







YOLO11(You Only Look Once)是一个广泛使用的深度学习目标检测算法,能够实现快速而准确的实时目标检测任务。随着无人机(Drone)技术的飞速发展,将YOLOv4与无人机结合,实现基于无人机视角的目标检测,具有非常重要的应用价值。以下是YOLOv4与无人机视角结合在目标检测中的应用介绍。
1. YOLO11目标检测算法概述
YOLO11是YOLO系列中的最新版本,是一种基于卷积神经网络(CNN)的目标检测算法,采用了端到端的训练方式。与传统的目标检测方法不同,YOLOv4通过一次前向传播就能同时输出目标的类别和边界框位置,从而实现高效的目标检测。该算法的关键特点包括:
- 实时性强:YOLO11可以在较低的计算资源下实现高速度的推理,适合应用于实时场景。
- 高准确性:YOLO11通过大量的优化和改进,特别是在数据预处理和模型架构设计上的创新,能够有效提高检测精度。
- 多任务并行处理:YOLO11可以同时检测多个类别的目标,并且能够处理复杂的背景、重叠和遮挡等情况。
YOLOv4的这些特点使得它成为无人机目标检测应用中非常适用的算法。
2. 无人机视角下的目标检测
无人机(Drone)作为一种高空、灵活的移动平台,能够提供独特的视角,并且能够覆盖较大的区域。将YOLOv4应用于无人机视角下的目标检测,可以在多个领域带来革命性的变化。常见的应用场景包括:
- 农业监测:无人机可以用于对农田的实时监控,通过YOLOv4检测作物的生长状况、病虫害以及杂草等问题,从而实现精准农业。
- 灾难救援:在灾后搜索与救援中,YOLOv4可以帮助无人机实时识别灾区中的受灾人员、建筑物、车辆等目标,提供及时的帮助。
- 环境监测:无人机可以用于对森林、河流、海洋等自然环境的监控,YOLOv4可以实时识别非法采伐、垃圾堆放等问题。
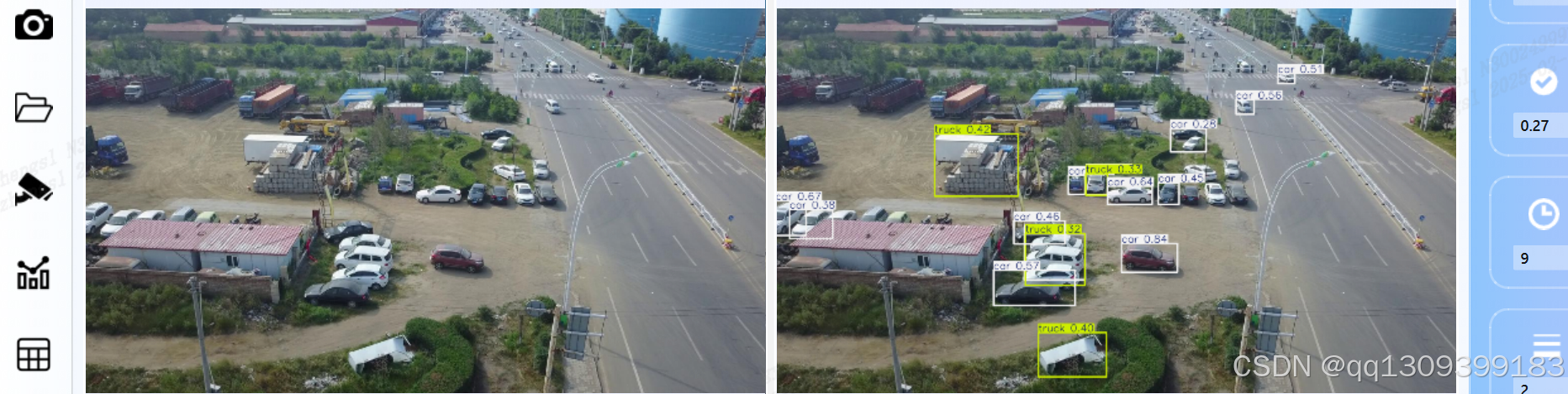
- 交通监控:无人机可以在交通繁忙的道路上方飞行,实时监控交通状况,识别违章停车、交通事故等。
3. YOLO11与无人机结合的挑战
尽管YOLO11具备强大的目标检测能力,将其与无人机结合时,仍然会面临一些技术挑战:
- 飞行环境的复杂性:无人机飞行时,可能遇到复杂的天气、光照变化以及动态障碍物等情况,这些都会影响图像质量,进而影响YOLOv4的检测精度。
- 计算资源的限制:尽管YOLOv4已经优化了计算速度,但无人机的计算能力有限,尤其是在小型无人机上,如何平衡计算性能和实时性仍然是一个难点。
- 图像分辨率问题:无人机的相机分辨率通常较低,而且飞行时的高度会影响拍摄图像的清晰度,这可能导致YOLOv4在处理低分辨率图像时面临识别精度下降的问题。
- 动态场景的挑战:无人机飞行过程中,场景中的物体和背景可能不断变化,如何在动态场景中准确识别目标仍然是一个挑战。
4. YOLO11优化与无人机目标检测的应用
为了克服上述挑战,针对无人机视角下的目标检测,研究者们对YOLO11进行了多个优化:
- 模型轻量化:为了适应无人机计算能力的限制,研究人员对YOLO11进行了模型压缩和轻量化处理,例如通过减少模型参数、使用更高效的卷积层等方式,使得算法能够在较小的计算平台上运行。
- 数据增强:为了提高YOLOv4在复杂环境下的适应性,研究人员采用了大量的数据增强技术,例如图像旋转、裁剪、光照变化模拟等,增强训练数据的多样性,从而提高检测精度。
- 高效的图像预处理:通过高效的图像预处理方法(如图像去噪、锐化等),可以减少复杂环境对目标检测的影响。
- 多尺度检测:无人机图像中的目标大小可能差异较大,YOLOv4采用多尺度检测策略,可以更好地处理不同大小的目标,提高检测准确率。
5. 未来发展趋势
YOLOv4在无人机目标检测中的应用具有巨大的潜力,但仍有许多待解决的问题。未来的发展趋势可能包括:
- 自适应目标检测:未来的算法可能会根据无人机的飞行环境和任务需求,自动调整模型参数,从而提高检测精度和效率。
- 深度融合其他技术:除了YOLOv4,还可以将深度学习与传统的计算机视觉方法、传感器融合等技术结合,进一步提高无人机目标检测的精度和鲁棒性。
- 强化学习与智能飞行:通过将强化学习与目标检测结合,无人机可以通过与环境的交互不断优化飞行路径和检测策略,达到最优的检测效果。
结论
YOLO11作为一种高效、准确的目标检测算法,在无人机视角下的应用前景广阔。通过不断优化算法和结合无人机的特性,未来可以在多个领域实现自动化、高效的目标识别和处理,为农业、灾难救援、环境监测等领域带来创新性的应用,推动无人机智能化的发展。


















 680
680

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









