






一、三轴增稳技术核心原理
结构设计
三轴云台由三个相互垂直的框架构成:
俯仰轴:控制相机的上下倾斜;
横滚轴:控制相机的左右倾斜;
航向轴:控制相机的水平旋转。
通过三轴电机驱动和齿轮传动,实现高精度姿态调节(如大疆禅思Z30的抖动控制在0.01°以内)。
传感器与反馈系统
IMU(惯性测量单元):集成陀螺仪和加速度计,实时检测云台姿态变化并反馈至控制器。
电机码盘/磁编码器:用于精确测量电机转动角度,实现闭环控制。
控制算法
PID控制:经典算法用于消除姿态偏差,但需优化参数以适应复杂场景;
模糊PID:结合模糊逻辑动态调整参数,提升响应速度和精度;
自适应Kalman滤波**:抑制环境噪声,增强系统鲁棒性。
电机驱动与减震技术
高精度无刷电机:要求低延迟、高扭矩响应(如毫秒级调整);
减震设计:采用软胶减震球或弹性材料隔离高频振动,避免机械共振。
二、技术难点与挑战
多轴协同控制的实时性
需在毫秒级内同步处理三个轴向的姿态补偿,对控制算法的计算效率和硬件性能要求极高。例如,大疆云台需在100Hz以上的数据更新频率下保持稳定。
传感器精度与抗干扰
陀螺仪易受温度漂移影响,需恒温控制模块(如加热片+保温层)维持传感器稳定性。
振动和电磁干扰可能导致编码器信号失真,需采用磁编码器或冗余设计提升抗干扰能力。
机械结构与轻量化平衡
复杂齿轮传动系统需避免虚位误差(如采用扇形齿轮和精密啮合设计)。
碳纤维材料虽轻量化,但需兼顾结构刚度,防止高速飞行中的共振问题。
环境适应性
极端天气:低温导致电机扭矩下降,高温引发传感器漂移;
电磁干扰:城市或高压线附近需增强信号屏蔽和滤波设计。
功耗与散热管理
高功率电机和处理器持续工作易导致发热,需高效散热系统(如独立风道+风扇)。
长时间作业需优化电源管理,避免续航大幅缩短。
三、典型解决方案与创新方向
硬件创新
采用柔性云台结构或仿生设计,提升机械响应速度;
集成激光雷达或毫米波雷达辅助测距,增强复杂环境下的稳定性。
算法优化
结合深度学习预测目标运动轨迹,提前补偿姿态偏移(如大疆“指点变焦”功能);
多传感器数据融合(视觉+IMU+GPS),提升动态场景的适应能力。
材料与工艺突破
航空铝合金与碳纤维复材结合,实现轻量化与高强度;
3D打印定制齿轮组件,减少传动误差。
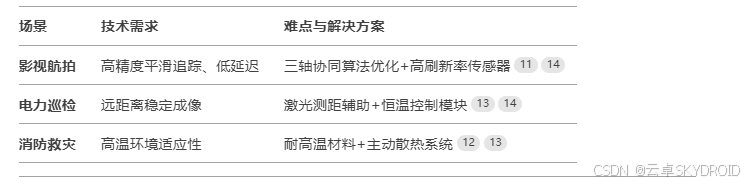
四、应用场景与性能对比


















 1220
1220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









