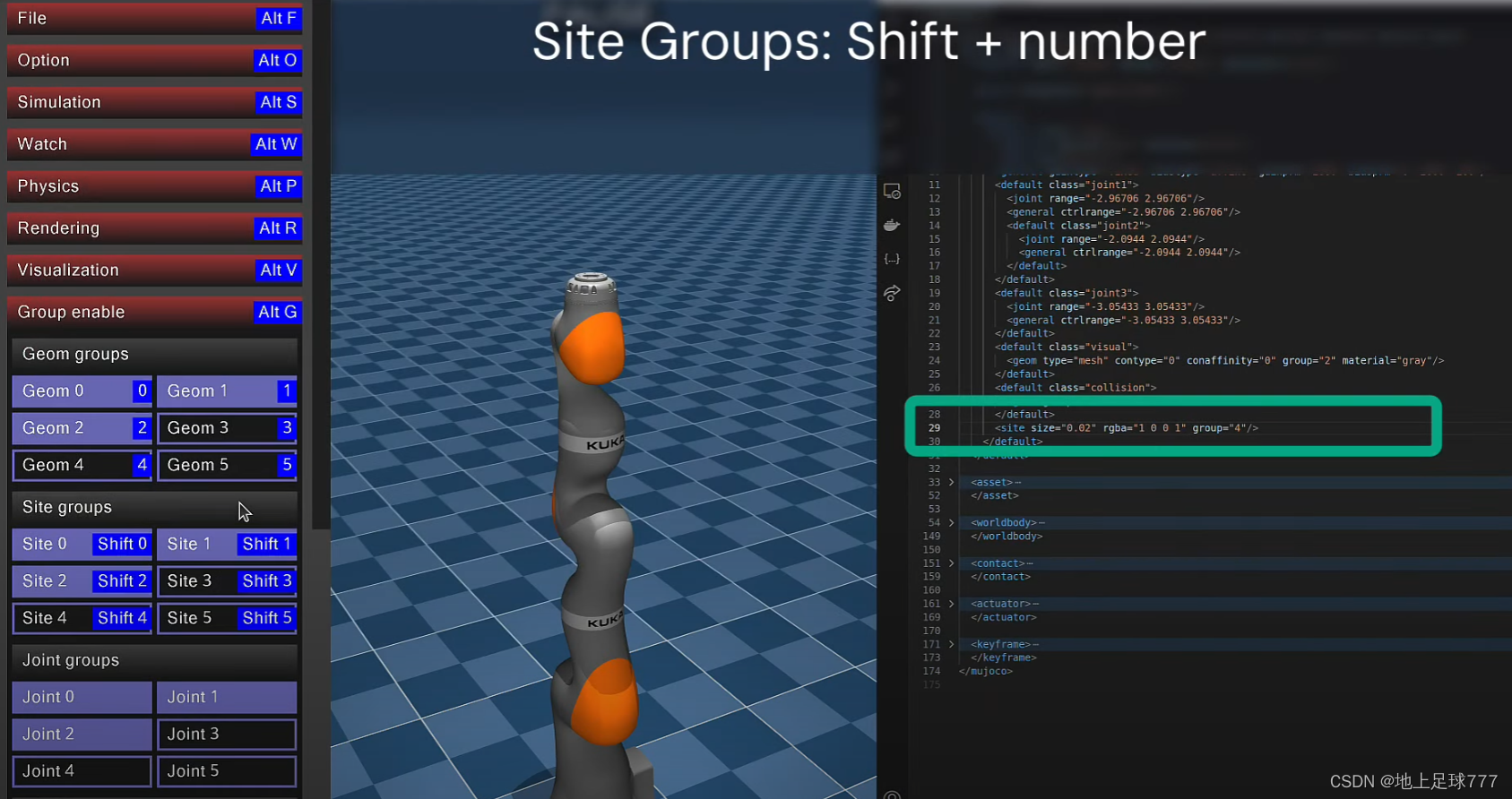
geom groups (number)
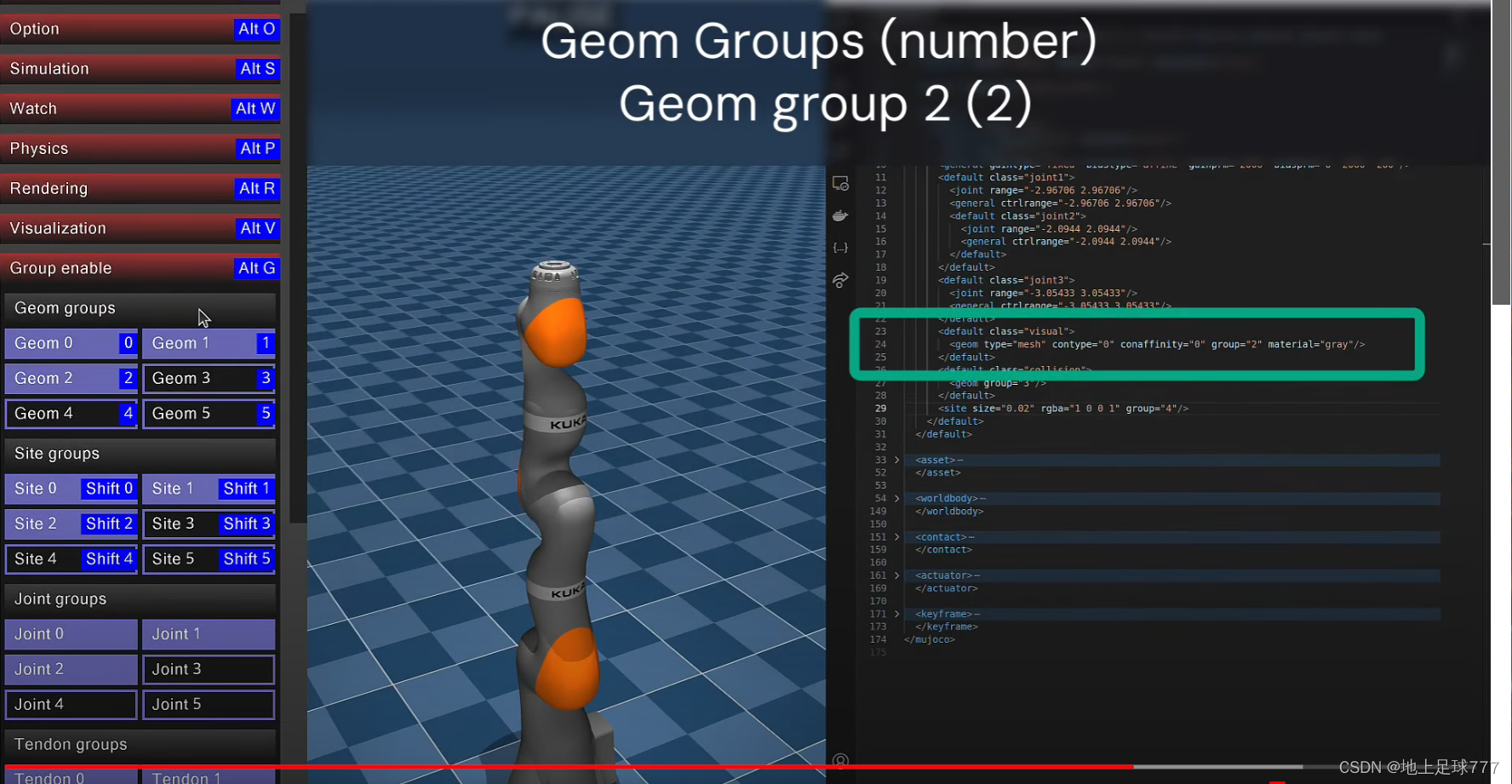
2是可视化部分
3是用于碰撞检测部分
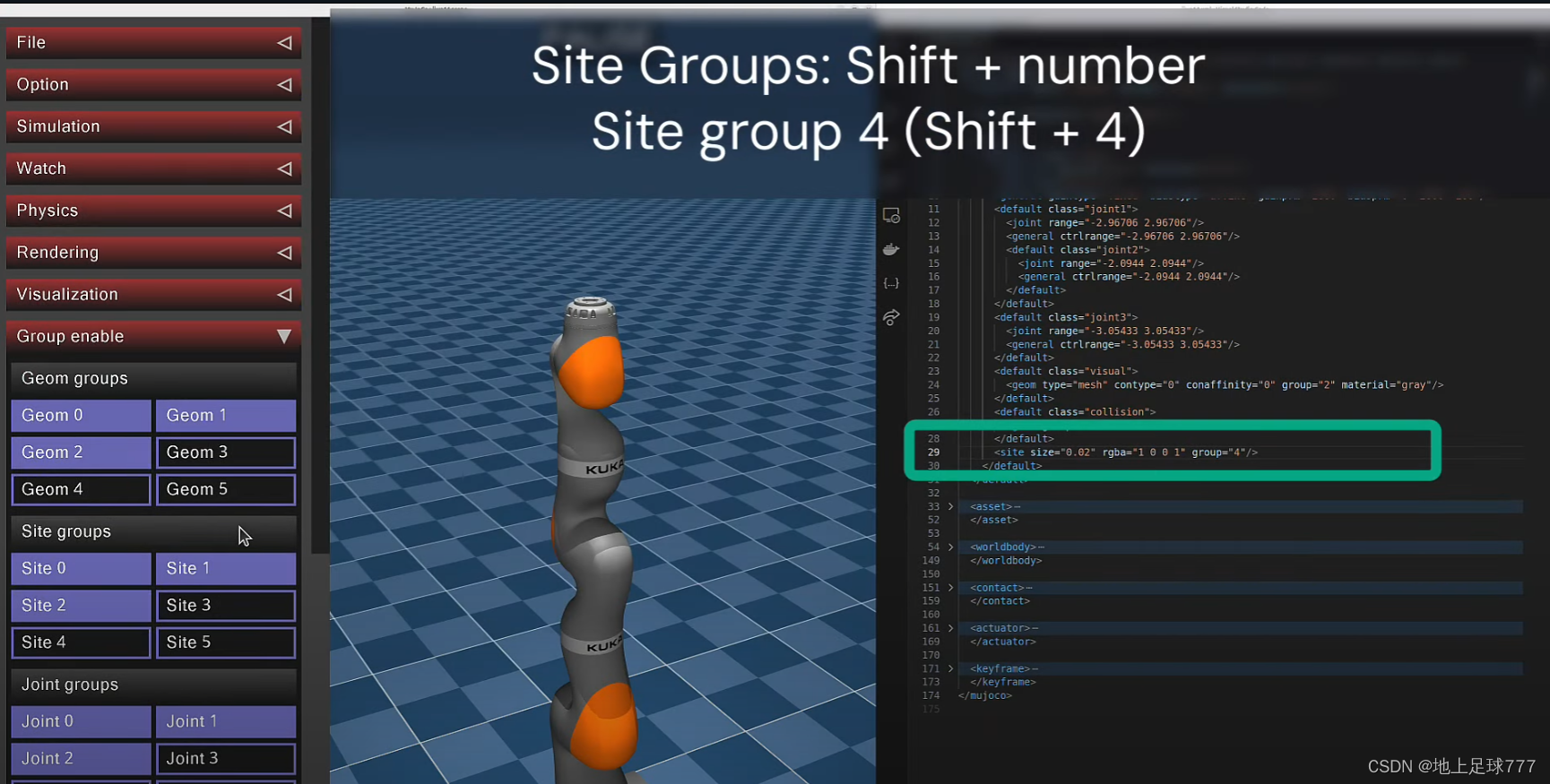
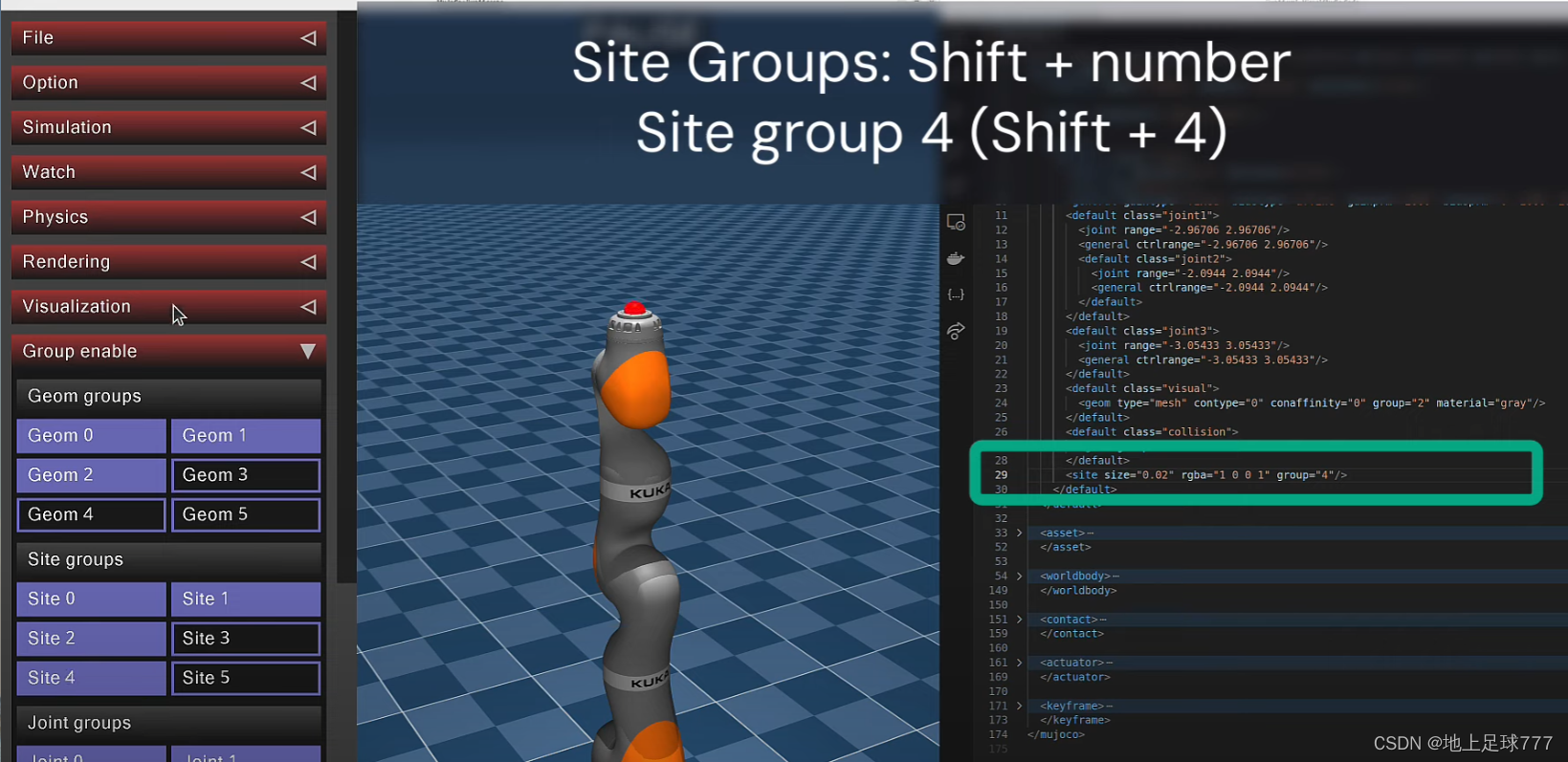
site group

constrains
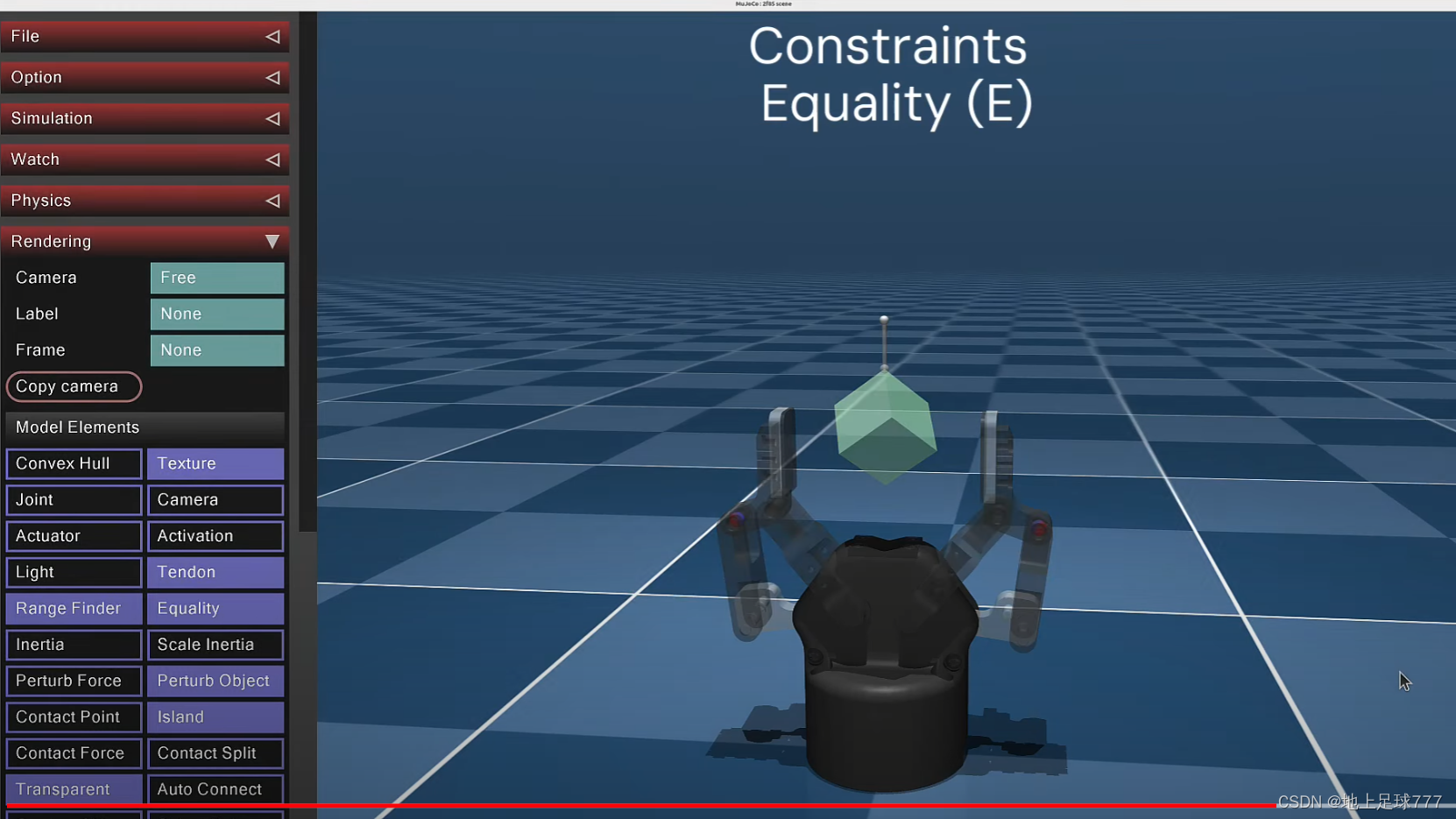
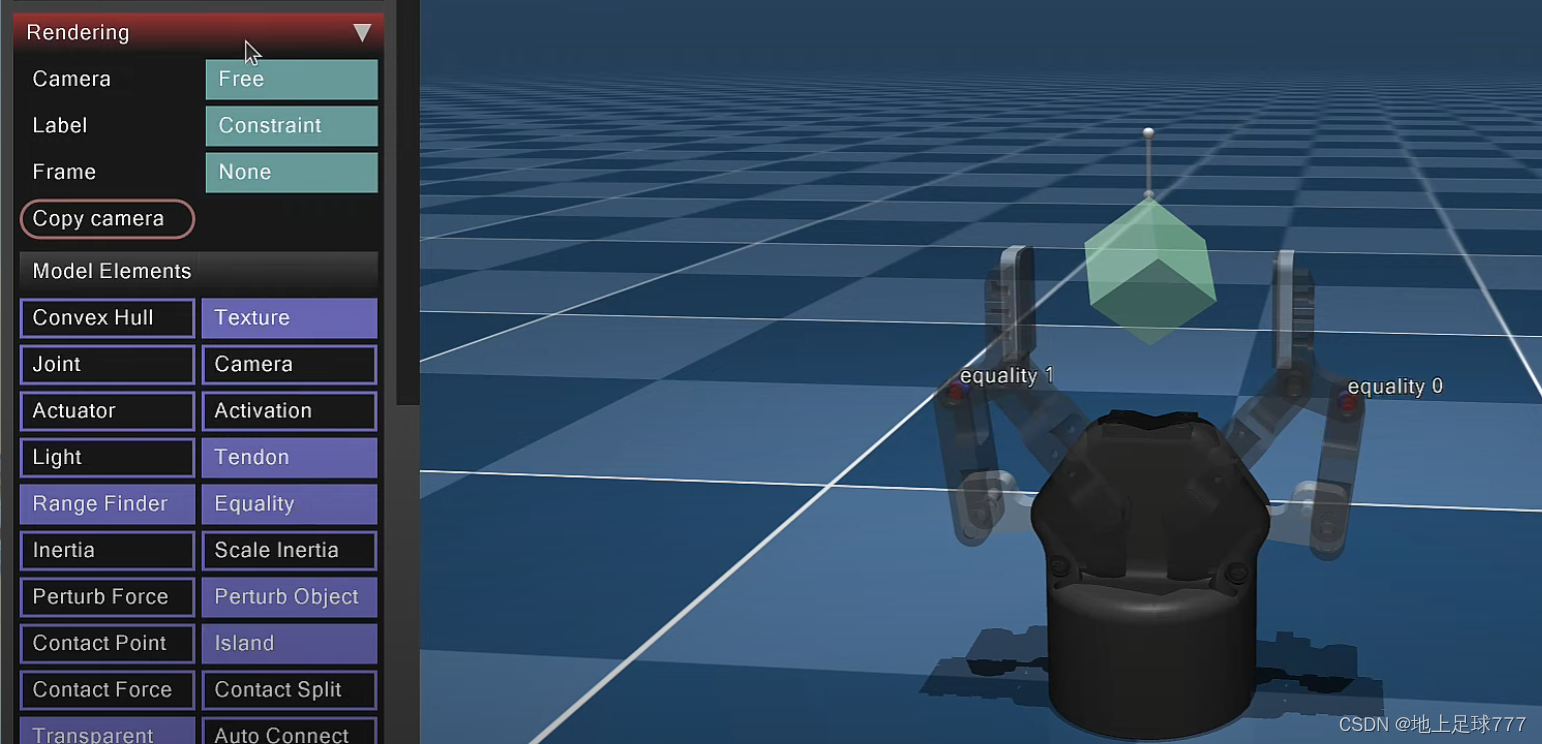
在physic一栏中
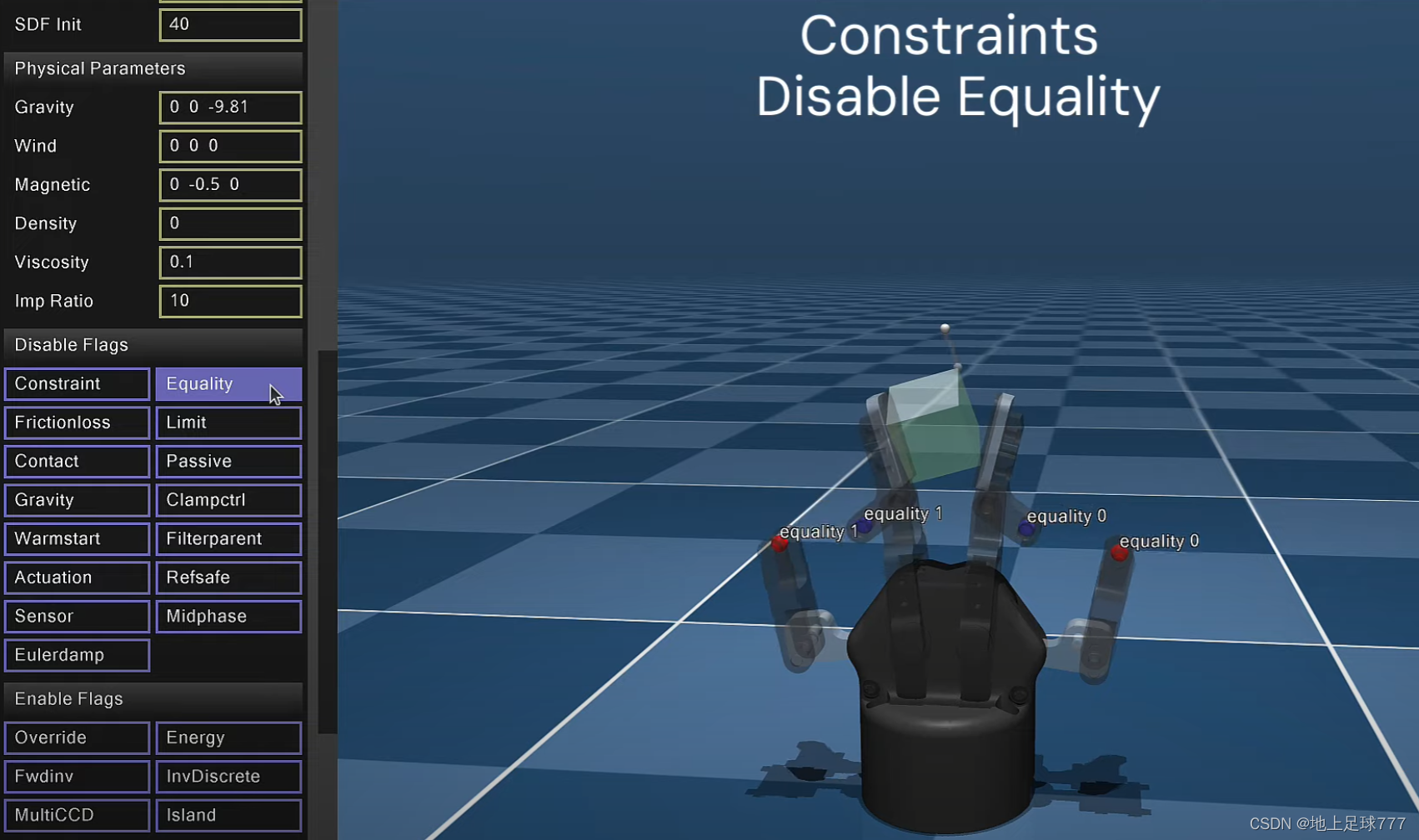

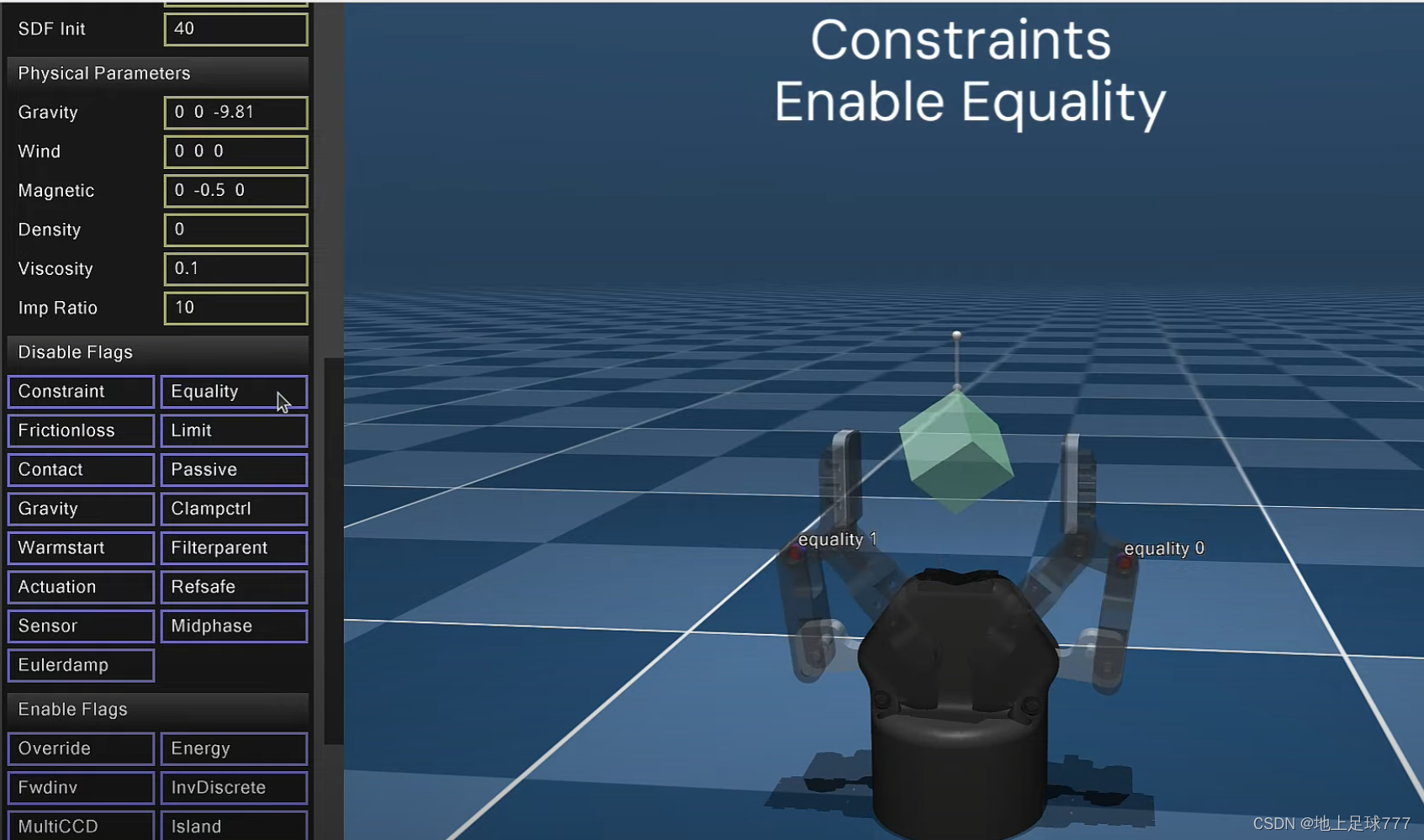
Equality Constraints
在 MuJoCo 中,“equality” 主要用于描述约束条件,特别是在多体动力学系统中。MuJoCo 是一种物理引擎,专门用于建模和仿真多体动力学系统,如机器人和其他复杂的物理系统。
-
Equality Constraints(平等约束):
- 在 MuJoCo 中,“equality” 通常指代一类约束条件,这些约束条件要求系统中的某些变量或部件满足特定的等式关系。这些约束可以是位置、速度、力或其他物理量上的等式关系,用于确保系统在仿真过程中遵循特定的物理规律或运动模式。
-
MuJoCo 中的应用:
- 在 MuJoCo 的建模语言中(如 XML 描述文件),可以定义各种类型的约束,包括平等约束。这些约束可以影响模拟的稳定性和准确性,因为它们确保系统在仿真过程中的行为符合物理定律和用户定义的规范。
-
示例:
- 例如,一个机器人的关节可能被定义为平等约束,这意味着关节的角度、速度或加速度必须满足特定的等式条件。这些条件可以通过物理模型和控制器来约束,以确保机器人模型在仿真中的运动符合预期的运动学和动力学特性。
总之,MuJoCo 中的 “equality” 主要用于描述仿真系统中的平等约束条件,这些约束对于精确建模和仿真复杂的动力学系统非常重要。
joint limit
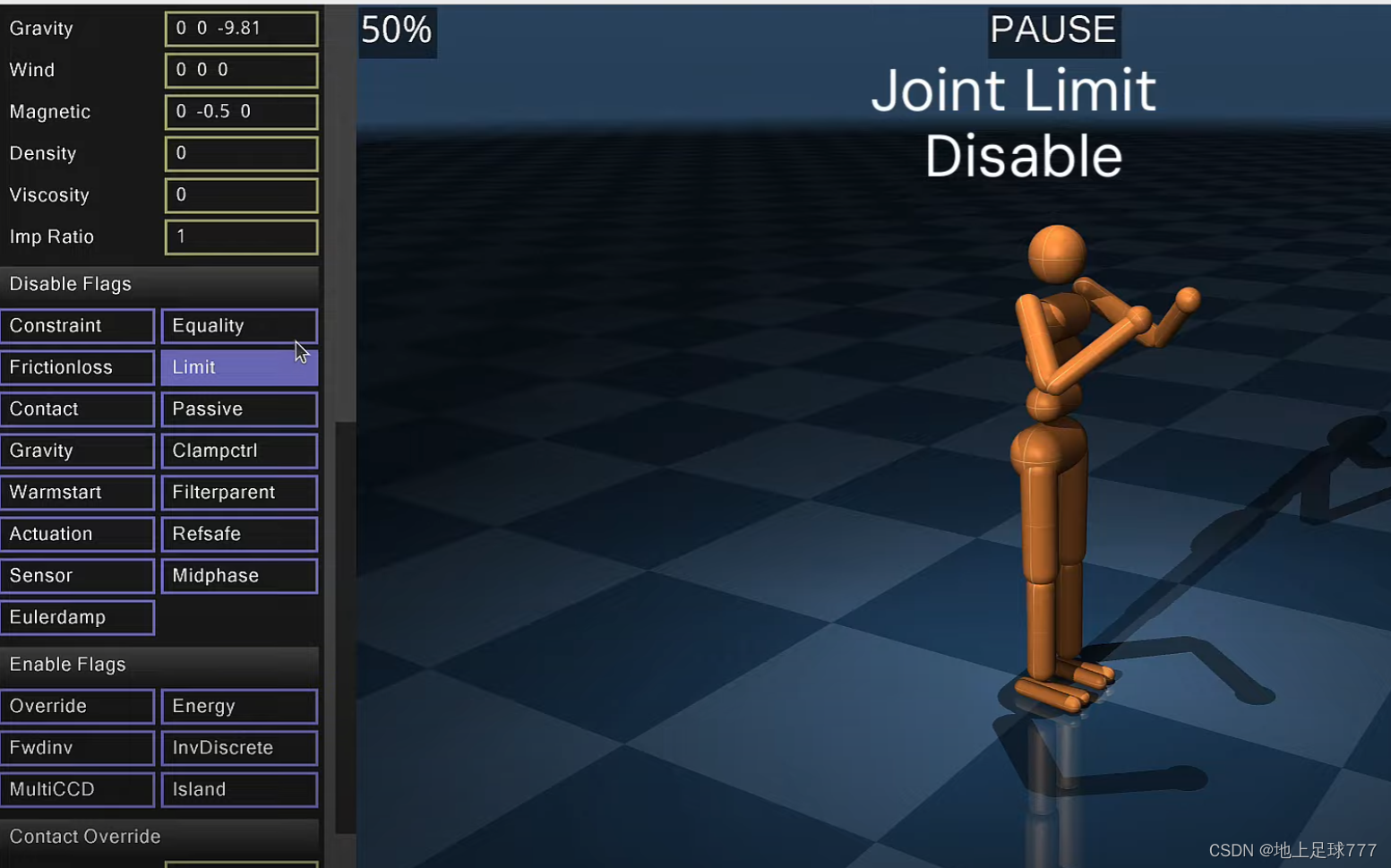
关节限制关闭 关节弯曲角度奇特
同样还有接触关闭, 人倒下会浮空
重力关闭
viscosity 粘度;(液体的)黏性,黏度
“Viscosity” (粘性)在物理学和工程学中有不同的应用和影响:
-
流体力学中的粘性:
- 在流体力学中,粘性指的是流体内部的摩擦阻力,它决定了流体内部流动的阻力大小。粘性越大的流体,其分子间的相互作用力越强,流动时产生的摩擦力就越大。这种摩擦力影响了流体的流动特性,如速度分布、压力分布和边界层的形成。粘性是流体阻力的一个重要来源,也影响了流体的动态行为和能量损失。
-
材料科学中的粘性:
- 在材料科学中,粘性通常指材料内部分子或原子之间的内聚力。这种内聚力导致材料在受力时具有一定的形变和变形能力,并影响了材料的力学特性如塑性变形和强度。材料的粘性会影响到其在工程应用中的可塑性、可加工性和耐久性。
-
控制系统中的粘性:
- 在控制系统中,特别是机械和液压系统中,粘性可以描述流体或液体在部件之间运动时的阻力。这种阻力直接影响了系统的动态响应速度和稳定性。通过控制粘性,可以调节系统的动态特性,如减少振动、改善响应速度和增加系统的精度。
总之,粘性在不同的领域和应用中具有不同的影响和作用,但其基本含义是指物质内部分子间的相互作用力,这种力量影响了物质的流动、变形或运动特性。
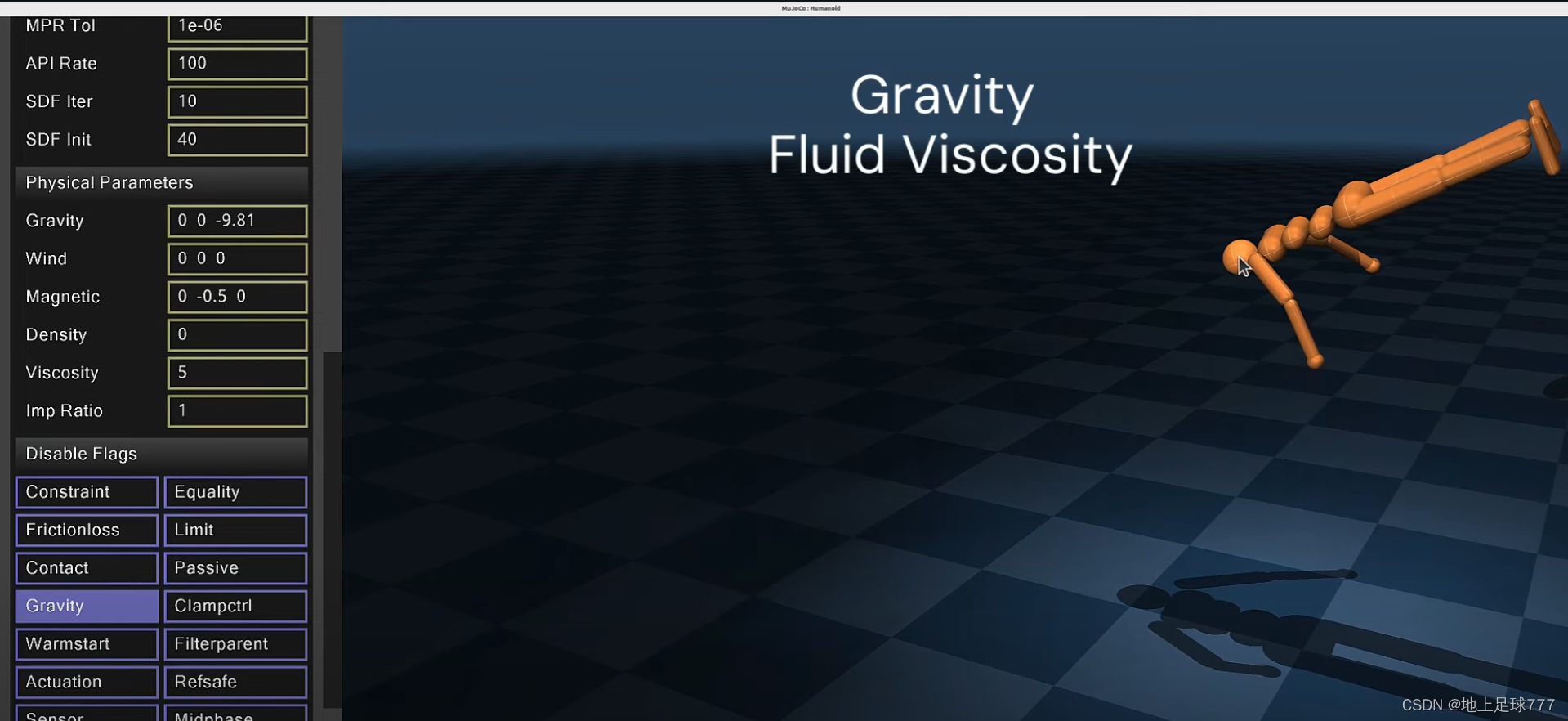
人处于浮空状态 重力 液体粘性 相互 抵消
在MuJoCo(Multi-Joint dynamics with Contact)物理引擎中,密度(density)和IMP(impedance)以及RADIO(radius)是涉及到不同物理特性的参数。
-
Density(密度):
- 在MuJoCo中,密度通常用于描述物体的质量分布。具体来说,MuJoCo中的密度参数用来计算物体的质量,这对于模拟物体在仿真中的惯性和动态响应非常重要。密度参数越高,物体在仿真中所表现出的惯性和动态特性就越高。例如,对于用密度定义的物体,MuJoCo会根据其形状和大小计算出质量。
-
Imp RADIO(阻抗半径):
- 在MuJoCo中,IMP RADIO通常用于描述接触模型中的参数。IMP RADIO实际上是MuJoCo中接触模型中的一部分,用于确定接触力的传递方式和物体间的碰撞反应。这个参数通常与物体表面的接触性质有关,包括接触点的大小和位置等。通过调整IMP RADIO,可以影响物体之间的接触力的传递方式和碰撞的表现。
总结来说,密度在MuJoCo中用于定义物体的质量分布,而IMP RADIO则用于描述接触模型中的参数,影响物体之间接触力的传递和碰撞模拟的准确性和真实性。


















 8404
8404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









