






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
模糊无人机控制器是一种利用模糊逻辑方法设计的无人机控制系统,旨在克服传统控制器在复杂环境下的性能限制。它通过模糊逻辑来处理输入与输出之间的模糊关系,以便更有效地控制无人机的运动。模糊无人机控制器基于模糊逻辑系统,其中包括模糊化、模糊规则、模糊推理和解模糊等步骤。模糊化将传感器数据转换为模糊集合,模糊规则定义了输入与输出之间的关系,模糊推理基于这些规则对控制动作进行推断,解模糊将模糊输出转换为具体的控制指令。模糊无人机控制器在无人机导航、避障、自主飞行等方面具有广泛的应用,可以提高无人机在复杂环境中的自主性、鲁棒性和适应性,是无人机技术发展中的重要研究方向之一。
📚2 运行结果
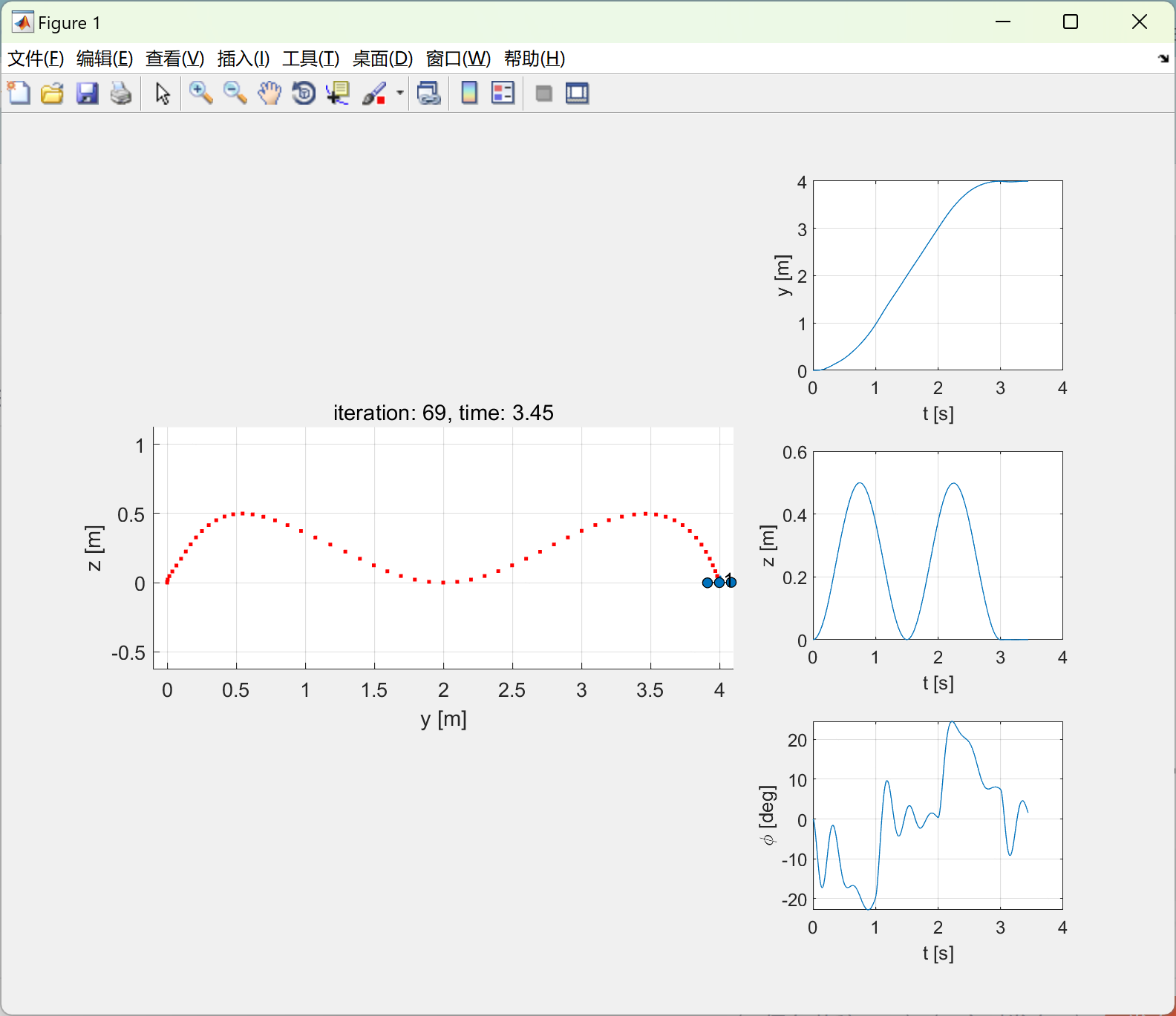
主函数部分代码:
clear;
close all;
addpath('utils');
addpath('trajectories');
controlhandle = @controller;
% Choose which trajectory
trajhandle = @traj_line;
trajhandle = @traj_sine;
[t, state] = simulation_2d(controlhandle, trajhandle);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]程玮,杨智玲.基于改进PSO的无人机精细化自主巡检航迹布设优化[J/OL].长春大学学报,2024(02):8-14[2024-04-07].http://kns.cnki.net/kcms/detail/22.1283.G4.20240402.1638.004.html.
[2]张河山,谭鑫,范梦伟,等.无人机高空航拍视角下小尺度车辆精确检测方法[J/OL].交通运输系统工程与信息:1-12[2024-04-07].http://kns.cnki.net/kcms/detail/11.4520.U.20240403.1121.004.html.















 145
145











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









