






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
合成孔径雷达(Synthetic Aperture Radar,SAR)图像目标检测识别技术在军事和民用等领域都发挥着重要作用。SAR图像由于存在透视收缩、叠掩、阴影等几何特点,在图像检测识别上存在许多困难。另一方面,由于SAR图像本身数据量大以及检测识别算法运算复杂等因素,进一步增大了SAR图像检测识别实时处理的难度。本文针对SAR图像目标检测识别实时处理的需求,对SAR图像目标检测识别算法进行了研究分析,研制了能满足实时处理需求的高速信号处理板卡,并基于信号处理板卡实现了检测识别算法,最后在信号处理板卡上对SAR图像检测识别算法的功能和性能进行了测试与验证。
三维加速度的存在,使CTSAR的斜距更趋复杂,从而增加了CTSAR信号处理的难度。传统直线运动轨迹合成孔径雷达(Linear Trajectory Synthetic Aperture Radar,LTSAR)下的成像算法不再适用。本课题以CTSAR高分辨率成像为目的,以频域和时-频域相结合的实时成像处理框架为前提,分析具有三维空间速度和加速度的CTSAR信号特性,并探索信号聚焦技术。首先,由CTSAR系统的几何模型,建立斜距表达式。在曲线运动轨迹模式下,结合SAR平台的运动特性,按照运动学理论,将曲线运动分解为X、Y、Z三个坐标轴方向的运动,每个方向均存在初始速度和加速度。根据三维几何模型搭建三维数学模型,构建斜距历程的函数表达式。由于机载CTSAR的复杂斜距模型限制了后续成像算法的构建,所以对该斜距模型分别进行Taylor近似和Chebyshev近似,从而降低了成像算法设计的复杂度,为CTSAR高分辨率成像算法的研究奠定基础。其次,根据机载CTSAR的斜距,建立回波信号模型。利用驻留相位原理和级数反演法将回波信号变换到二维频域,得到回波信号的二维频谱表达式。曲线历程使二维频谱的距离和方位的耦合更为复杂,增加了曲线SAR成像处理的难度。为此,论文分别利用Legendre和Chebyshev多项式对二维频谱进行正交分解近似,以达到解除耦合,实现相位补偿的目的。在此基础上,提出适用于机载CTSAR的扩展的频域成像算法,推导出了各阶相位补偿函数,实现了曲线轨迹SAR的高分辨率成像,并分析了聚焦质量。最后,针对传统Chirp Scaling成像算法无法满足具有三维速度和加速度的CTSAR的高分辨成像的现状,提出与三维曲线轨迹斜距相匹配的等效Chirp Scaling成像算法。将原始斜距等效成传统直线运动轨迹模式下的双曲斜距模型,再加上斜距补偿项。此等效斜距确保了成像的分辨率。推导了与等效斜距模型匹配的等效Chirp Scaling算法中的回波信号和频域中相应的相位函数。通过仿真实验证明,此算法的成像品质较好,满足成像要求。
一、引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种先进的雷达技术,具有全天候、全天时成像的特点,以及高分辨率的成像能力。SAR信号处理是SAR技术的核心,它涉及对雷达回波信号的接收、处理、分析和成像等多个环节。本文旨在探讨SAR信号处理的基本原理、关键技术及其发展趋势。
二、SAR信号处理基本原理
SAR信号处理的基本原理是利用雷达天线发射的电磁波照射目标,并接收目标反射回来的回波信号。这些回波信号包含了目标的距离、速度、形状和材质等信息。通过对回波信号进行处理和分析,可以提取出这些信息,并生成目标的图像。
SAR信号处理的主要步骤包括:
- 信号接收:雷达天线接收目标反射回来的回波信号。
- 信号预处理:对接收到的回波信号进行滤波、放大和数字化等处理,以提高信号的信噪比和分辨率。
- 成像处理:利用成像算法对预处理后的信号进行处理,生成目标的图像。成像算法包括距离-多普勒(Range Doppler)算法、Chirp Scaling算法、波数域算法等。
- 图像后处理:对生成的图像进行增强、滤波和分类等处理,以提高图像的质量和可读性。
三、SAR信号处理关键技术
- 宽带信号产生器:用于产生高频、宽带的雷达信号,以提高SAR系统的分辨率和成像质量。
- 高采样率模数变换:将接收到的模拟回波信号转换为数字信号,以便进行后续的数字信号处理。高采样率可以确保信号的完整性和准确性。
- 脉冲压缩技术:通过匹配滤波等方法对发射的宽带信号进行压缩,以提高雷达信号的分辨率和信噪比。
- 运动补偿技术:由于SAR系统通常搭载在移动平台上(如飞机、卫星等),因此需要对平台的运动进行补偿,以确保成像的准确性和稳定性。
- SAR成像算法:包括距离-多普勒算法、Chirp Scaling算法、波数域算法等,用于将接收到的回波信号转换为目标的图像。
- 实时成像处理器:用于实现SAR图像的实时生成和处理,以满足实时监测和快速响应的需求。
四、SAR信号处理发展趋势
- 高分辨率成像:随着雷达技术的不断发展,SAR系统正在向更高分辨率的方向发展。这要求SAR信号处理算法和硬件系统具有更高的性能和精度。
- 实时成像处理:为了满足实时监测和快速响应的需求,SAR信号处理需要实现实时成像处理。这要求算法具有高效性和并行性,同时需要高性能的计算机和专用运算处理芯片的支持。
- 智能化处理:结合人工智能和机器学习技术,可以实现SAR信号的智能化处理。通过训练模型和学习算法,可以自动提取目标特征、识别目标和分类等,提高SAR系统的智能化水平和自动化程度。
- 多极化、多波段成像:SAR系统正在向多极化、多波段的方向发展。这要求SAR信号处理算法能够处理不同极化和波段的回波信号,并生成具有更丰富信息的图像。
- 三维成像技术:随着SAR技术的不断发展,三维成像技术将成为未来的一个重要方向。通过结合多个SAR系统的观测数据,可以实现目标的三维成像和重建,为地形测绘、地质勘探等领域提供更准确的信息。
五、结论
SAR信号处理是SAR技术的核心,它涉及多个关键环节和关键技术。随着雷达技术的不断发展,SAR信号处理正在向高分辨率、实时成像、智能化处理、多极化多波段成像和三维成像等方向发展。这些技术的发展将为SAR系统在军事侦察、地形测绘、地质勘探等领域的应用提供更广阔的空间和更强大的支持。
📚2 运行结果
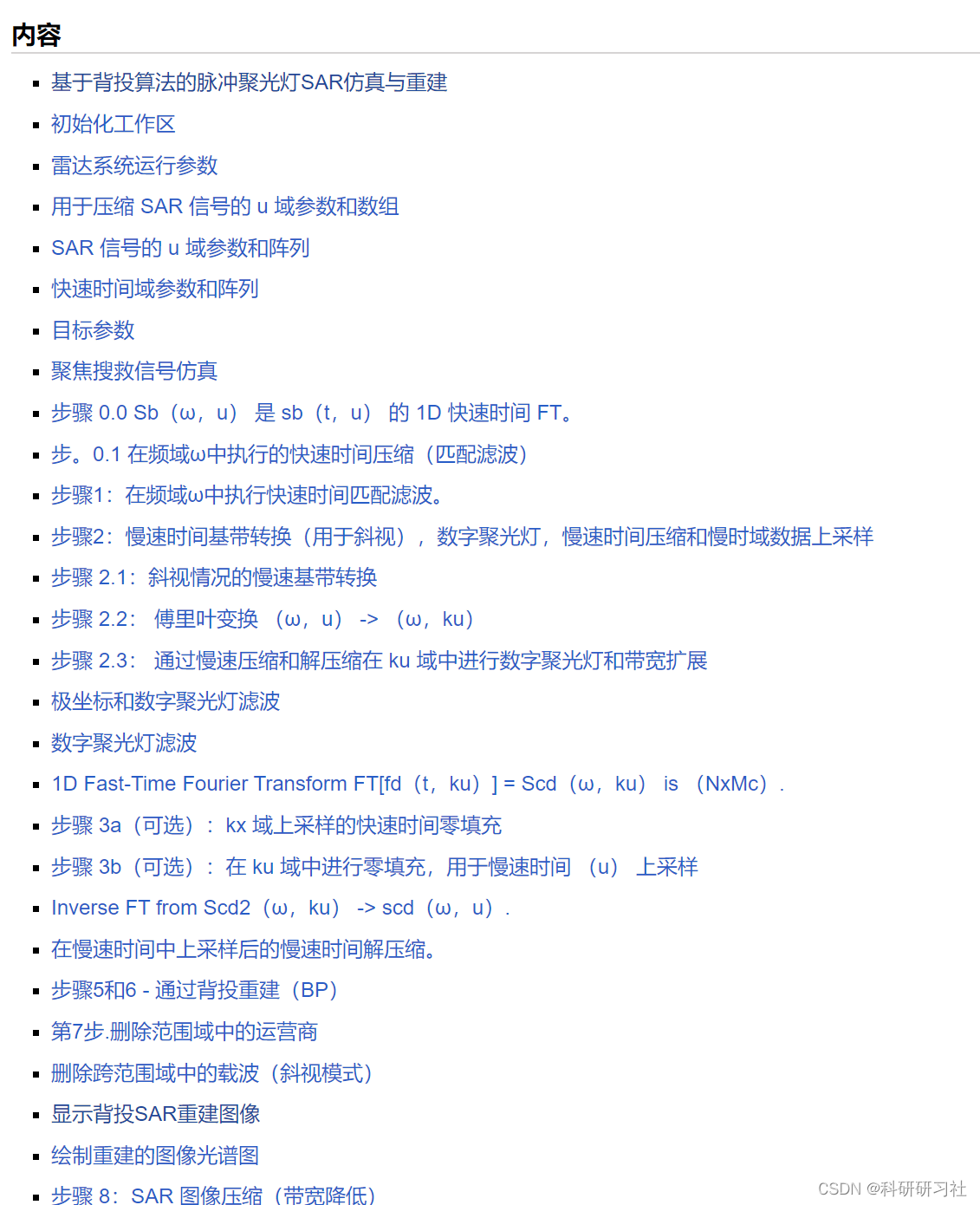
这里展现部分运行结果:
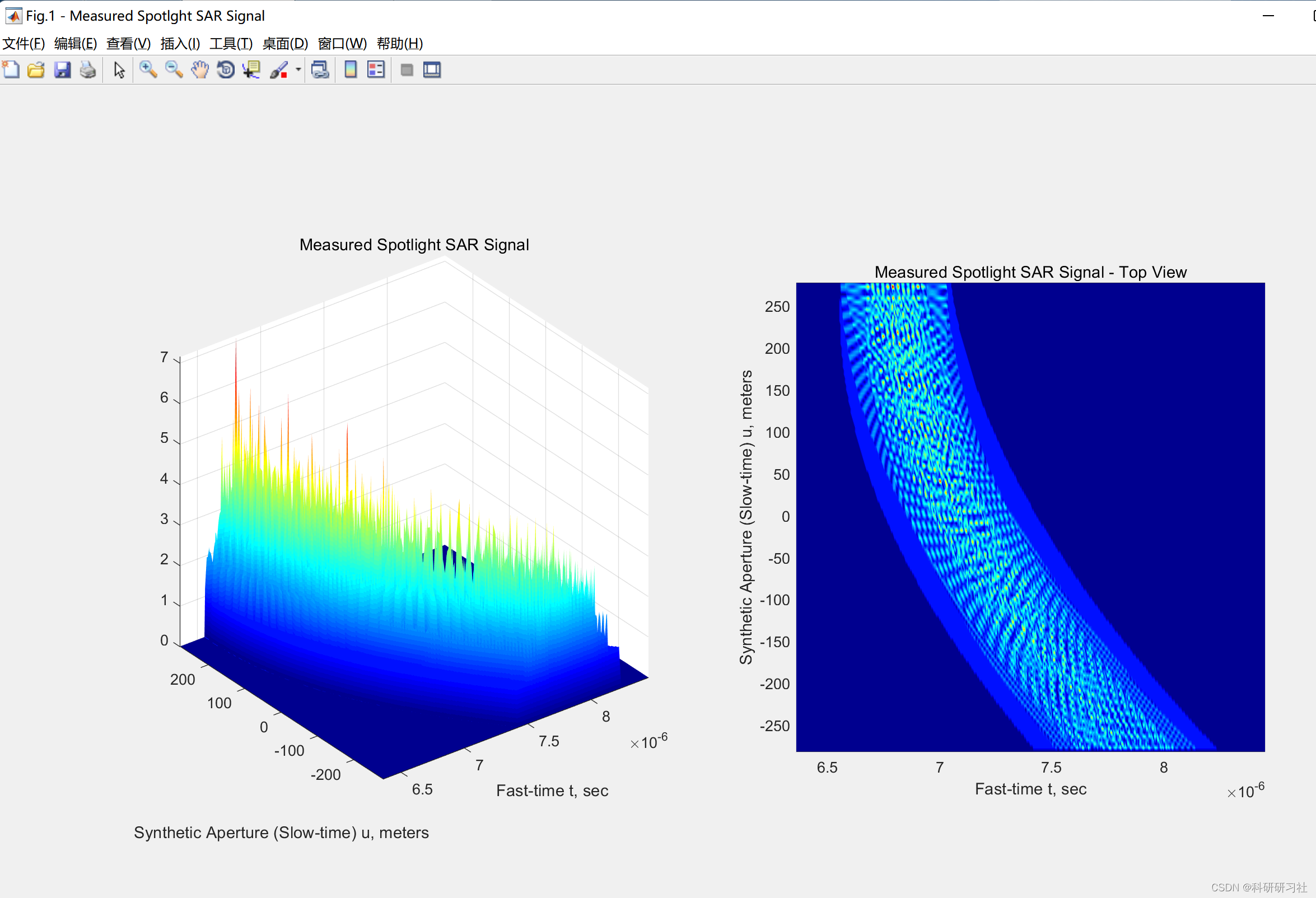
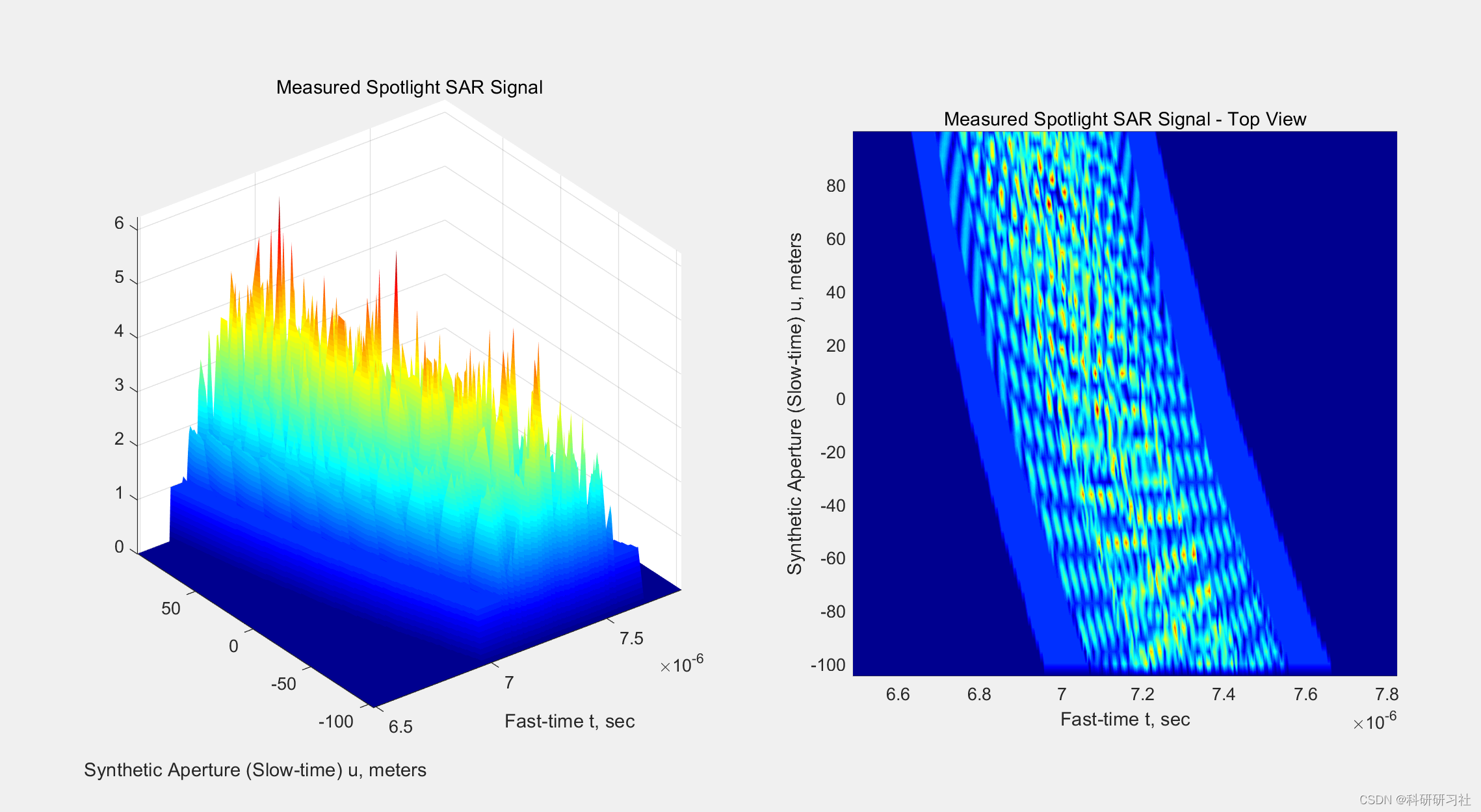

部分代码:
%% Fresnel Approximation of a PM Signal by a Chirp Signal
%% Workspace Initialization.
clc; clear; close all;
%% Radar System Parameters
c = 3e8; % propagation speed
fc = 250e6; % frequency
lambda = c/fc; % Wavelength
k = 2*pi/lambda; % Wavenumber
Xc = 2e3; % Range distance to center of target area
%% Case 1: Broadside Target Area
L = 300; % synthetic aperture is 2*L
Y0 = 100; % target area in cross-range is within [Yc-Y0,Yc+Y0]
Yc = 0; % Cross-range distance to center of target area
du = 0.05;
u = -L:du:L;
xn = Xc;
yn = 50;
%% Signal Definitions - Fresnel Approximation
% $$\exp[-j2k \sqrt{x_n^2 + (y_n - u)^2}] \approx \exp\Bigg[-j2kx_n -
% j\frac{k(y_n - u)^2}{X_c}\Bigg]$$
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%$%
% Program to compare between the original PM signal and %
% Fresnel Approximation %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%$%
% Original Spherical PM Signal:
PM = exp(-1i*2*k*sqrt(xn^2+(yn-u).^2));
% Fresnel Chirp Approximation:
FA = exp(-1i*2*k*(xn+((yn-u).^2)/Xc/2));
%% Plot the Spherical PM and Chirp Approximation Signals.
h1 = figure('NumberTitle', 'off','Name','Comparison of PM and Fresnel Approximation', ...
'Position', [100 0 1200 1000]);
subplot(2,2,1)
plot(u,real(PM))
title('Spherical PM (blue) - Fresnel Chirp Approx. (red)')
hold on;
plot(u,real(FA),'r.')
xlabel('Synthetic Aperture u, meters')
ylabel('Real Part')
axis([-250 250 1.25*min(real(PM)) 1.25*max(real(PM))]);
grid on;
subplot(2,2,2)
plot(u,real(PM) - real(FA),'g.')
xlabel('Synthetic Aperture u, meters')
ylabel('Real Part')
title('Real Part Approximation Error')
grid on;
axis([-250 250 1.25*min(real(PM)) 1.25*max(real(PM))]);
grid on;
subplot(2,2,3)
plot(u,imag(PM))
hold on;
plot(u,imag(FA),'r.')
title('Spherical PM (blue) - Fresnel Chirp Approx. (red)')
xlabel('Synthetic Aperture u, meters')
ylabel('Imaginary Part')
axis([-250 250 1.25*min(imag(FA)) 1.25*max(imag(FA))]);
grid on;
subplot(2,2,4)
plot(u,imag(PM) - imag(FA),'m.')
xlabel('Synthetic Aperture u, meters')
ylabel('Imaginary Part')
title('Imaginary Part Approximation Error')
grid on;
axis([-250 250 1.25*min(imag(FA)) 1.25*max(imag(FA))]);
grid on;
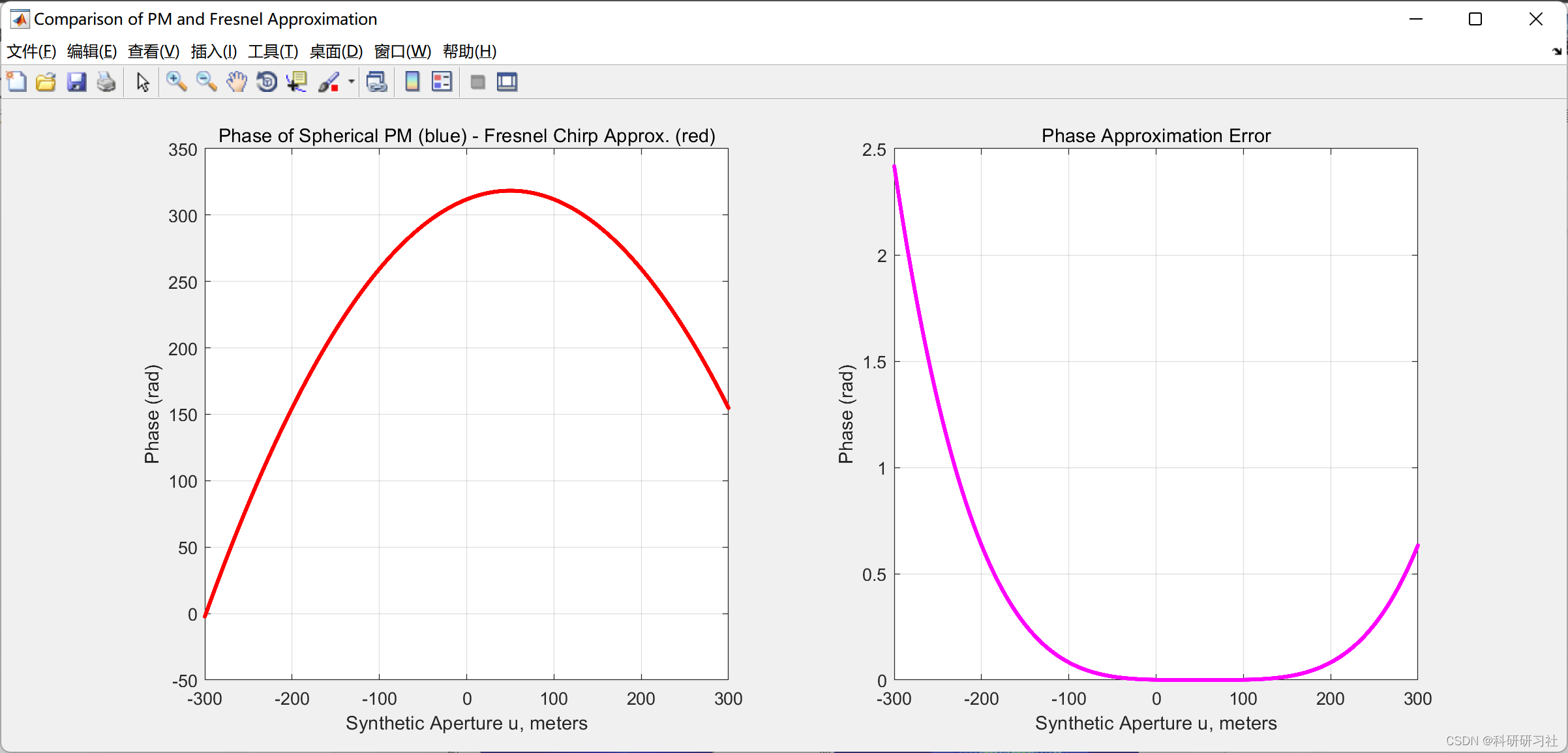
%% Phase Comparison
h2 = figure('NumberTitle', 'off','Name','Comparison of PM and Fresnel Approximation', ...
'Position', [100 0 1200 500]);
subplot(1,2,1)
plot(u,unwrap(angle(PM)))
hold on;
plot(u,unwrap(angle(FA)),'r.')
title('Phase of Spherical PM (blue) - Fresnel Chirp Approx. (red)')
xlabel('Synthetic Aperture u, meters')
ylabel('Phase (rad)')
grid on;
subplot(1,2,2)
plot(u,unwrap(angle(PM)) - unwrap(angle(FA)),'m.')
xlabel('Synthetic Aperture u, meters')
ylabel('Phase (rad)')
title('Phase Approximation Error')
grid on;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]夏雨. SAR图像目标检测识别算法与实时处理实现[D].电子科技大学,2022.
[2]孟亭亭. 曲线轨迹SAR的信号处理与成像研究[D].华侨大学,2020.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1311
1311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









