






 该文详细介绍了连杆滑块伸缩模组的工作原理,它通过舵机驱动滑块在光轴上做伸缩运动。模组主要由舵机、滑块、光轴和连杆构成,采用Basra主控板、Bigfish2.1扩展板和7.4V锂电池作为电子硬件。使用Arduino1.8.19环境编程,舵机连接在扩展板的D4端口,通过特定程序实现不同角度的运动控制。所提供的代码示例展示了如何使舵机在90度、50度和130度之间切换,以实现模组的伸缩动作。
该文详细介绍了连杆滑块伸缩模组的工作原理,它通过舵机驱动滑块在光轴上做伸缩运动。模组主要由舵机、滑块、光轴和连杆构成,采用Basra主控板、Bigfish2.1扩展板和7.4V锂电池作为电子硬件。使用Arduino1.8.19环境编程,舵机连接在扩展板的D4端口,通过特定程序实现不同角度的运动控制。所提供的代码示例展示了如何使舵机在90度、50度和130度之间切换,以实现模组的伸缩动作。
1. 运动功能说明
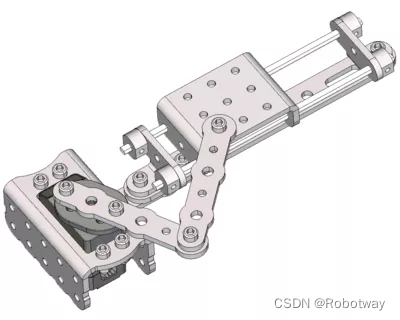
连杆滑块伸缩模组的主要运动方式为舵机带动滑块沿着光轴平行方向做伸缩运动。
2. 结构说明
本模组主要是由舵机、滑块、光轴、连杆等组成。
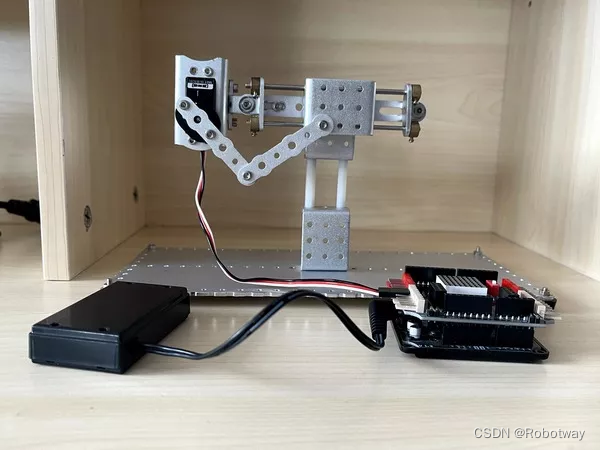
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | |
| 扩展板 | |
| 电池 | 7.4V锂电池 |
电路连接:舵机连接在Bigfish扩展板的D4端口。
4. 运动功能实现
编程环境:Arduino 1.8.19
将参考例程(sketch_apr25a.ino)下载到主控板,实验效果可参考演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-15 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
Servo servo_pin_4;
void setup()
{
servo_pin_4.attach(4);
}
void loop()
{
servo_pin_4.write( 90 );
//delay( 500 );
servo_pin_4.write( 50 );
delay( 500 );
servo_pin_4.write( 90 );
// delay( 500 );
servo_pin_4.write( 130 );
delay( 500 );
}
程序源代码及样机3D文件资料内容详见 连杆滑块伸缩模组-概述

















 3325
3325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









