







4D毫米波雷达系统方案
附赠自动驾驶最全的学习资料和量产经验:链接
4D毫米波雷达的性能比一般的“3D”雷达要高,体现在距离远,精度高,角分辨率高等方面。
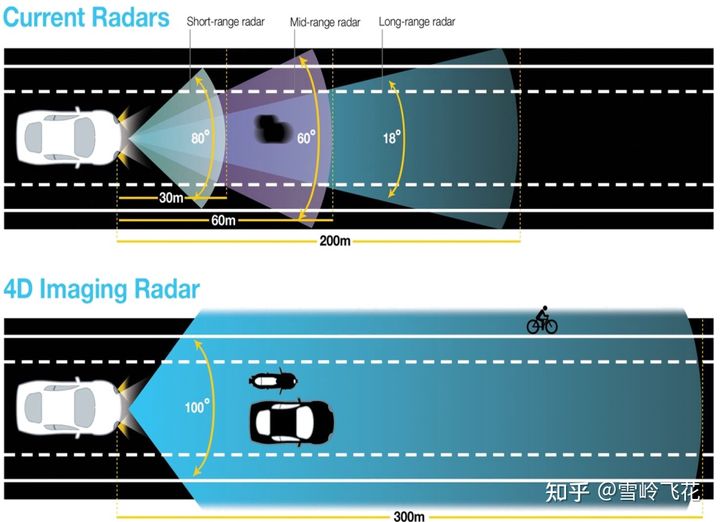
那么4D成像毫米波雷达是如何做到的呢?
本篇文章从雷达指标方程上进行简要的解释,以及介绍一下主流的4D毫米波雷达系统方案。
1. 雷达关键指标方程
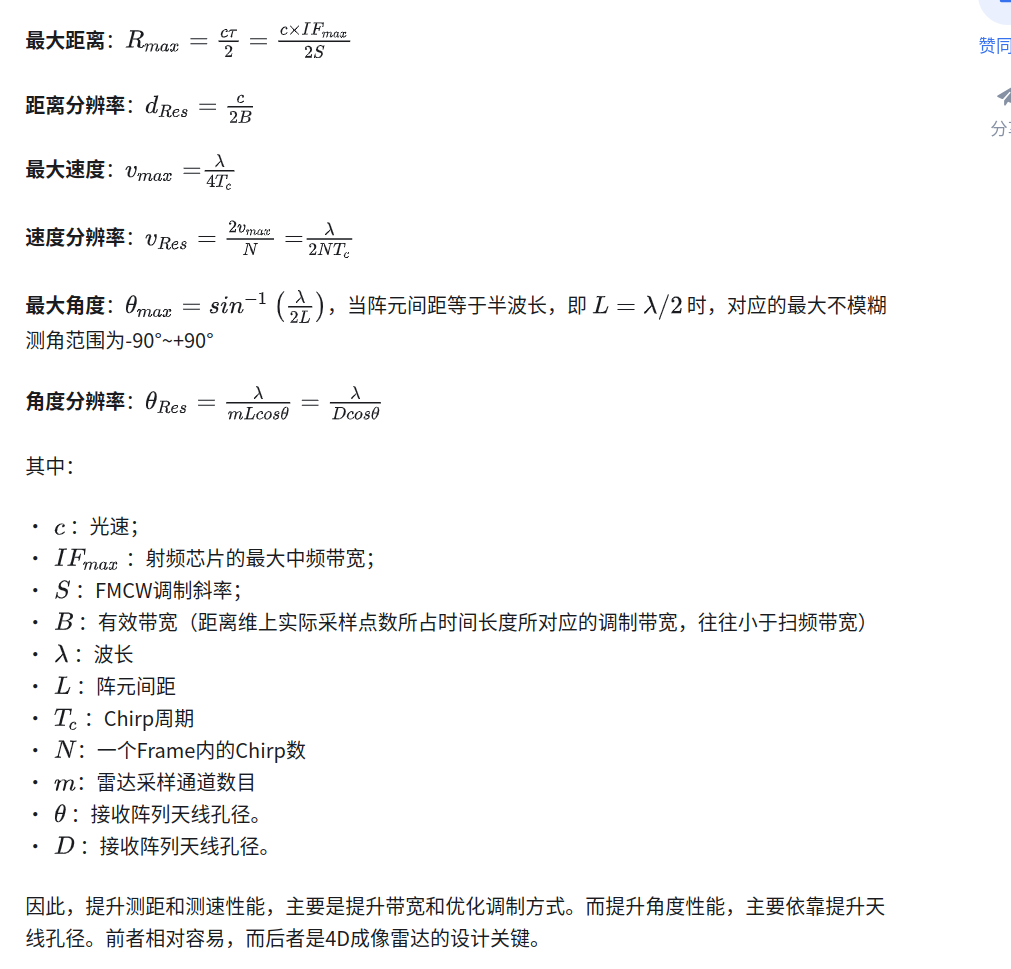
根据雷达探测原理和雷达方程,毫米波雷达的6个关键指标公式如下:
2. 为什么必须要增大天线孔径
如果让雷达波束尽可能窄,配合扫描机构实现一定范围内的扫描,就可以实现高的角分辨率。
没错,这就是目前自动驾驶领域的当红炸子鸡——Lidar(当然更严谨来说,是ToF扫描激光雷达,不是Flash或者FMCW激光雷达):
00:06
然而,这对于毫米波雷达是极为困难的。
原因是,毫米波点源天线的辐射是趋近于球面波的,必须要通过对天线进行设计,才能缩小其波瓣宽度,同时增加天线增益,提升辐射距离。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8431
8431

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









