






一、ROS接入imu
参考链接 HandsFree ROS IMU_飞同学的博客-CSDN博客
运行命令
# imu_type根据自己的imu型号填写,可选项:a9,b9,b6
roslaunch handsfree_ros_imu rviz_and_imu.launch imu_type:=a9二、ROS接入3D激光雷达velodyne vlp-16
参考链接 Ubuntu18.04 + ROS Melodic 配置Velodyne VLP16激光雷达 - 墨天轮
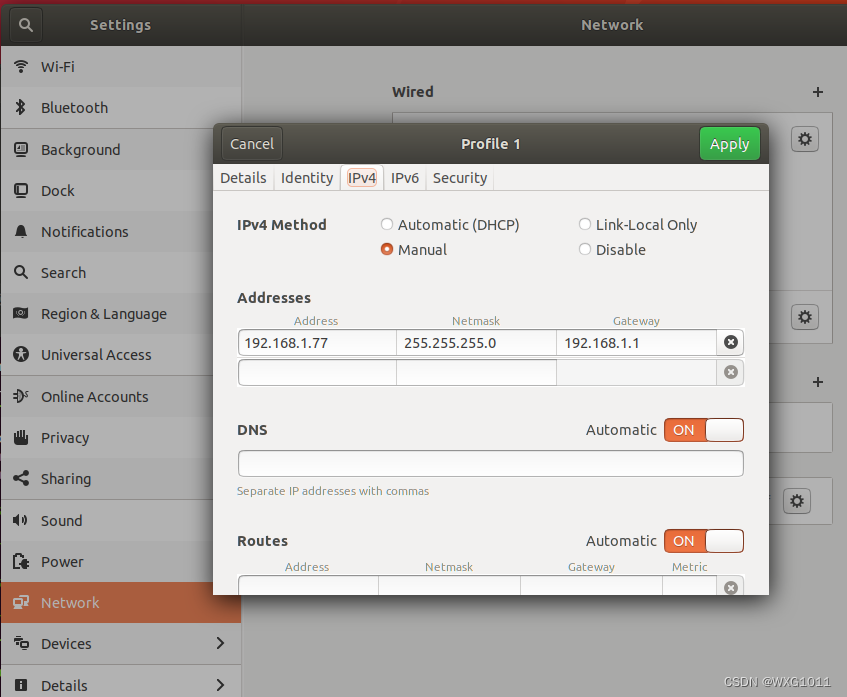
1、配置Velodyne16与电脑在同一网段
Velodyne16默认IP : 192.168.1.201
将电脑配置与velodyne为同一网段192.168.1.xxx,如下图
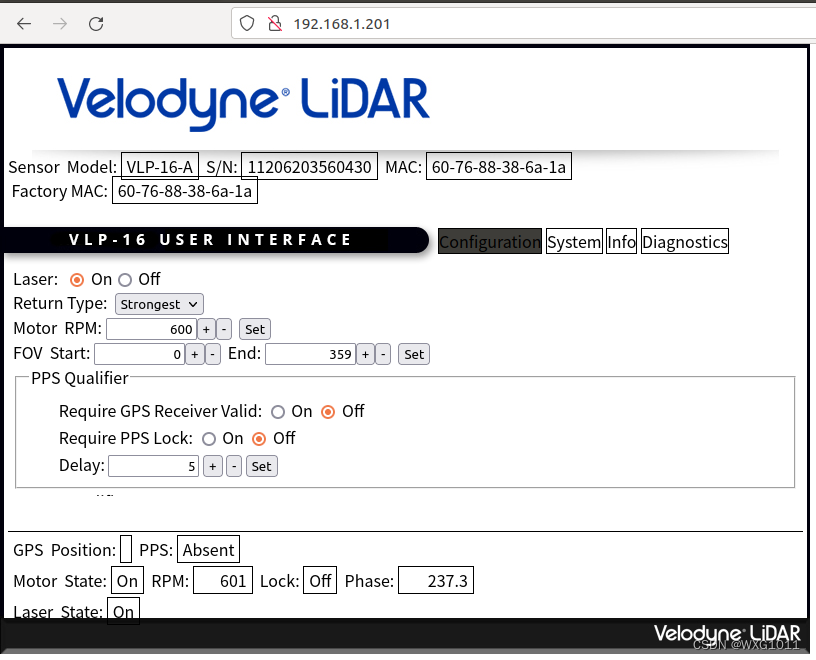
打开浏览器输入192.168.1.201,出现如下界面,即为配置成功。
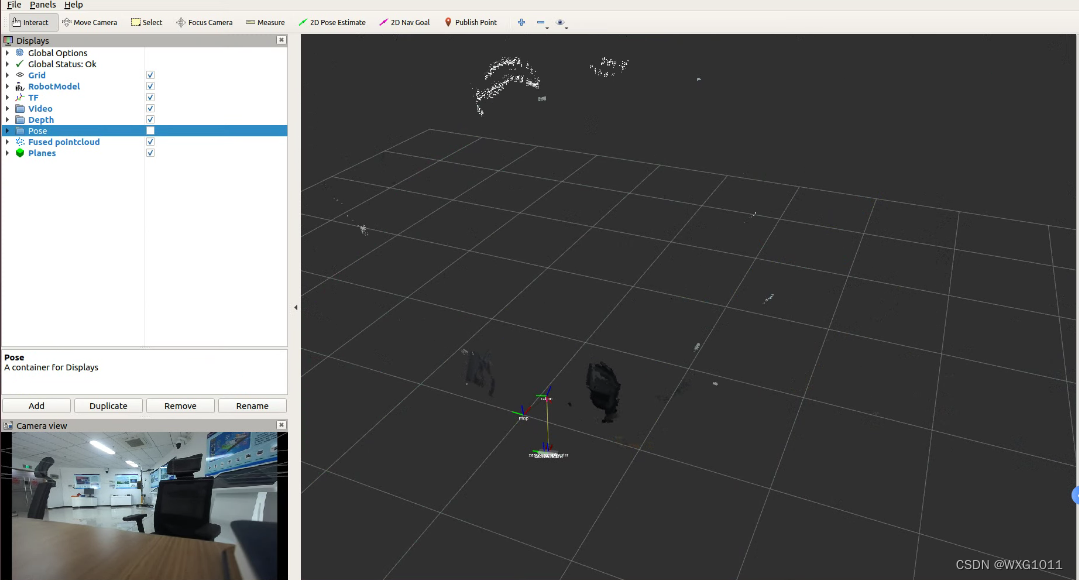
2、运行并通过Rviz查看点云
roslaunch velodyne_pointcloud VLP16_points.launch
rosrun rviz rviz -f velodyne进入Rviz后,点击左下角Add添加By topic -> velodyne_points -> PointCloud2
修改左边目录中的Global Options -> Fixed Frame为:velodyne
以及PointCloud2 -> Topic为:/velodyne_points
三、ROS接入ZED2
1、基础环境
Ubuntu 18.04
ZED SDK ≥ 3.7 and its dependency CUDA
注:ZED SDK版本要高于3.7(包括3.7)
2、安装zed-ros-wrapper
cd ~/catkin_ws/src
git clone --recursive https://github.com/stereolabs/zed-ros-wrapper.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
source ./devel/setup.bash3、启动ZED节点
roslaunch zed_wrapper zed2.launch4、启动rviz,添加话题,即可展示
rviz
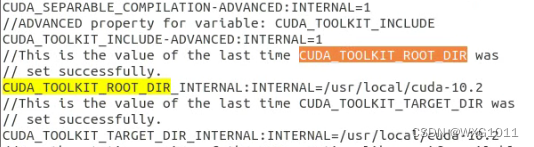
在catkin_make编译时,出现如下问题
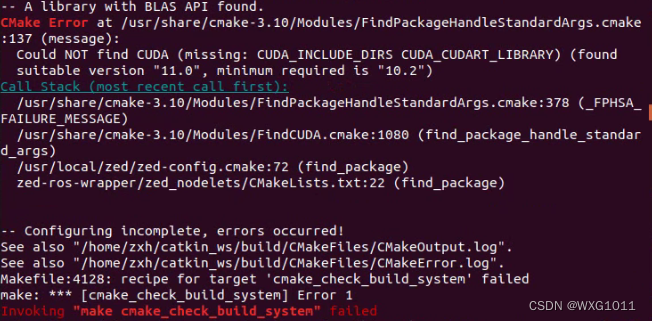
先安装的cuda11.0,卸载之后又安装的cuda10.2,所以会导致上述错误。
解决方案:















 6561
6561











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









