







编码器分类
- 霍尔编码器(磁式)
- 光电编码器(光学式)
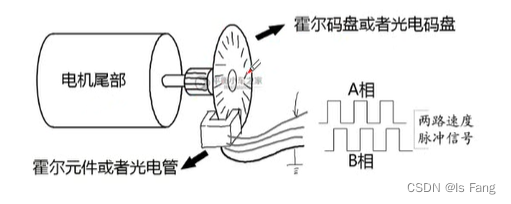
- 光电编码器容易收到环境光影响
产品参数
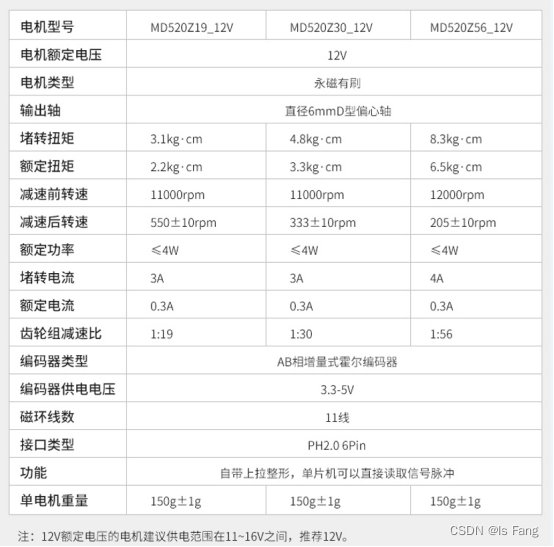
- 电机的额定电压为12V,则TB6612FNG电机驱动的VM口一般也是12V
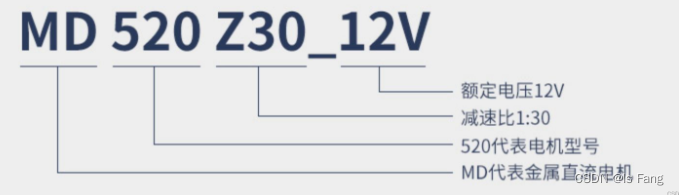
电机型号说明
电机选型
在减速电机内部马达不变的情况下,减速箱内齿轮减速比与转速和扭矩之间的关系
| 减速比 | 转速与扭矩 | 适用情况 |
|---|---|---|
| 1:19 | 高转速,低扭矩 | 竞速类小车 |
| 1:30 | 转速适中,扭矩适中 | 平衡车 |
| 1:56 | 低转速,大扭矩 | 越野车 |
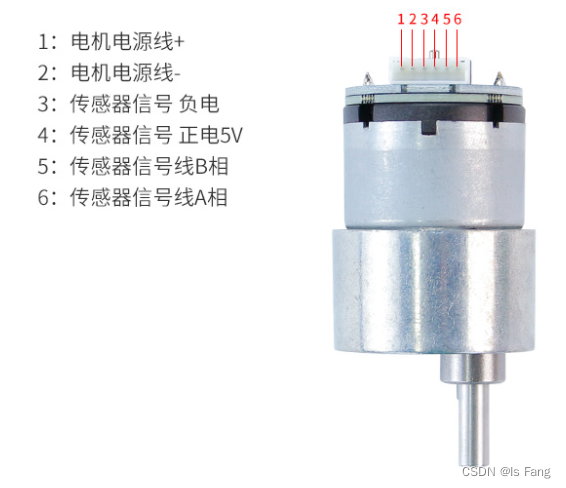
接线说明
为什么使用直流减速电机
- 降低电机速度
- 提高输出扭矩
减速电机速度和扭矩根据减速比进行换算
编码器输出说明
编码器接口测速
-
编码器接口测速的使用场景:使用PWM驱动电机,再使用编码器(无接触式的霍尔传感器或光栅)测量电机速度,再用PID算法实现闭环控制
-
电机测速使用双输出的正交霍尔编码器输出,这种旋转编码器不仅可以测量速度还可以测量旋转方向,编码器的两组A/B输出相位差90度的300个双相脉冲。想要使用脉冲信息测量速度,首先使用定时器定时50ms。编码器转一圈会发送脉冲,一个脉冲可以产生一个中断,在中断函数里令一个变量自加,每产生一个脉冲总脉冲数就加一。之后用脉冲数/300就可得到在这50ms内电机转动得圈数,乘以20就是每秒钟转的圈数。

















 838
838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









