







 本文提供了一个理论框架,分析了多智能体网络系统的共识算法,探讨了有向信息流、鲁棒性、时延和性能保证。内容涵盖了网络动态系统的共识问题,包括耦合振荡器同步、编队控制、传感器融合等多个应用领域,强调了图拉普拉斯算子在算法中的关键作用,并介绍了分布式计算的历史和应用。
本文提供了一个理论框架,分析了多智能体网络系统的共识算法,探讨了有向信息流、鲁棒性、时延和性能保证。内容涵盖了网络动态系统的共识问题,包括耦合振荡器同步、编队控制、传感器融合等多个应用领域,强调了图拉普拉斯算子在算法中的关键作用,并介绍了分布式计算的历史和应用。
在所有参与者之间提供快速协议和团队合作的算法通过自组织网络系统实现有效的任务执行。
By Reza Olfati-Saber, Member IEEE, J. Alex Fax, and Richard M. Murray, Fellow IEEE
小于 翻译
摘要:本文提供了一个理论框架,用于分析多智能体网络系统的共识算法,重点是有向信息流的作用,由于链路/节点故障导致的网络拓扑变化的鲁棒性,时延和性能保证。概述了网络中信息共识的基本概念、算法的收敛方法和性能分析。我们的分析框架是基于矩阵理论、代数图理论和控制理论的工具。我们讨论了网络动态系统中的共识问题与各种应用之间的联系,包括耦合振荡器的同步、群集、编队控制、小世界网络中的快速共识、马尔可夫过程和基于八卦的算法、网络中的负载平衡、空间中的会合、传感器网络中的分布式传感器融合和信念传播。我们建立了复杂网络的频谱和结构特性与共识算法的信息扩散速度之间的直接联系。简要介绍了具有非局部信息流的网络系统,它比具有格子型最近邻交互的分布式系统快得多。仿真结果表明,在多车编队的协同控制中,采用小波约束约束对编队协同控制的作用。
关键字:共识算法;合作控制;植绒;图拉普拉斯算子;信息融合;多代理系统;网络控制系统;耦合振荡器的同步
1引言
共识问题在计算机科学中有着悠久的历史,并构成了分布式计算领域的基础 [1]。专家组共识问题的正式研究起源于 1960 年代的管理科学和统计学(参见 DeGroot [2] 和其中的参考文献)。二十年后,DeGroot 的统计共识理论思想再次出现在从多个传感器[3]和医学专家 [4]获得的具有不确定性的信息聚合中。
网络上的分布式计算在系统和控制理论方面具有传统,从 Borkar 和 Varaiya [5] 和 Tsitsiklis [6] 以及 Tsitsiklis、Bertsekas 和 Athans [7] 关于分布式决策系统和并行的异步渐近协议问题的开创性工作开始计算[8]。在代理网络(或动态系统)中,Bconsensus[ 意味着就一定数量的兴趣达成协议,这取决于所有代理的状态。共识算法 [(或协议)是一种交互规则,它指定代理与其网络上所有邻居之间的信息交换。
Olfati-Saber 和 Murray 介绍了提出和解决网络动态系统共识问题的理论框架在 [9] 和 [10] 中,建立在Fax 和 Murray [11]、[12] 早期工作的基础上。在不计算任何目标函数的情况下达成一致的对齐问题的研究出现在 Jadbabaie 等人的工作中 [13]。 [14] 和 [15] 中介绍了这项工作的进一步理论扩展,着眼于处理网络中的定向信息流,如图 1(a) 所示。
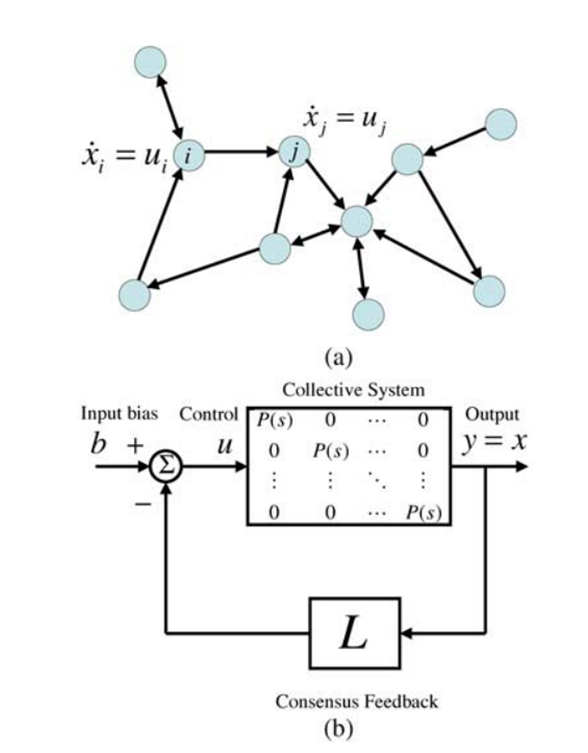
图 1. 两种等效形式的共识算法:(a) 一个集成代理网络,其中代理 i 接收其邻居代理 j 的状态 xj,如果存在链接连接两个节点; (b) 具有相同传递函数 </
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1120
1120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









