






二自由度机械臂滑模控制 自适应分数阶滑模控制器 二自由度机械臂(FOSMC) (文献复现)
ID:9297692670144561
爱小马的海盐大傻
二自由度机械臂滑模控制是当前机器人控制领域的研究热点之一。在工业自动化、物流处理等领域,机械臂的应用越来越广泛,因此提高机械臂控制精度和稳定性成为了研究的关键问题。
滑模控制是一种基于非线性动态系统的控制方法,通过引入滑模面来实现系统状态的快速抑制和跟踪。在二自由度机械臂控制中,滑模控制可以有效地解决系统非线性、不确定性等问题,提高系统的鲁棒性和控制性能。
自适应控制是一种根据系统动态响应进行参数调整的控制方法,能够适应系统的变化和不确定性。在滑模控制中,自适应方法的引入可以进一步提高系统的控制性能,提高系统的适应能力和鲁棒性。
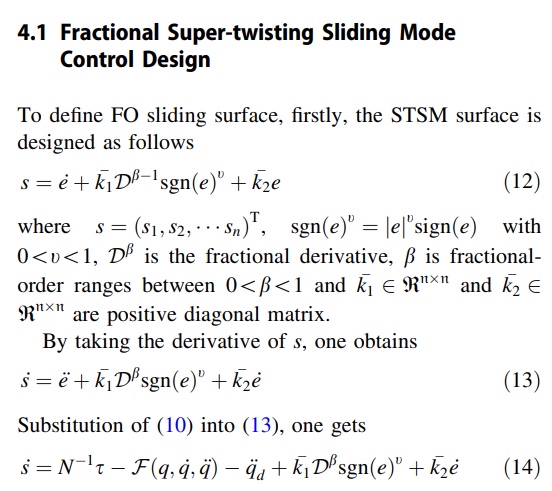
分数阶控制是一种对传统整数阶控制进行扩展的控制方法,能够更好地描述复杂系统的动态行为。在二自由度机械臂控制中,引入分数阶滑模控制器可以更准确地描述系统的动态特性,提高系统的控制精度和稳定性。
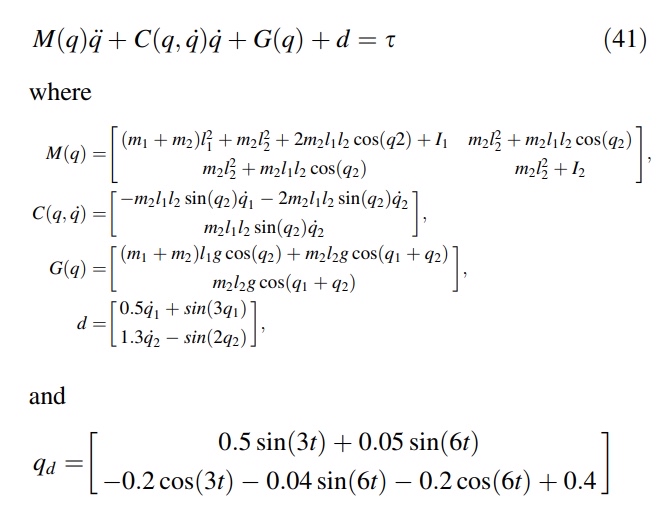
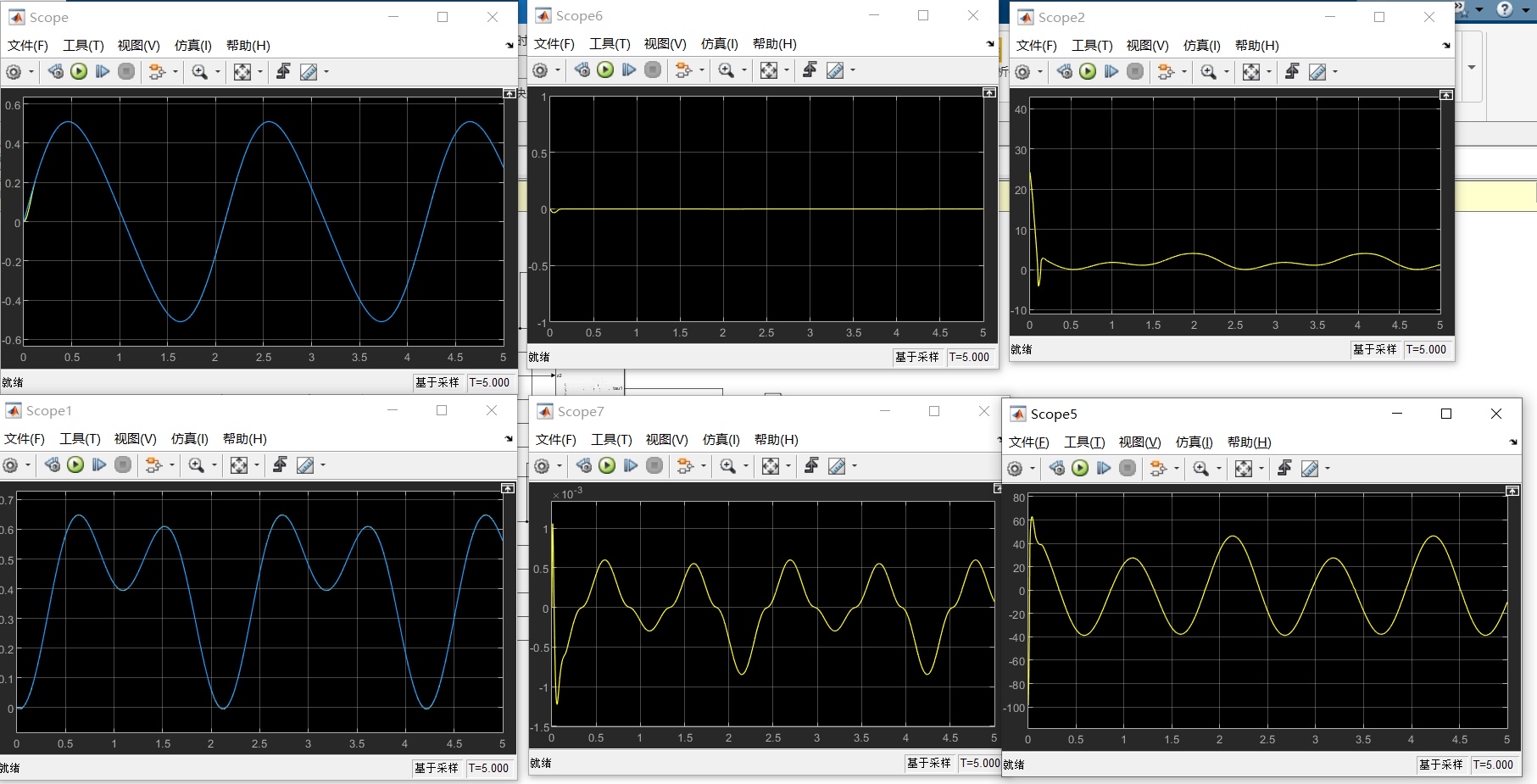
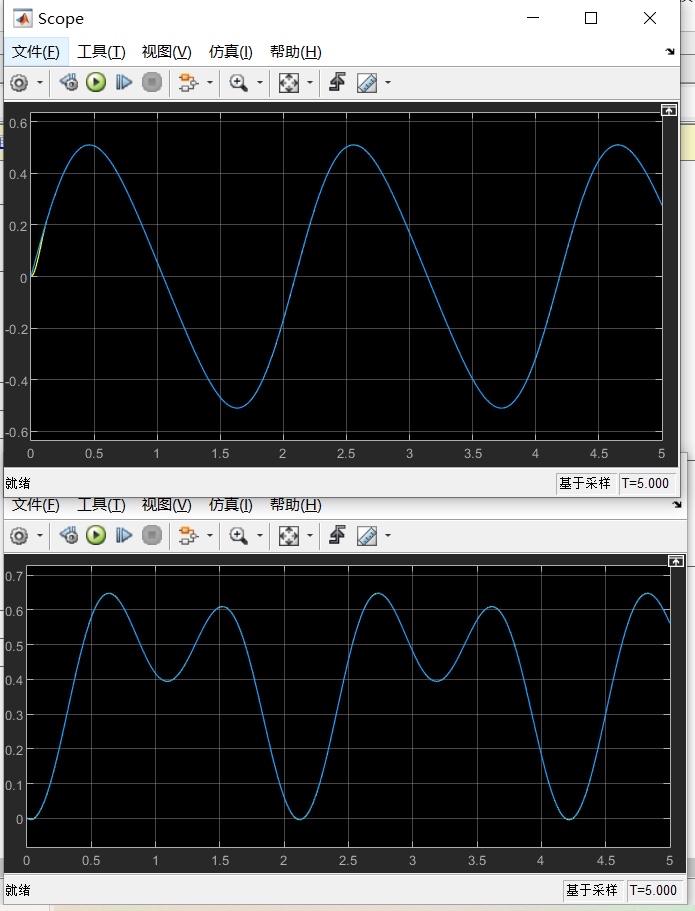
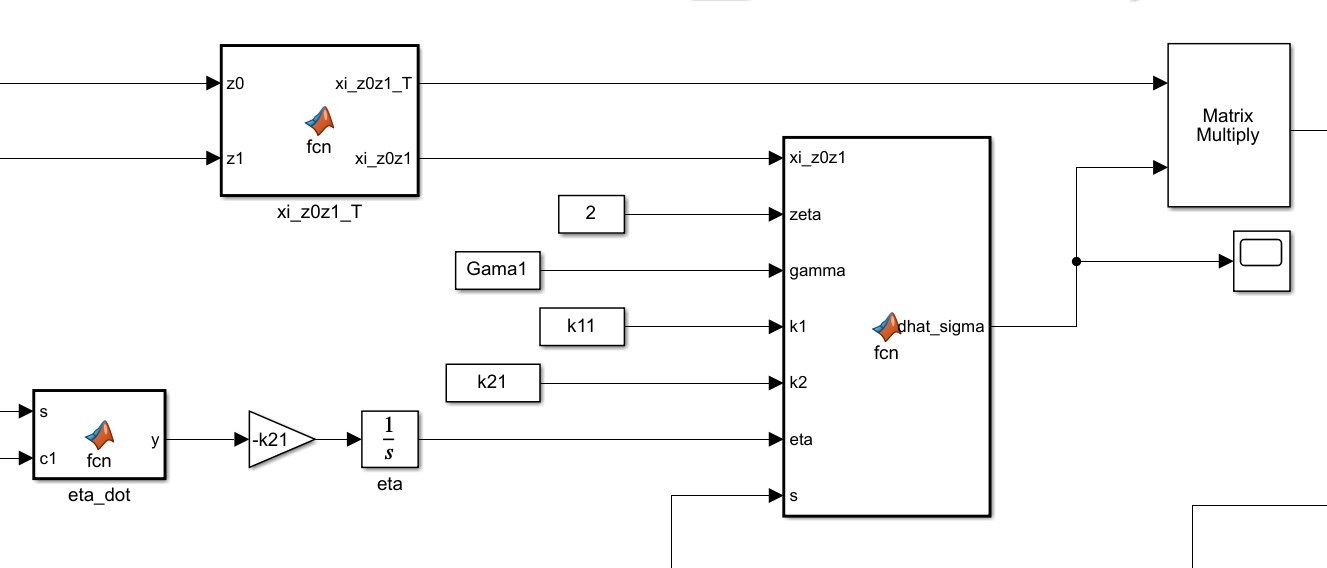
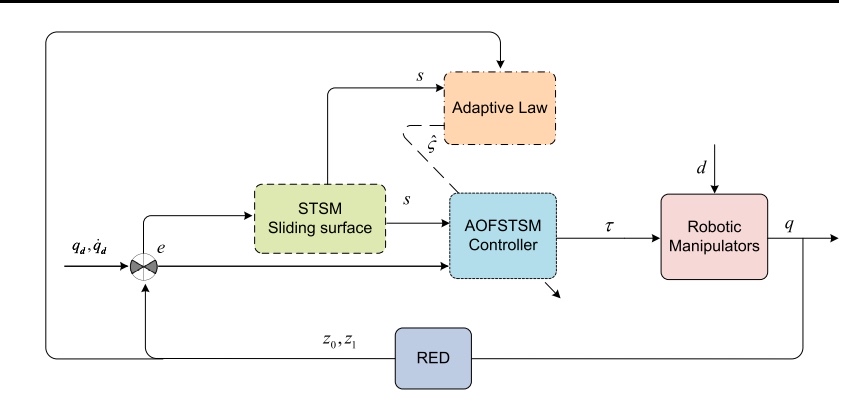
本文旨在复现相关文献中的二自由度机械臂滑模控制自适应分数阶滑模控制器(FOSMC)方法,并对其进行分析和讨论。首先,介绍了二自由度机械臂的基本结构和动力学模型,分析了系统的非线性、不确定性和时滞等问题。然后,详细介绍了滑模控制和自适应控制的基本原理,以及分数阶滑模控制器的设计方法和参数调整策略。接着,通过数值仿真和实验验证,对比分析了传统整数阶滑模控制和自适应分数阶滑模控制的控制性能和鲁棒性。最后,总结了本文的研究内容和结论,并对未来的研究方向进行了展望。
通过本文的研究,我们可以得出结论:二自由度机械臂滑模控制自适应分数阶滑模控制器能够有效地改善系统的控制性能和稳定性,提高系统的适应能力和鲁棒性。该方法在工业自动化、物流处理等领域具有广泛的应用前景,对于推动机械臂控制技术的发展具有重要意义。
本文的研究还存在一些不足之处,如对于系统的非线性和不确定性的建模不够精确,FOSMC参数的确定方法有待进一步优化等。未来的研究可以深入探索多自由度机械臂滑模控制和分数阶控制的组合应用,进一步提高系统的控制精度和鲁棒性。此外,还可以结合深度学习等新兴技术,进一步提高机械臂控制的智能化水平。
总之,二自由度机械臂滑模控制自适应分数阶滑模控制器是一种有效的机械臂控制方法,能够提高系统的控制性能和稳定性。本文的研究为机器人控制领域的进一步发展提供了重要参考和借鉴,为实现智能化机械臂控制和应用打下了基础。
【相关代码 程序地址】: http://nodep.cn/692670144561.html















 181
181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









