







前言
当我们使用FOC控制电机时,需要获得转子位置和角速度信息,一般我们会利用添加硬件(传感器)的方式去获取电机的转子角度和速度信息(有感控制),但在没有传感器或者一些项目不方便添加硬件的时候,就需要我们利用可直接测量的信息(如三相电流等),去估算当前的转子角度和电机速度,SMO滑模观测器就是用于是根据系统的外部变量(输入变量和输出变量)的实测值得出状态变量估计值的一类动态系统,通过测量实际系统的输入输出,可以得到给定系统内部状态的估计值。利用滑膜观测器我们就可以在没有传感器的情况下估算出电机的转子位置和电机速度信息。
一、滑膜观测器的原理
我们先来看一下两项静止坐标系(alpha-bate)下的电压方程

其中

我们的目的,是从已知信息估算出转子位置信息,根据上式我们可以看到反电动势E就包含着转子位置信息θ,因此我们只要估算反电动势E,就可以得到θ。
根据表贴式电机Ld=Lq=L,将上式简化并写为电流方程可得:
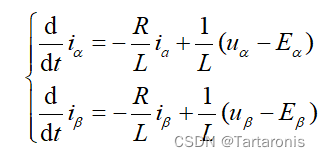
滑膜观测
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 540
540











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









