







6轴并联机器人开发--机械设计
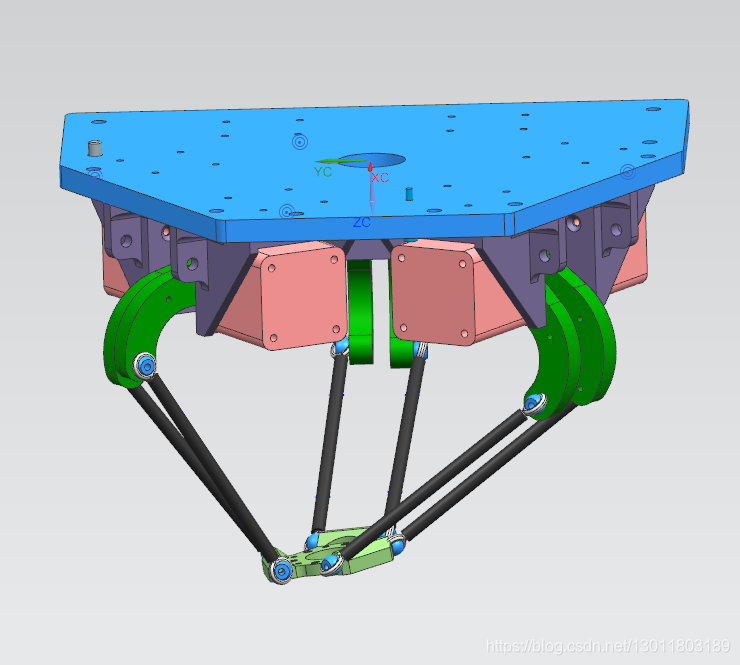
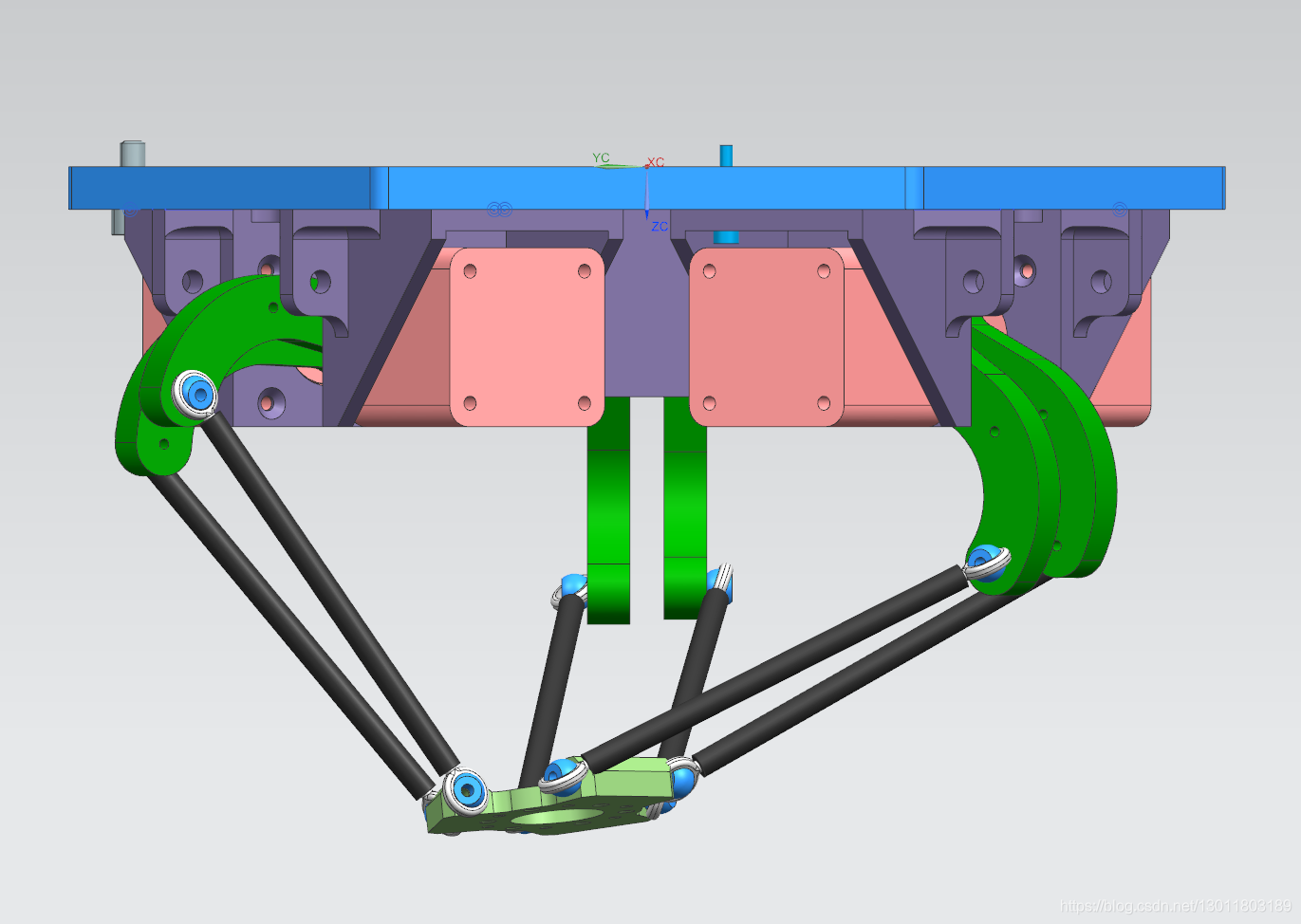
机械设计已经做好了,第一版做为原理验证,计划采用6个42步进电机直驱主动臂,不做减速机构。
顶部的固定平台和主动臂用亚克力。
电机的固定基座是异形件,用3D打印件,还有末端的小运动平台也是。
黑色的从动臂是碳纤维杆。
这样机械部分比较简(省)单(钱),缺点是运动范围非常小(鱼眼轴承偏转角度太小了),不过拿来搞原理验证也够了。
对于三轴并联机器人,由于是3个主动臂驱动6个从动臂,也就是每个主动臂驱动2个从动臂,末端运动平台始终与固定基座平行,全系统是有3个自由度,对应就是XYZ三轴的位置。
本方案有6个电机,所以可以有6度控制,在位姿上表示为XYZ三轴的位置,和XYZ三轴的旋转角度,如图示,底部的工作平台是倾斜和旋转的。这是三轴机构做不到的。
待第一版功能实现以后,第2版将会采用伺服电机+减速机驱动。


















 2379
2379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











