






自动驾驶多传感器联合标定系列之激光雷达到相机图像坐标系的标定工程 , 本商品提供两个工程:基于雷达点云的镂空标定板镂空圆圆心的检测工程、基于镂空标定板的激光雷达到相机图像坐标系的标定工程。
其中镂空圆圆心的检测是进行lidar2camera标定的前提。
lidar2camera标定工程中带有多帧数据约束并基于Ceres非线性优化外参标定的结果。
这两个工程带有代码注释,帮助您对标定算法的的理解和学习。
实实在在的工作经验总结
ID:95150700764454040
肥糯糯的老娘
自动驾驶技术的发展带来了许多挑战,其中之一就是多传感器的联合标定。在自动驾驶中,激光雷达和相机是最常用的传感器,它们分别负责感知环境和获取图像信息。为了确保其工作准确性,需要对激光雷达和相机进行标定,以将它们之间的坐标系转换到一致的参考系中。
本文将介绍自动驾驶多传感器联合标定系列之激光雷达到相机图像坐标系的标定工程。其中包括两个工程,分别为基于雷达点云的镂空标定板镂空圆圆心的检测工程和基于镂空标定板的激光雷达到相机图像坐标系的标定工程。
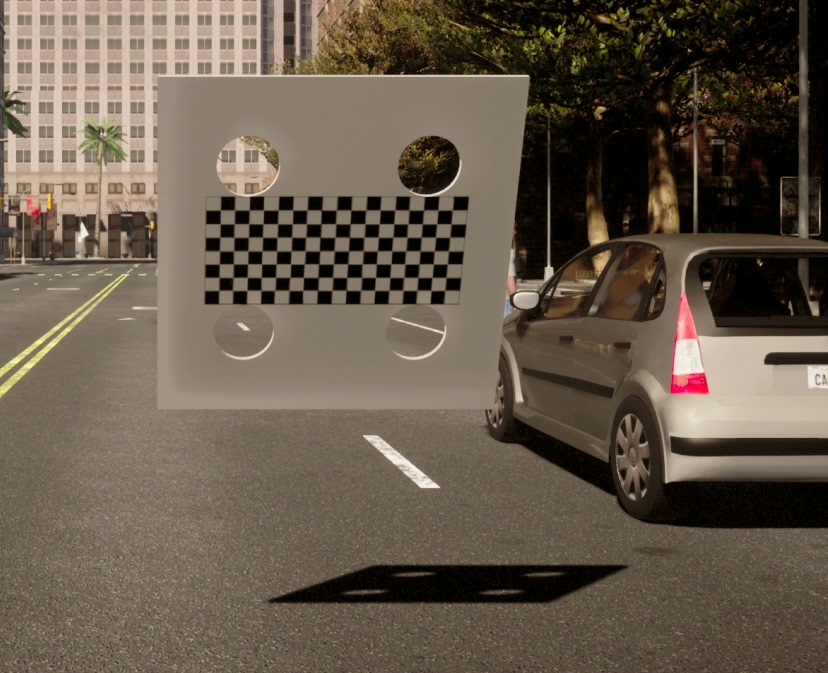
首先,我们需要了解镂空圆圆心的检测是进行lidar2camera标定的前提。激光雷达通过发射激光束并接收反射回来的信号来感知环境,而相机则通过拍摄图像来获取视觉信息。镂空标定板的镂空圆圆心的检测,可以通过激光雷达扫描镂空标定板,并使用算法来识别出镂空圆的圆心位置。这一步骤的重要性在于,它提供了激光雷达和相机之间坐标转换的基础。
接下来,我们将介绍基于镂空标定板的激光雷达到相机图像坐标系的标定工程。在这个工程中,我们使用多帧数据约束,并基于Ceres非线性优化算法进行外参标定。通过利用多帧数据,我们可以获得更准确的标定结果,提高标定的准确性和稳定性。Ceres非线性优化算法可以通过最小化重投影误差来优化外参的估计值,进而得到更精确的标定结果。
在这两个工程中,我们提供了代码注释,这将帮助读者更好地理解和学习标定算法。通过阅读代码注释,读者可以了解每个步骤的具体实现细节,从而更好地掌握标定算法的原理和应用。
最后,我们还将通过实实在在的工作经验总结,分享一些在实际标定过程中遇到的问题和解决方案。自动驾驶技术的实际应用中,标定是一个复杂而关键的环节,需要充分考虑各种因素和挑战,才能确保标定的准确性和稳定性。
总结起来,本文介绍了自动驾驶多传感器联合标定系列之激光雷达到相机图像坐标系的标定工程。通过镂空圆圆心的检测和基于镂空标定板的标定工程,我们可以实现激光雷达到相机图像坐标系的准确标定。同时,我们通过代码注释和实际工作经验总结,向读者提供了学习和应用标定算法的参考。希望本文能对自动驾驶技术的相关研究和实践有所帮助。
【相关代码,程序地址】:http://fansik.cn/700764454040.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









