






干货系列:多激光雷达外参自动标定算法开源
无人驾驶中感知模块负责获取和理解其周围的场景信息,其性能和可靠性是整个无人驾驶系统的关键环节之一,直接影响下游的定位、路线规划和决策等控制链。通过融合多种感知传感器的数据,提高系统在复杂场景下的感知能力是无人驾驶发展的主要方向。然而无论是摄像头、毫米波雷达还是激光雷达,都有自己的坐标系,即传感器产生的数据都是基于自身坐标系的。将各传感器转换到统一坐标系的过程便是传感器的外参标定。
而激光雷达点云数据包含以自身为参考原点的物体3D坐标信息。当多个雷达拼接以获得更大范围3D覆盖时,通过外参将各个激光雷达统一到全局坐标系,便能把各个雷达的点云很好地拼接起来。
附赠自动驾驶最全的学习资料和量产经验以及1000T的资源分享:链接
01 手动外参标定
通过Livox View自带的标定工具可实现多个激光雷达之前的外参标定,关键技巧是要找到一处视野开阔的环境,并且在不同雷达FOV交集处有较规整醒目的建筑或物体 (下文用A表示此物体)。

首先用Livox Viewer采集一帧较长积分时间的A点云数据,然后观察各个激光雷达在其FOV里所形成的A点云,微调Livox Views标定工具里的滚轮控件(调节6个变量[x,y,z,roll,pitch,yaw]),使得各FOV里A点云能完美重叠在一起为佳,此时得到的参数即为所需外参。按此方法标定的精度误差可小于0.1度。
不难看出,此方法依赖于多雷达的共视区域,精度和效率与使用者的熟练度正相关,存在一定的局限性。
02 自动外参标定
在实际使用中,有时不方便找到用于标定的开源环境或参考物体,为此Livox推出了自动标定技术TFAC-Livox算法(Target-Free Automatic Calibration)并在Github上开源。该技术主要依靠几何一致性假设,即多个雷达扫描出来的局部三维模型是一致的,通过对基准雷达(LiDAR0)进行移动建图,然后将其余雷达数据对LiDAR0的重建地图不断进行迭代配准与计算,依靠一致性假设不断减少匹配误差,直到算法收敛并且满足标定矩阵刚性不变特性(六条平行线),最后用一致性算法得出最终标定矩阵(外参)。
Github开源地址: https://github.com/Livox-SDK/Livox_automatic_calibration

红色点云为参照物(激光雷达)建图的结果;绿色点云为目标激光雷达在进行自动校准。
以两个Horizon为例,假设LiDAR0为基准雷达,LiDAR1为待标定雷达。基于数据和轨迹是同步的假设,用LiDAR0进行移动SLAM建图,获得子地图M。而后将LiDAR1的点云基于同步的时间戳与运动轨迹、与粗图估计初值旋转平移变换到对应子地图M附近,通过几何结构一致性约束和近邻匹配算法不断迭代,减少匹配误差,直到算法收敛并满足标定矩阵刚性不变特性(六条平行线),最后用一致性算法计算出最终标定矩阵。

双雷达坐标系以及坐标变换{R,T}
在移动采集数据期间,需保证基准激光雷达扫描的区域(地图M)能被其余激光雷达所探测,尽量选用室内地下车库等特征丰富的环境,采集数据时避免四周有移动物体,运动时尽量缓慢,特别是转弯处,以最小化运动畸变。激光雷达的安装不局限于重叠FOV,可任意安装,只要能保证获取外参初值即可。
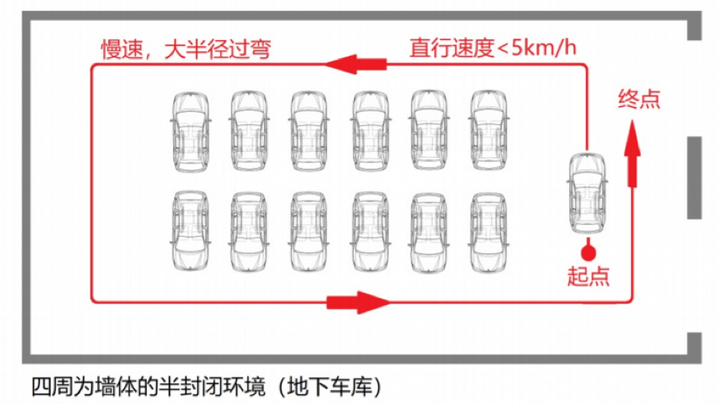
采集环境和路线示意图
03结语
相信通过以上手动/自动的方法,用户可很快完成Livox多激光雷达的标定。Livox亦将陆续开放更多传感器标定的方法,完善整个生态体系,让高性能低成本的Livox激光雷达更好用。

四台浩界和一台泰览15自动标定结果示意图

广告
浩界 Horizon 为 L3/L4 自动驾驶设计的高性能激光雷达
广告
泰览 Tele-15 首款500米量程车载激光雷达
推荐阅读

Livox 联手 AutoX,让你更快坐上无人驾驶出租车

Livox × 高仙商用清洁机器人: 科技改善生活

重磅发布 Livox荣膺2019年领先汽车科技企业50强















 2598
2598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









