







关于四元数转为姿态阵,今天看到一篇文档写的非常清楚明白,特将主要内容摘录下来。
以下为摘录的文档内容:
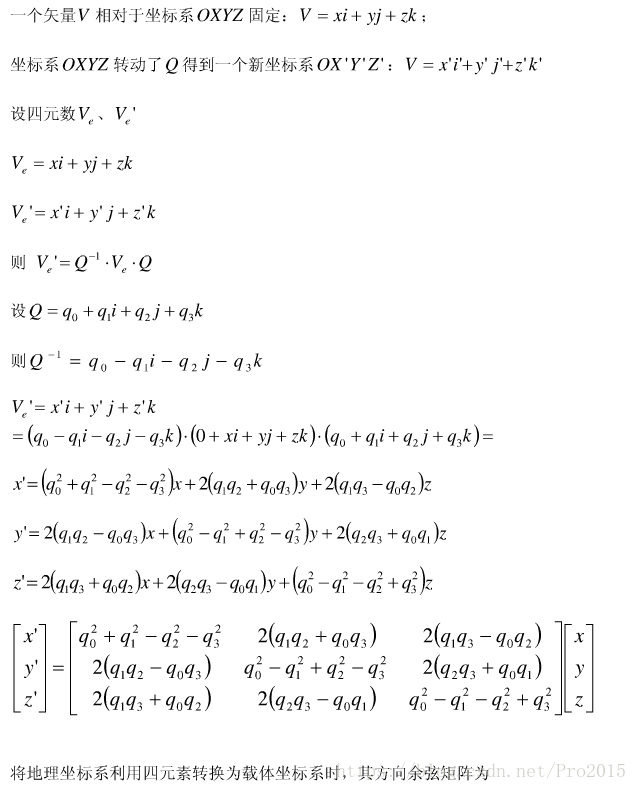
推导过程很机械,也很简单,建议推导一下,这样才会对此有更深刻的印象。
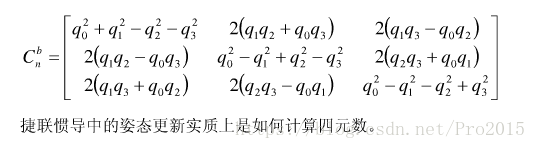
以上表述了从地理坐标系到载体坐标系的过程,惯导中需要将数据从载体坐标系换算到地理坐标系进行解算,此时的姿态矩阵即为上述矩阵的转置,即利用四元数将空间矢量从载体坐标系(b)转换到地理坐标系(n)的姿态矩阵为:
Cnb=⎡⎣⎢⎢q20+q21−q22−q232(q1q2+q0q3)2(q1q3−q0q2)2(q1q2−q0q3)q20−q21+q22−q232(q2q3+q0q1)2(q1q3+q0q2)2(q2q3−q0q1)q20−q21−q22+q23⎤⎦⎥⎥
C
b
n
=
[
q
0
2
+
q
1
2
−
q
2
2
−
q
3
2
2
(
q
1
q
2
−
q
0
q
3
)
2
(
q
1
q
3
+
q
0
q
2
)
2
(
q
1
q
2
+
q
0
q
3
)
q
0
2
−
q
1
2
+
q
2
2
−
q
3
2
2
(
q
2
q
3
−
q
0
q
1
)
2
(
q
1
q
3
−
q
0
q
2
)
2
(
q
2
q
3
+
q
0
q
1
)
q
0
2
−
q
1
2
−
q
2
2
+
q
3
2
]
上述摘录内容虽然易懂,但是表述过于简略,更详细的表述请参考其他文献,例如 003备忘补充之惯性导航基本原理(刘保中)—9.1方向余弦与方向余弦矩阵中的附件第64页(四元数与方向余弦的关系)。
最后附上原文四元数微分方程的推导















 3401
3401











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









