






规定机器人呈此位置时为关节角零点

机器人的关节坐标系及世界坐标系如下图所示:
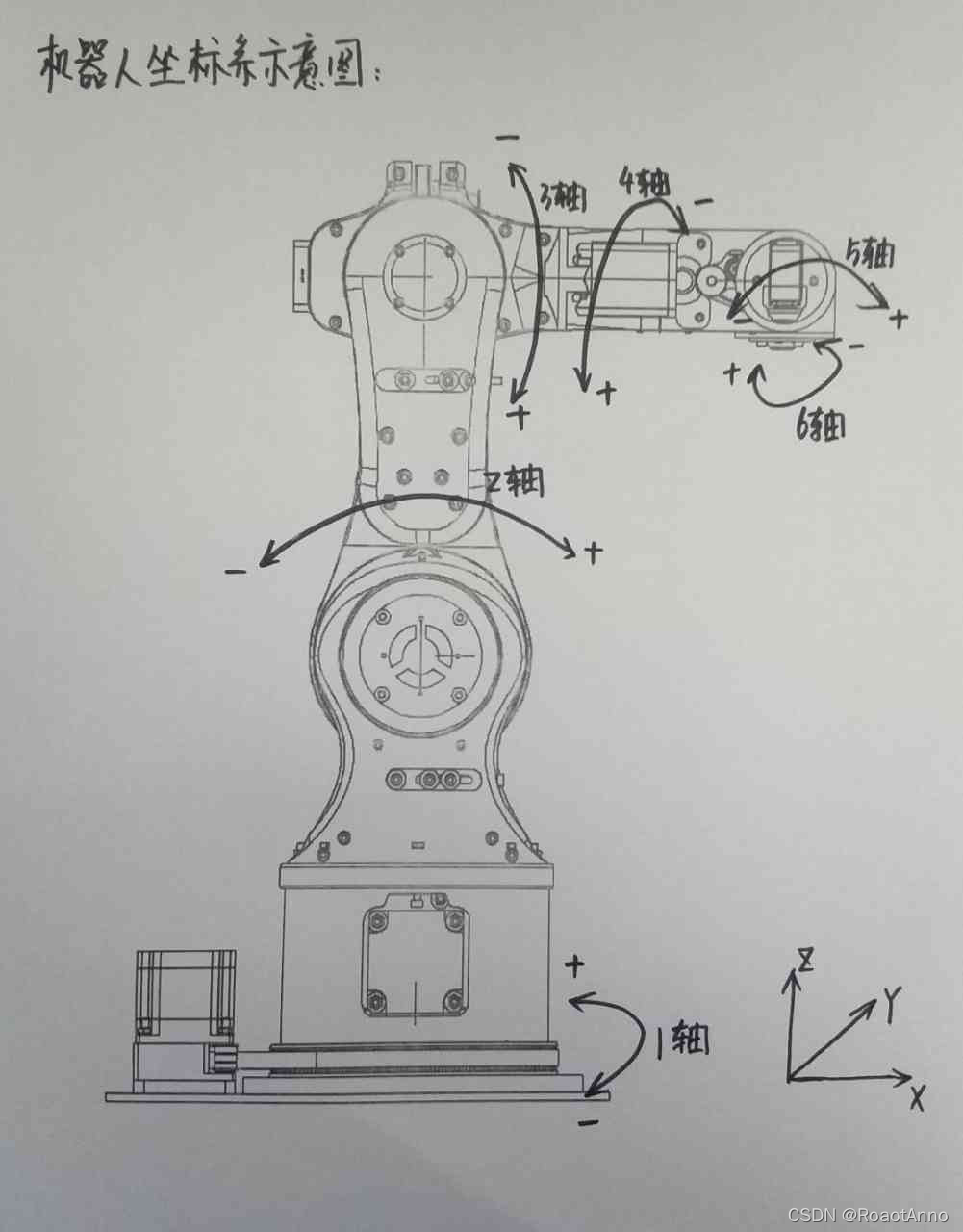
规定机器人底座中心点位坐标零点,机器人正前方为X轴正方向,竖直向上方向为Z轴正方向,Y轴正方向根据右手定则得到。
规定机器人呈此位置时为关节角零点
机器人的关节坐标系及世界坐标系如下图所示:
规定机器人底座中心点位坐标零点,机器人正前方为X轴正方向,竖直向上方向为Z轴正方向,Y轴正方向根据右手定则得到。











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 328
328





