







本项目聚焦于低光照环境下的图像增强与目标检测技术,通过融合低光照图像增强算法(LIME)和YOLOv8目标检测模型,旨在提升在光线不足条件下的目标识别准确率。该系统能够处理静态图像和动态视频流,通过增强图像质量来确保关键目标(如车辆)的准确检测,这对于自动驾驶等领域具有重要的应用价值。
核心亮点:
-
低光照图像增强:采用自校准照明(SCI)技术,有效提升低光照图像的清晰度和细节。
-
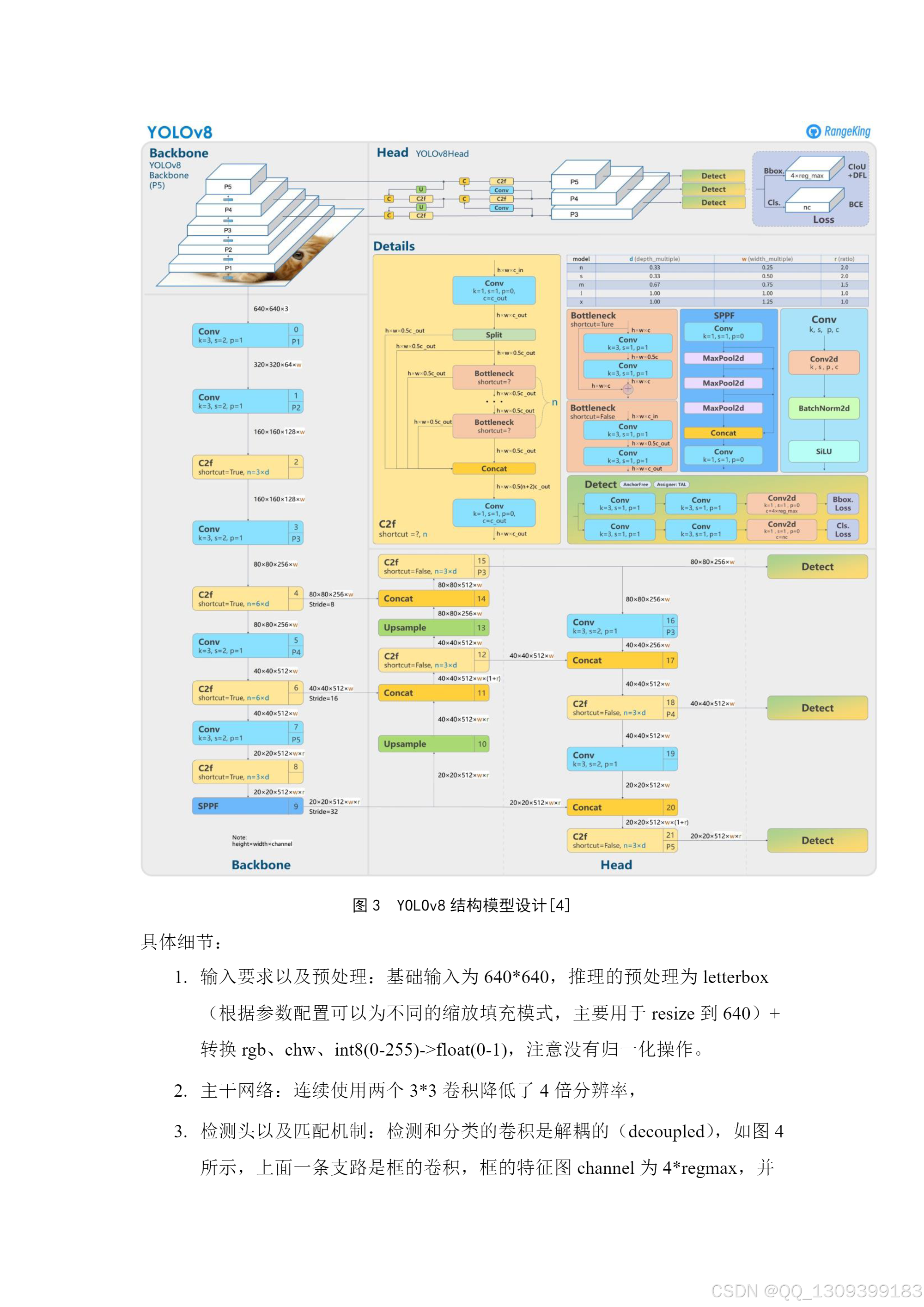
YOLOv8目标检测:在图像增强的基础上,利用YOLOv8模型进行高效的目标检测,确保在低光照环境下的检测准确性。
-
实时检测能力:支持实时视频流处理,能够在动态场景中快速响应并提供增强后的检测结果。
-
多线程加速:通过多线程技术优化处理速度,显著提升系统性能。
- 安装依赖项:
确保硬件支持多线程处理(如多核CPU)以实现最佳性能。pip install -r requirements.txt
使用方法:
- 单张图像处理:
python detect.py --input_image path_to_your_image - 实时视频流检测:
python detect.py --input_stream camera - 批量视频处理:
脚本将自动执行图像增强和目标检测。python detect.py --input_video path_to_video --output_video path_to_output
技术细节:
- 低光照图像增强(LIME):
- 采用SCI框架,通过优化光照分布提升图像质量,从而改善特征提取效果。
- YOLOv8目标检测:
- YOLOv8作为单阶段检测算法,直接在输入图像中预测目标的边界框和类别概率,具有高效性和准确性。
- 性能优化:
- 多线程并行处理显著提升处理速度。
- 图像增强技术进一步提高了检测精度。
效果展示:
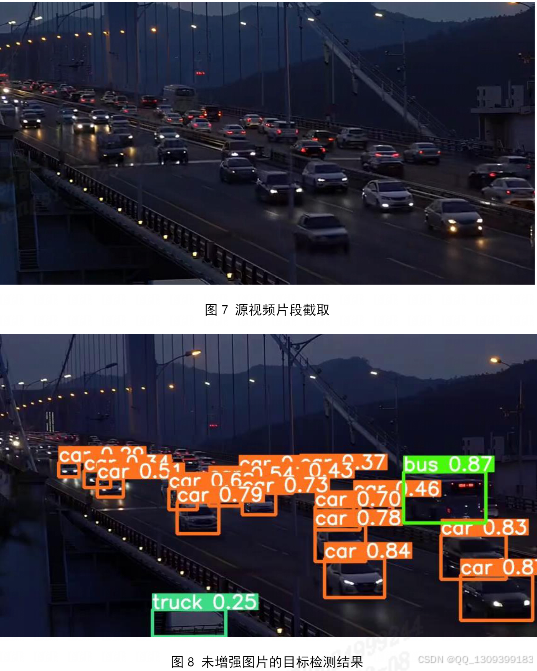
- 图像对比:
- 未增强图像:在低光照条件下,目标检测可能遗漏关键目标。
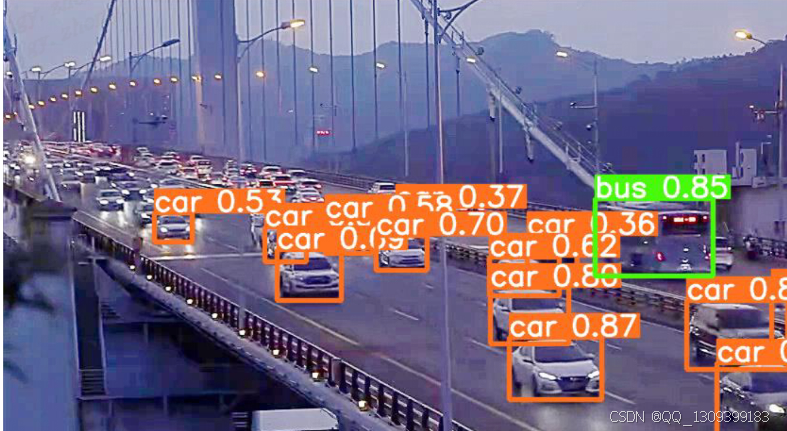
- 增强后图像:图像质量显著提升,目标检测性能得到明显改善。
- 性能数据:
- 单线程处理时间:1475.28秒。
- 四线程处理时间:1369.06秒。
通过本项目,用户能够在低光照环境下实现更高效、更准确的目标检测,为自动驾驶等应用场景提供了强有力的技术支持。


















 1203
1203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









