






转动惯量离线辨识算法仿真
1.模型简介
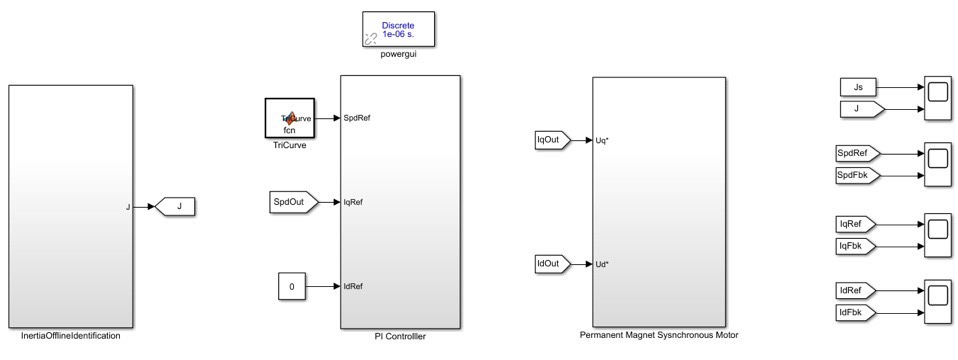
模型为永磁同步电机伺服控制仿真,采用Matlab R2018a/Simulink搭建。
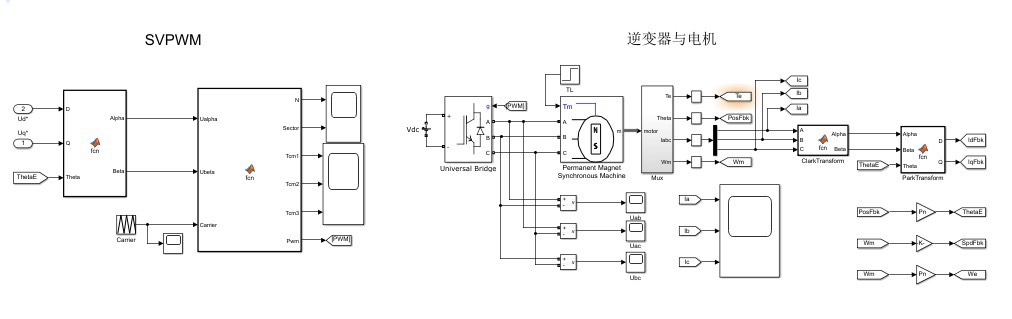
模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、三角波发生器、转动惯量离线辨识、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、三角波发生器、转动惯量离线辨识、模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。
模型均采用离散化仿真,其效果更接近实际数字控制系统。
2.算法简介
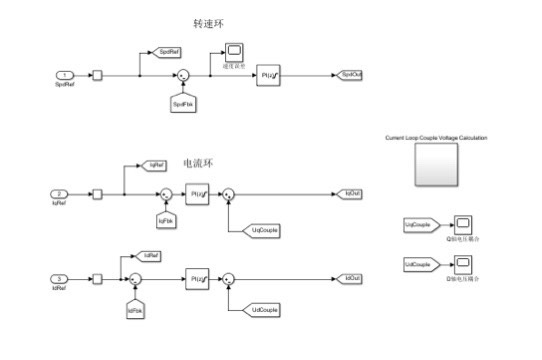
永磁同步电机调速系统由速度环、电流环双环结构构成,其中,电流环采用PI控制,并具有电流环解耦功能;转速环采用抗积分饱和PI控制。
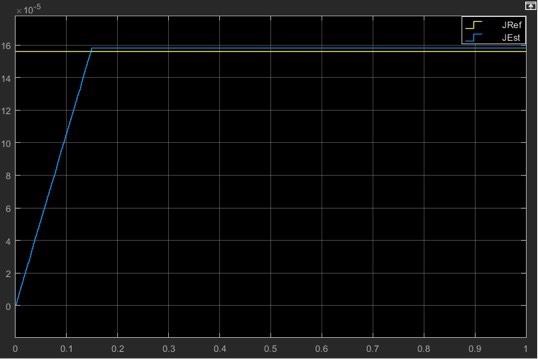
转动惯量离线辨识采用加减速方法,其算法简单适用于实际应用,辨识精度较高。
转速给定为正负对称的三角波,仿真时可修改不同的转动惯量值进行辨识,且不需要调整PI参数。
3.仿真效果如下,提供。
ID:14135693465778693
怎落笔都不对


转动惯量离线辨识算法仿真
1.模型简介
永磁同步电机伺服控制是一种常见的控制方式,本文所介绍的模型采用Matlab R2018a Simulink进行搭建。模型内包含了DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、三角波发生器、转动惯量离线辨识、速度环、电流环等模块。
其中,SVPWM、Clark、Park、Ipark、三角波发生器、转动惯量离线辨识这些模块都是采用Matlab Function编写,其与C语言编程类似,更容易进行实物移植。为了更接近实际数字控制系统的效果,本模型使用离散化仿真方法。
2.算法简介
永磁同步电机调速系统主要由速度环和电流环构成,其中电流环采用了PI控制器,并具备电流环解耦功能;速度环则采用了抗积分饱和PI控制。
转动惯量离线辨识算法采用了简单的加减速方法,适用于实际应用,并且具备较高的辨识精度。仿真时,我们可以调整不同的转动惯量值进行辨识,而无需调整PI控制器参数。
为了验证算法的仿真效果,我们提供如下示例:
- 示例一:转动惯量值为0.01 kgm^2,速度环和电流环的参数为:比例增益Kp=1,积分增益Ki=0.1。
- 示例二:转动惯量值为0.02 kgm^2,速度环和电流环的参数为:比例增益Kp=1,积分增益Ki=0.1。
3.仿真效果展示
为了直观地展示仿真效果,我们提供了以下图表:
图表1:转动惯量离线辨识示例一仿真结果(转动惯量值为0.01 kgm^2)
(插入图表1)
图表2:转动惯量离线辨识示例二仿真结果(转动惯量值为0.02 kgm^2)
(插入图表2)
通过以上示例,我们可以看到仿真结果与设定的转动惯量值较为接近,验证了转动惯量离线辨识算法的有效性。
总结:
本文介绍了永磁同步电机伺服控制中的转动惯量离线辨识算法,该算法通过加减速方法实现对转动惯量的辨识,具备较高的辨识精度和简单的实现方式。仿真结果验证了算法的可靠性和有效性。希望本文能对相关领域的研究人员和工程师提供一定的参考和帮助。
以上相关代码,程序地址:http://wekup.cn/693465778693.html















 4045
4045











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









