







目录
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
概述
在现实的工业机器人应用中,冲压机、输送带、龙门架、数控机床等这些常用的外部设备都有独立的控制系统,它们通过与机器人的I/O信号通信实现信息交互。
在对安川机器人进行虚拟仿真时,MotoSimEG-VRC软件也同样能够实现外部设备模型的创建,并且创建的外部设备模型也具有独立的控制系统,在仿真环境中也能够与机器人进行I/O信号交互。
MotoSimEG-VRC软件支持创建冲压机、输送带、龙门架三种类型的外部设备,每一种设备的控制器都可视为独立的RCS控制器,具备RCS控制的核心功能。本期,先来介绍冲压机外部设备的添加与虚拟仿真操作方法。
冲压机添加与属性配置
MotoSimEG-VRC软件能够自动创建冲压机模型,只不过创建出的模型较为简易,只有冲压机的两个核心部件,即上模与下模。上下模之间做相对的直线运动,就能够仿真出冲压机的冲压动作效果。
软件“Controller”菜单栏下的“External Device”命令组中,点击“New”![]() 命令按钮,在其下拉菜单中点击“Press”
命令按钮,在其下拉菜单中点击“Press”![]() ,弹出Press对话框。
,弹出Press对话框。
对话框中的“Make Model”选项用于选择是否使用默认冲压机模型,默认情况下复选框已勾选,点击“OK”按钮。

弹出“Add Robot”对话框,在对话框中可以自定义冲压机模型名称(Name),这里保持默认名称,点击“OK”按钮。

稍等片刻后,软件视图区域生成冲压机模型的核心部件,包括上模模型和下模模型。同时,左侧的Cad Tree中也出现冲压机模型文件(PRESS)。

作为外部设备的冲压机模型,其运动机构已经制作完成,在位置面板(Position Panel)中,通过对“Z”关节的操作可以手动运行冲压机。

冲压机示教编程与仿真运行
利用这种方式创建的冲压机是与机器人平级的一种外部设备,它有自己独立的控制系统(RCS),能够像机器人一样通过示教编程来控制其运动。
在“Controller”菜单栏下的“External Device”命令组中,点击“Job Panel”![]() 命令按钮,打开冲压机作业编辑器面板。
命令按钮,打开冲压机作业编辑器面板。

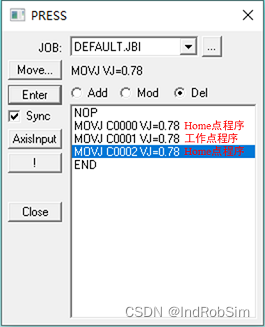
首先在Position Panel中手动运行冲压机到示教点位处,如Home点位置处。然后点击对话框中的“Move…”按钮,弹出Interpolation对话框,在对话框中可以选择冲压机的运动类型、运动速度、定位等级等指令参数,要在修改示教点位数据时启用运动类型和速度的修改,可以勾选“Allow Modif.”复选框。

这里冲压机Home点的运动指令保持默认,点击“OK”按钮。返回冲压机作业编辑器面板,先点选“Add”单选按钮,再点击“Enter”按钮,此时在作业编辑器面板的程序显示框内出现冲压机当前点位的运动程序。

参考上述Home点运动程序的编写步骤,为冲压机再示教工作点位运动程序,以及最后返回到Home点位的运动程序。
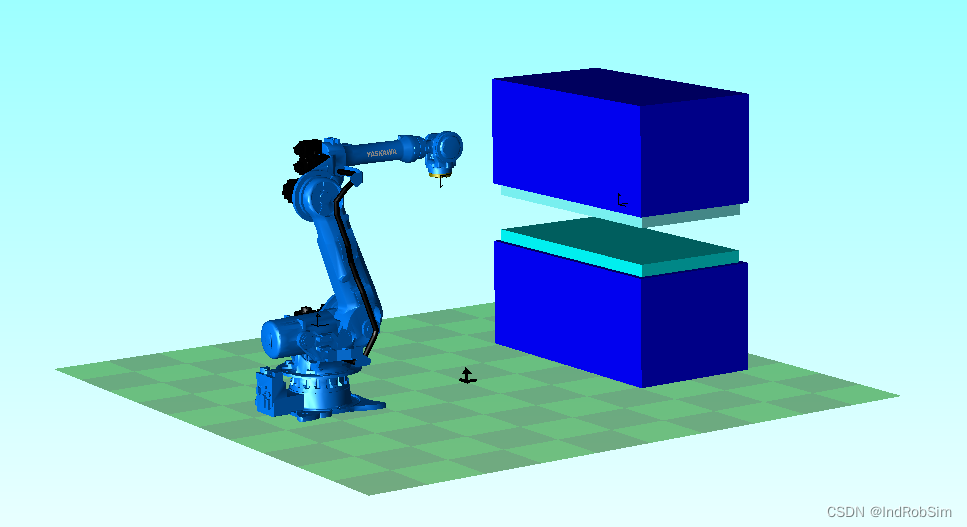
程序编写完成后,在“Simulation”菜单栏下点击“Start”按钮,可以看到冲压机模型按照编写的程序执行了冲压动作,仿真运行效果如下方动态图所示。

机器人控制冲压机启停方法
冲压机的控制器除了能够控制上下模实现独立运行外,还能够与工作站中其他设备的控制器进行I/O信号交互,其信号交互方式与机器VRC控制器类似。
以实现机器人与冲压机的I/O信号交互为例,在虚拟仿真环境中添加一台机器人,机器人的系统参数任意选择即可。
打开冲压机作业编辑器面板,在程序显示框内双击要添加I/O信号指令程序的上一条程序,弹出Line Edit对话框。在对话框中,按照机器人外部I/O信号控制指令的编程格式,输入I/O信号控制与检测代码,点击“Add Line”按钮。

这样,就在双击的指令程序后添加了一条I/O信号控制指令,如下图所示。
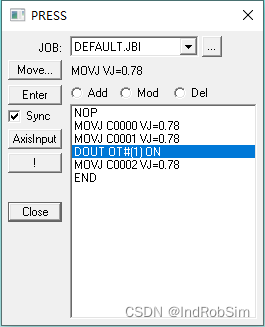
重复上述步骤,在合适的位置处添加I/O信号交互程序语句。一般情况下,信号输出使用DOUT指令,检测输入信号使用WAIT指令。

冲压机I/O信号交互程序编写完成后,再来编写机器人程序。在打开机器人虚拟示教器之前,先要在软件菜单栏最右侧的“控制器切换”下拉列表中选择机器人控制器。当然,要再次编写冲压机程序时,也要先在控制器切换下拉列表中选择冲压机器人控制器。

在机器人虚拟示教器中示教机器人运动程序,并添加与冲压机I/O信号交互的指令程序,全部编写完成后的机器人程序如下图所示。

要想实现虚拟控制器之间的I/O信号交互,还要建立冲压机与机器人之间的I/O信号映射关系。
切换到机器人控制,然后利用“Connection Manager”命令建立机器人外部输入信号#20030(IN#0001)与冲压机输出信号#10010(OUT#0001)之间的连接,以及冲压机输入信号#00010(IN#0001)与机器人外部输出信号#30030(OUT#0001)之间的连接,并将其全部激活,如下图所示。
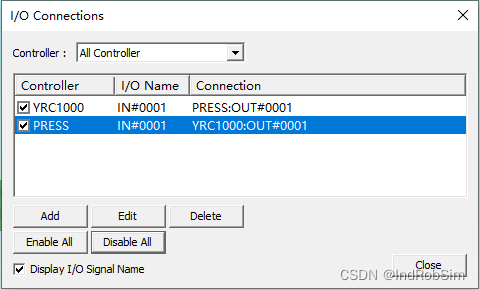
这样,冲压机与机器人之间就实现了I/O信号交互,并能够进行交互控制。再次仿真运行,可以看到冲压机、机器人按照编写的程序执行了指定的运动,仿真运行效果如下方动态图所示。

The End
















 886
886











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











