







 本文详细介绍了基于51单片机的倒车雷达系统设计,涉及AT89C51单片机的硬件配置、超声波模块、LCD1602液晶显示屏的控制、报警电路及软件仿真。作者分享了从硬件选择到软件调试的实际步骤和解决遇到的问题。
本文详细介绍了基于51单片机的倒车雷达系统设计,涉及AT89C51单片机的硬件配置、超声波模块、LCD1602液晶显示屏的控制、报警电路及软件仿真。作者分享了从硬件选择到软件调试的实际步骤和解决遇到的问题。
序
🔥 毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是:基于51单片机超声波的倒车雷达系统设计
3 系统硬件设计
3.1 AT89C51单片机及其最小系统
本文的设计是依据单片机的超声波液对检测系统的重新设计,它的核心控制器使用的是AT89C51控制芯片来当作核心的控制器。在这之中AT89C51单片机一共有40个引脚,它的电路所有的引脚图按3-1所示。单片机一共有4个位,包括有P0、P1、P2、和P3这样的总位端口,并且他们均有8个IO口,比如P0之中就含有P0.0-P0.7这样的8个端口,并且可以单独控制每个端口。在这之中P3,P2,P1的端口均有内部的上拉电阻限制,所以能够直接利用,不需要再外部接电阻然后才有上拉的功能,因此P0口的内部并没有自带的上拉电阻,因此在使用功能的时候,如果需要用到P0端口,则需要在P0口的8个端口每个IO口都外接一个5k-10k的电阻,来进行上拉作用,以此才能正常使用,上拉电阻的另一端接地。
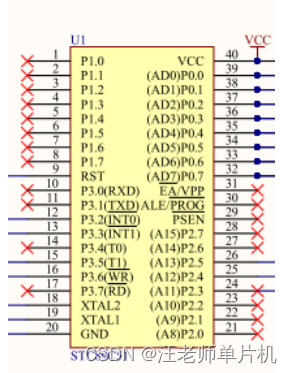
图3-1 AT89C51单片机引脚图
3.1.1 晶振电路
AT89C51单片机晶振电路由一个11.0592MHz的插件晶振元件和两个30pf的电容来构成。他们连接按照如图3-2所示。单片机的两个引脚18和19依次是XTAL2与XTAL1引脚,也就是时钟脉冲的引脚,其引脚依次连接与11.0592兆赫兹晶振的两头,这两电容的一个端口也依次与晶振相互连接电容的另一端进行接地[10]。也就这样构成了晶振时钟的脉冲电路,这一电路是要为单片机供给时钟脉冲,使得单片机延时和定时器计数器和中断等功能的正确实现。
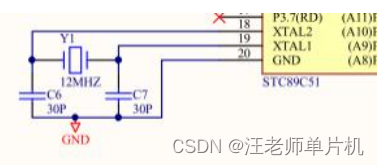
图3-2 晶振电路
3.1.2 复位电路
本系统中的单片机复位电路利用一阻值是3k的打电阻与一容值是4.7uf的电容系统来构成,电容之间两端通过并联形成同一按键,这也就是按键系统的复位按键,是用来避免系统死机以至于没有办法实现功能复位[11]。单片机复位电路的电路原理图如图3-3所示。
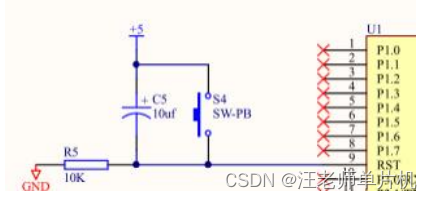
图3-3复位电路
3.2 HC-SR04超声波模块测距模块
3.3.1 HC-SR04超声波模块
HC-SR04的超声波模块包括两个共用的压电陶瓷的超声传感器,同时给以外围信号的处理电路来组成。这两个压电的陶瓷超声的传感器,其中一个是用来输出超声波的信号,另一个是用来收到反射之后的超声波的信号。因为发出与接收信号都相对较弱,因此要利用外围的信号放大器来增大发出的信号功率,以及把将回来的信号对其放大,以能更稳定地将信号传输给单片机。
模块电器的主要参数:
·使用的电压:DC---5V
·静态的电流:小于2mA
·电平的输出:0-5V
·感应的角度:不大于15°
·探测的距离:2-450cm
·高精度:0.2cm
3.3.2超声波模块的控制
波是能在弹性介质中及逆行传播的机械纵波。依据线性声学的原理,定义声波产生过程中的物理过程描述如下:把一个连续的弹性介质当作是由很多紧密相互连结的质点所构成的。如果外界产生对弹性介质中的质点一定的扰动时,质点就会产生一种能够将其偏离其平衡位置的一种相对运动,这一类的运动将推动与质点相邻的其他质点产生运动。之后,因为介质具有回弹,这些颗粒会一个接一个地回到原来的平衡位置。在惯性的影响下,这些粒子不会再停留在原来的平衡位置,而是会在相反的位置重现上述状态。因此,介质中的质点围绕它们各自的平衡位置,一个接一个地来回移动,把这种来回移动的形式变成了一种波形,并传播到更远的介质中。,形成了波动。一般来说,人类的听觉系统只能接收到20Hz~20KHz的媒质扰动,人类将这种机械波称为声波,而把低于20Hz的声波称为次声波,反之,高于20KHz的声波被称为超声波。
通常情况下,声波具有三种形态:
1.纵波:纵波在固液态三体中传播之时,质点的进行传播的方向与振动方向是一样的。
2.横波:横波的传播方向是和纵波相反的,横波是指的质点再传播的方向和振动反向移动的波,而且这种波就只能可以在固体中进行传播;
3.表面波:表面波是不同于纵波和横波两种波形的一种特殊的机械波,它更像是横波和纵波的综合机械波。这一系统的超声波可以在多个领域之中起到很多的应用,有一个原因是超声波拥有以下几个特点:1.超声波是反射能力强并且是直线传播的机械波。
2.超声波具有非常强大的穿透能力:超声波再固体和液体中传播的时候,受干扰能力较强,不容易隔绝,波形更稳定,可以传到更远的距离。
3.与相同振幅的声波和次声波相比,超声波包含的能量更强:超声波如果具有更高的频高,对应的光束越窄,穿透能力以及定向传播的能力也就愈发的强。
为了利用超声波测量车速,依旧要研究超声波的测距模块它的工作原理。超声波测距模块是一类利用超声波来传输信息的介质。它能够把其他形式的能量转换为需要的频率的超声波能量。超声波能转化为其他形式的能量。
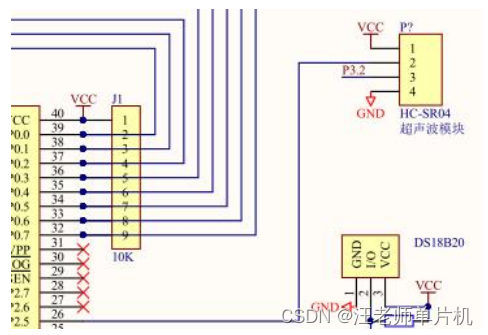
图3-4 HC-SR04超声波测距模块电路连接图
3.3 测距显示电路设计
3.3.1 LCD1602液晶显示屏
LCD1602液晶显示器可以显示字符,它通常用于信息从单片机从内向外的展示。它能够具有2行16字的编程方法,其有着微功耗,显示丰富,成本低廉,轻薄这一系列的优势,而且低功耗、袖珍式仪表的再应用中得到了十分多的投入使用,设计上拥有11指令,通过对寄存器控制可以直接实现这11个指令,包括清屏,读写等,方便程序设计时的简易化。
特点:
·3.3V以及5V工作电压,对比度可以进行条件
·内部含有复位的电路
·负责各类的控制命令,例如:清屏、闪烁字符、闪烁光标、移位显示着一些功能。
·其中含有80字节的数据存储器DDRAM
·其内部具有192个5×7点阵的字型字符产生器CGROM
·8个可灵活进行自定义的5×7的字符发生器CGRAM
与其他的液晶显示屏进行比较,LCD1602的特征有着功耗低、体积小、显示丰富、轻薄,都能被利用在精密仪器和低功耗的系统中[13]。
3.3.2 LCD1602的并行控制
1602采用标准的16脚接口,其中:
第1脚:VSS为电源地
第2脚:VCC接5V电源正极
第3脚:V0为液晶显示器对比度调整端,接正电源时对比度最弱,接地电源时对比度最高(对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度)。
第4脚:RS为寄存器选择,高电平1时选择数据寄存器、低电平0时选择指令寄存器。
第5脚:RW为读写信号线,高电平(1)时进行读操作,低电平(0)时进行写操作。
第6脚:E(或EN)端为使能(enable)端,高电平(1)时读取信息,负跳变时执行指令。
第7~14脚:D0~D7为8位双向数据端。
第15~16脚:空脚或背灯电源。15脚背光正极,16脚背光负极。
本系统的仿真图中,可以通过按下滑动变阻器的增加距离和减小距离,来模拟实际的测距,并将距离显示在LCD1602液晶屏上。另外,系统之中还有温度检测的功能,利用温度的传感器,进行对环境温度的检测,并且同样能够显示在LCD1602的液晶屏之上[14]。温度也是可调的,可以通过调节仿真图中的温度检测模块,来模拟实际的温度变化,液晶屏上的数值会根据测量结果的变化而变化。
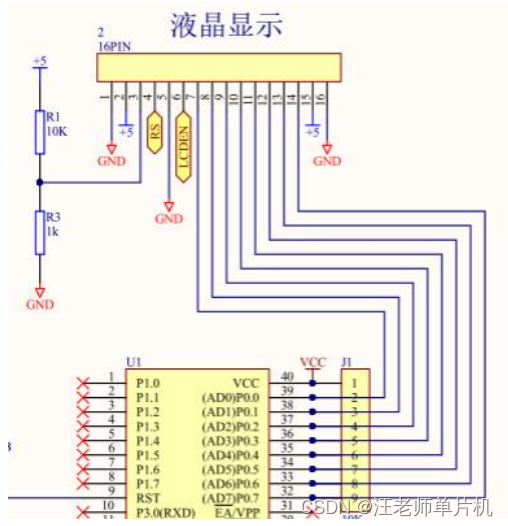
图3-5 LCD1602液晶模块
3.4 报警和设置电路
3.4.1 蜂鸣器报警电路
通过对HC-SR04超声波测距模块的设置,设定安全距离,将数值反馈至蜂鸣器报警电路中。当距离缩短至设定值,蜂鸣器将收到一高电平,从而发出声音来进行报警。
蜂鸣器报警电路如图3-6所示,蜂鸣器的一端接电源5v正极,另一端接一个单片机P2.2引脚。当超声波测距传感器检测距离液位少于最开始的设定值的时候,单片机能够为PNP三极管的基极提供一个低电平,和蜂鸣器的电路相互连接,蜂鸣器鸣笛,从而起到告知使用者液位已经快要超标的通知作用的功能。
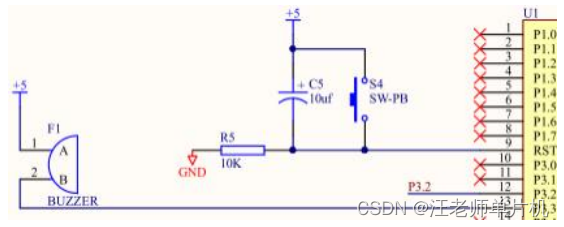
图3-6 蜂鸣器报警电路
3.4.2 按键设置电路
系统可以通过控制台的按键,来调整倒车安全距离,报警阈值设置电路如图3-7所示。当车尾距离车尾后面物体距离小于设置的距离,系统蜂鸣器会鸣笛。控制台包括2个按键,一个是功能键,另一个是调整键。功能键的作用是设置启动,按下功能键之后,系统会启动调整安全距离。调整是一位一位地进行调整的按下功能键,开始从左到右调整,先是第一位的数值,每按一下调整键该位数字就加一,加到9之后归零,然后再加一,以此循环,直到再次按下调整键[15]。再次按下调整键,第一位就确认和保存了。然后进入下一位的设置,方法同第一位一样。设置好之后,这个数值显示在LCD1602液晶屏的右下角。
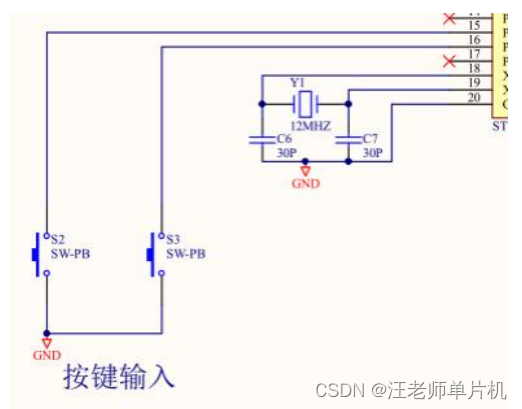
图3-7 报警阈值设置电路
5 软硬件综合调试
5.1 PROTEUS绘图软件
我们进行电路绘制和调试运行时使用的是一款简单实用的EDA绘图软件,这一款绘图软件是英国LabCenterElectronics公司所研发被称为Proteus的一款绘图软件[18]。这样的一款EDA绘图软件在拥有能够绘制原理图以及仿真调试的功能的同时,其还能够绘制出一份与原理图相对的PCB图文件,将原理图、仿真运行和PCB图三大功能三合一做成一个软件,非常地先进和方便。
PROTEUS绘图软件是一个有极其丰富功能的仿真绘图软件,这一款仿真软件除了能够实现原理图的绘制,而且可以实现芯片程序的加载和运行过程的模拟和测试,还能实现原理图转成PCB制板图的功能,功能十分强大。其软件界面,如图5-1所示。在最上面所显示是图纸被保存所在的文件夹的名称,左边的是工具栏以及元件这一类信息的加载与显示。它的主界面显示的是电路图的绘制、显示以及模拟运行的位置,主界面与文件夹之间呈现的是界面的工具栏。
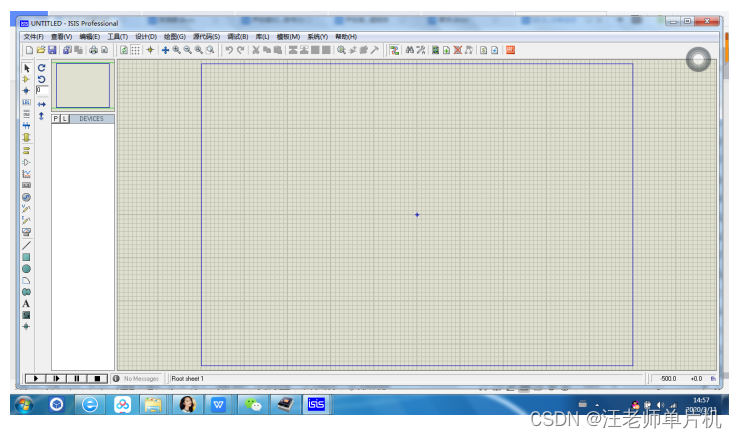
图5-1 PROTEUS绘图软件界面
5.2 电路绘制过程
电路图的绘制过程是,先在纸上画出要实现功能的每部分的分电路,想清楚每部分分电路需要实现的功能,然后根据功能检查各个分电路是否正确。都无误之后,就在纸上将各个分电路之间的逻辑关系理清楚[19],然后在纸上画出整理出来的系统总电路图,然后根据纸上画的总电路图,在EDA仿真软件PROTEUS绘图软件上画出系统的整体电路的仿真图,然后检查电路图,接着对照电路图对系统进行编程。
5.3 仿真原理图
基于单片机的倒车雷达系统在进行运行的开始阶段的仿真图如图5-2所示。期主要是单片机的最小系统,液晶的显示模块、按键的设置模块还有声光报警模块。
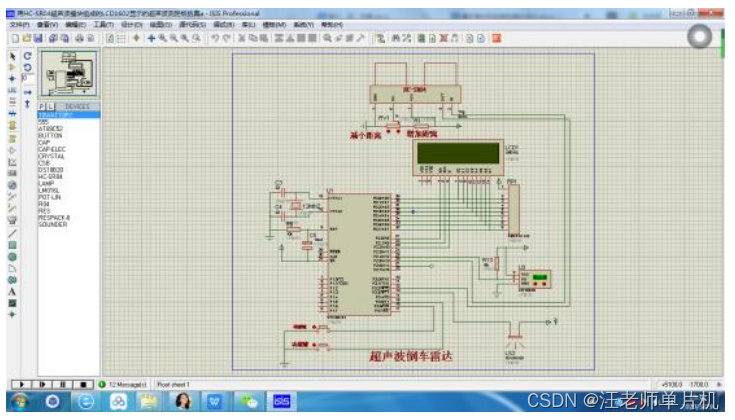
图5-2 系统运行之前的仿真图
如下图5-3所示为本系统的仿真运行图,当开始运行仿真的时候液晶屏开始显示超声波模块检测到距离数据,此时可以通过调节滑动变阻器可以达到改变超声波检测距离的功能。当检测到距离数值超过设定的阈值时系统开始进行声光报警,检测到的距离数值越小声光报警的频率越高。除此之外系统的阈值可以根据功能按键进行设置。
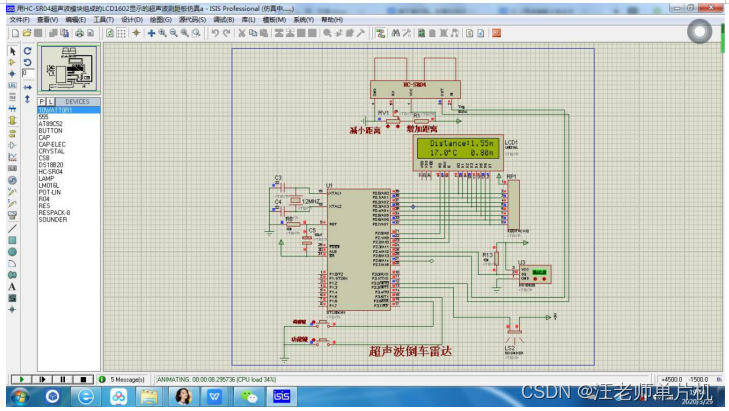
图5-3 系统开始运行的仿真图
5.4 出现的问题
整个设计的制作过程,并没有遇到太大的困难,不过也有一些小错误。例如,程序代码中有些逻辑语句使用错误,通过软件编译,找到其错误代码的行数,然后进行分析和修改,直到编译成功为止[24]。我们在电路图的绘制过程和程序的编写过程中,出现过很多的问题。例如,一开始驱动蜂鸣器用的是单片机控制三极管,然后三极管来驱动蜂鸣器[25]。但是一直没有调通。后来选择用单片机直接控制蜂鸣器,结果就调通了。而且效果非常好。
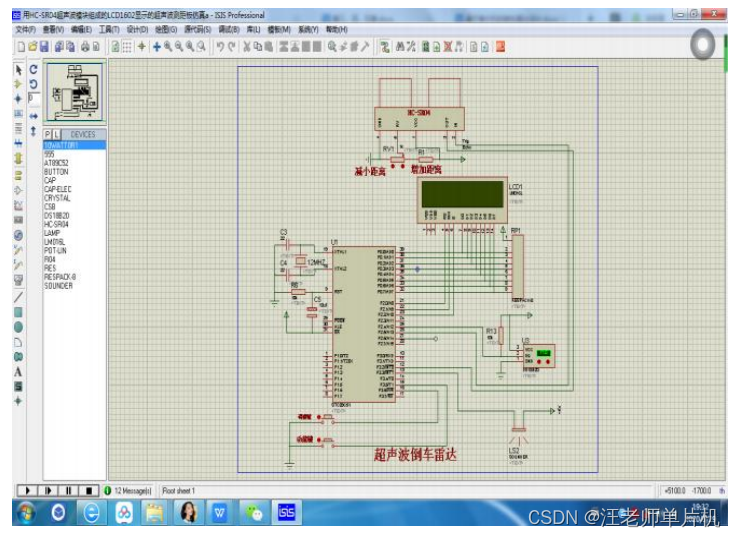
系统整体硬件电路图
如果学弟学妹们在毕设方面有任何问题,随时可以私信我咨询哦,有问必答!学长专注于单片机相关的知识,可以解决单片机设计、嵌入式系统、编程和硬件等方面的难题。
愿毕业生有力,陪迷茫着前行!


















 846
846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









