






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
🔥 内容介绍
在现代科技的快速发展下,机器人已经成为了人类生活中不可或缺的一部分。它们被广泛应用于工业生产、医疗保健、军事防卫等领域,为人们的生活带来了巨大的便利和效益。然而,要使机器人能够自主地执行任务,并做出智能的决策,就需要一个高效且可靠的控制算法。在这篇博文中,我们将介绍一种基于模糊Q学习的机器人控制算法,它能够使机器人在复杂环境中做出准确的决策。
模糊Q学习是一种强化学习算法,它结合了模糊逻辑和Q学习的优点。Q学习是一种通过学习价值函数来进行决策的方法,它通过不断更新状态-动作对的Q值来寻找最优策略。而模糊逻辑则是一种能够处理不确定性和模糊性的数学工具,它可以将模糊的输入映射到模糊的输出。模糊Q学习算法将这两种方法相结合,使机器人能够根据环境的模糊输入做出准确的决策。
在模糊Q学习算法中,机器人首先需要建立一个模糊化的状态空间和动作空间。状态空间包括了机器人所处的环境的各种状态,如位置、速度、角度等。动作空间则包括了机器人可以执行的各种动作,如前进、后退、左转、右转等。接下来,机器人需要定义一组模糊规则,这些规则将模糊状态和动作映射到一组模糊的Q值。机器人通过不断更新这些Q值来学习最优策略,并根据当前的状态选择最优的动作。
模糊Q学习算法的核心是模糊推理和模糊控制。模糊推理是指根据当前的模糊状态和模糊规则,通过模糊推理引擎来计算出模糊的Q值。模糊控制则是指根据当前的模糊Q值,通过解模糊运算来选择最优的动作。解模糊运算可以使用一些常见的方法,如最大值法、平均值法等。通过不断地模糊推理和模糊控制,机器人能够逐渐学习到最优的策略,并在复杂环境中做出准确的决策。
模糊Q学习算法的一个优点是它能够处理模糊的输入和输出。在现实世界中,机器人所感知到的信息往往是模糊的和不确定的。模糊Q学习算法能够通过模糊推理和模糊控制处理这些模糊的输入,从而使机器人能够在不确定的环境中做出准确的决策。此外,模糊Q学习算法还能够适应不同环境和任务的需求,只需要重新定义模糊规则和动作空间即可。
然而,模糊Q学习算法也存在一些挑战和限制。首先,模糊Q学习算法需要大量的计算资源和时间来进行模糊推理和模糊控制。在复杂环境中,机器人需要处理大量的状态和动作,这会导致算法的计算复杂度和学习时间的增加。其次,模糊Q学习算法对模糊规则的设计和调整非常敏感。不合理的模糊规则会导致算法的性能下降,甚至无法收敛到最优策略。因此,在设计模糊规则时需要充分考虑环境和任务的特点,以及机器人的能力和限制。
综上所述,基于模糊Q学习的机器人控制算法是一种能够使机器人在复杂环境中做出准确决策的方法。它通过结合模糊逻辑和Q学习的优点,处理模糊的输入和输出,并适应不同环境和任务的需求。然而,该算法也面临一些挑战和限制,需要充分考虑环境和任务的特点,以及机器人的能力和限制。随着科技的不断进步和算法的改进,相信基于模糊Q学习的机器人控制算法将在未来发挥更大的作用,并为人类带来更多的便利和效益。
📣 部分代码
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行
%% 导入数据
res = xlsread('数据集.xlsx');
%% 划分训练集和测试集
temp = randperm(357);
P_train = res(temp(1: 240), 1: 12)';
T_train = res(temp(1: 240), 13)';
M = size(P_train, 2);
P_test = res(temp(241: end), 1: 12)';
T_test = res(temp(241: end), 13)';
N = size(P_test, 2);
%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);
t_train = ind2vec(T_train);
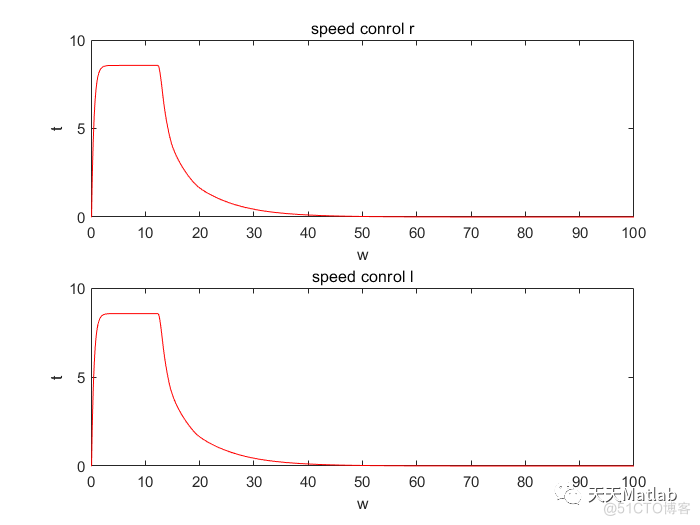
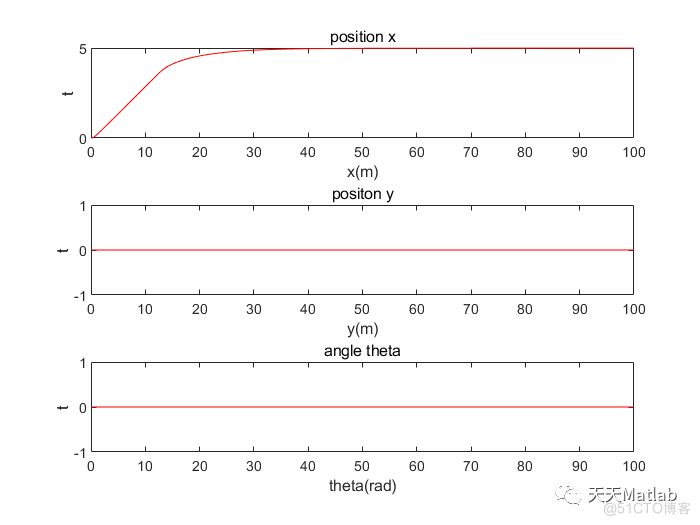
t_test = ind2vec(T_test );⛳️ 运行结果
🔗 参考文献
[1] ZHAO HongkunDOU ZhongyuLONG Chengwan.基于模糊微分先行PD算法的移动机器人轨迹跟踪控制[J].河南科技, 2018, 000(032):26-28.
[2] ZHAO Hongkun,DOU Zhongyu,LONG Chengwan.基于模糊微分先行PD算法的移动机器人轨迹跟踪控制[J].河南科技, 2018(032):000.















 3970
3970











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









