






自动驾驶多传感器联合标定系列之基于ICP配准算法的激光雷达到激光雷达坐标系的标定工程 , 本商品提供基于ICP匹配算法的lidar2lidar的自动标定工程,通过对三个雷达输出的点云进行地面提取及匹配过程完成三个雷达的外参标定,并完成点云拼接显示。
这个工程带有代码注释,帮助您对标定算法的的理解和学习。
实实在在的工作经验总结
ID:27100700876530640
肥糯糯的老娘
自动驾驶技术的快速发展为我们带来了许多新的挑战和机遇。在自动驾驶系统中,多传感器的联合标定是至关重要的一步,它能够提供准确的传感器数据,并确保各个传感器之间的一致性。本文将介绍基于ICP配准算法的激光雷达到激光雷达坐标系的标定工程,以及它在自动驾驶系统中的应用。
首先,我们需要了解什么是激光雷达的坐标系和标定。激光雷达是一种主要用于感知周围环境的传感器,它通过发射激光束并测量激光束的回波时间和强度来获取环境的三维点云数据。激光雷达坐标系是激光雷达用于表示和处理点云数据的参考坐标系。然而,由于安装误差和机械振动等原因,激光雷达的坐标系可能会与实际坐标系存在偏差,这就需要进行标定以纠正这些误差。
本标定工程提供了基于ICP匹配算法的lidar2lidar的自动标定方法。该方法使用ICP配准算法对三个激光雷达输出的点云进行匹配,并通过地面提取和匹配过程完成三个激光雷达的外参标定。外参标定是确定不同传感器之间相对位置和姿态的过程,它能够使得多个激光雷达的坐标系能够准确对齐。
在进行标定之前,我们需要先进行地面提取。地面提取是将点云数据中的地面点与非地面点进行分离的过程。地面点的提取往往需要考虑地形的变化和噪声的影响,因此我们使用了一种高效的地面提取算法。该算法通过分析点云数据的高度和曲率信息,能够准确地提取出地面点,并将其作为标定的参考。
接下来,我们使用ICP配准算法对提取出的地面点云进行匹配。ICP配准算法是一种常用的点云配准算法,它通过迭代的方式将两个点云进行对齐,使它们的重合度最大化。在本标定工程中,我们使用ICP算法对三个激光雷达输出的地面点云进行匹配,得到它们之间的变换关系。通过这种方式,我们可以获得每个激光雷达的外参信息,从而实现它们之间的准确对齐。
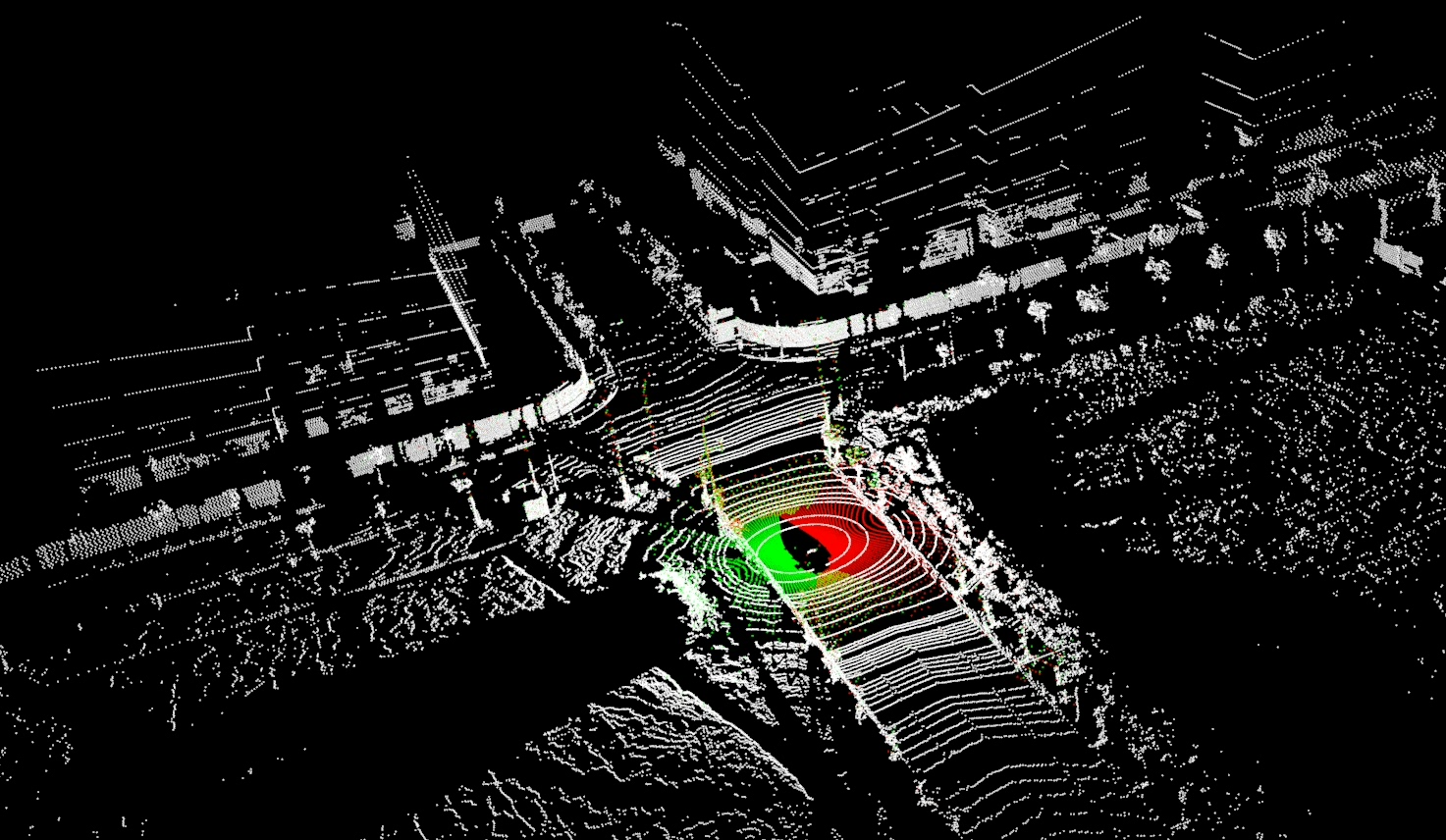
最后,我们将标定结果应用于点云拼接和显示。点云拼接是将多个激光雷达输出的点云数据进行融合的过程,它能够提供更为完整和准确的环境感知信息。在本标定工程中,我们使用标定得到的外参信息对三个激光雷达的点云进行拼接,实现整个环境的三维重构。同时,我们还提供了代码注释,帮助读者理解和学习标定算法的实现细节。
综上所述,本文介绍了一种基于ICP配准算法的激光雷达到激光雷达坐标系的标定工程。这个工程通过地面提取和匹配过程完成了三个激光雷达的外参标定,并实现了点云拼接和显示。这种标定方法在自动驾驶系统中具有重要的应用意义,它能够提供准确的传感器数据,为自动驾驶系统的安全和可靠性提供保障。
本文的编写旨在分享我们的实际工作经验,并提供一个实用的工程实例。通过本文的阅读,读者可以深入了解激光雷达的坐标系和标定方法,并通过代码注释加深对ICP配准算法的理解和学习。我们希望这个工
【相关代码,程序地址】:http://fansik.cn/700876530640.html
















 70
70











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









