








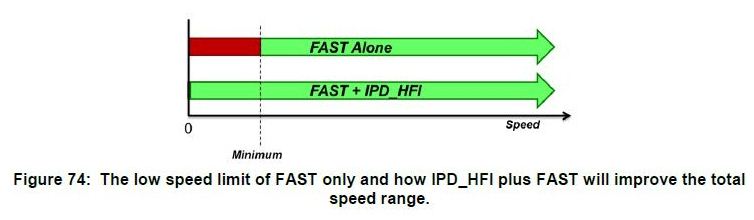
无位置传感器电机控制主要应用于绝大多数时间运行在中、高速的场合,这是因为大多数无位置电机控制技术都需要反电势信号,而反电势信号会有最低频率限制,太低的电机转速会影响到反电势信号的捕获,进而影响转子位置以及转速的估算精度,尽管FAST估算器比一般估算器的最低限制频率都要低,通常低于1Hz,但是它仍然有最低限制频率。

为了能够在零速或者低速连续地估算转子角度,并使得低速和高速能够很好的切换,FAST估算器需要以下两部分来配合使用。
- IPD_HFI:零速和低速时的初始位置检测(Initial Position Detection,IPD)和高频注入。
- AFSEL:IPD_HFI和FAST之间的逻辑切换(Automatic Frequency SELect)。
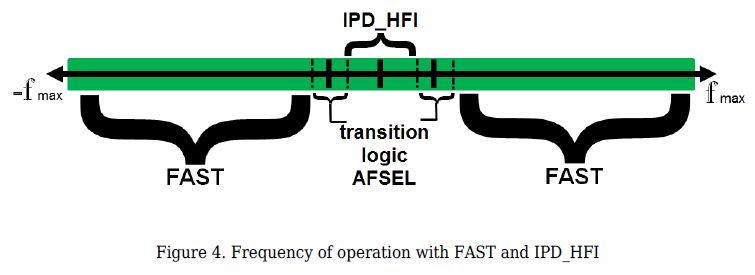
启动阶段的初始位置检测(IPD)和最低限制频率以下的高频注入(HFI)能够扩展FAST适用的转速范围。
参考文献:InstaSPIN Projects and Labs User's Guide,TI文档。















 322
322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









