






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
📋1 概述
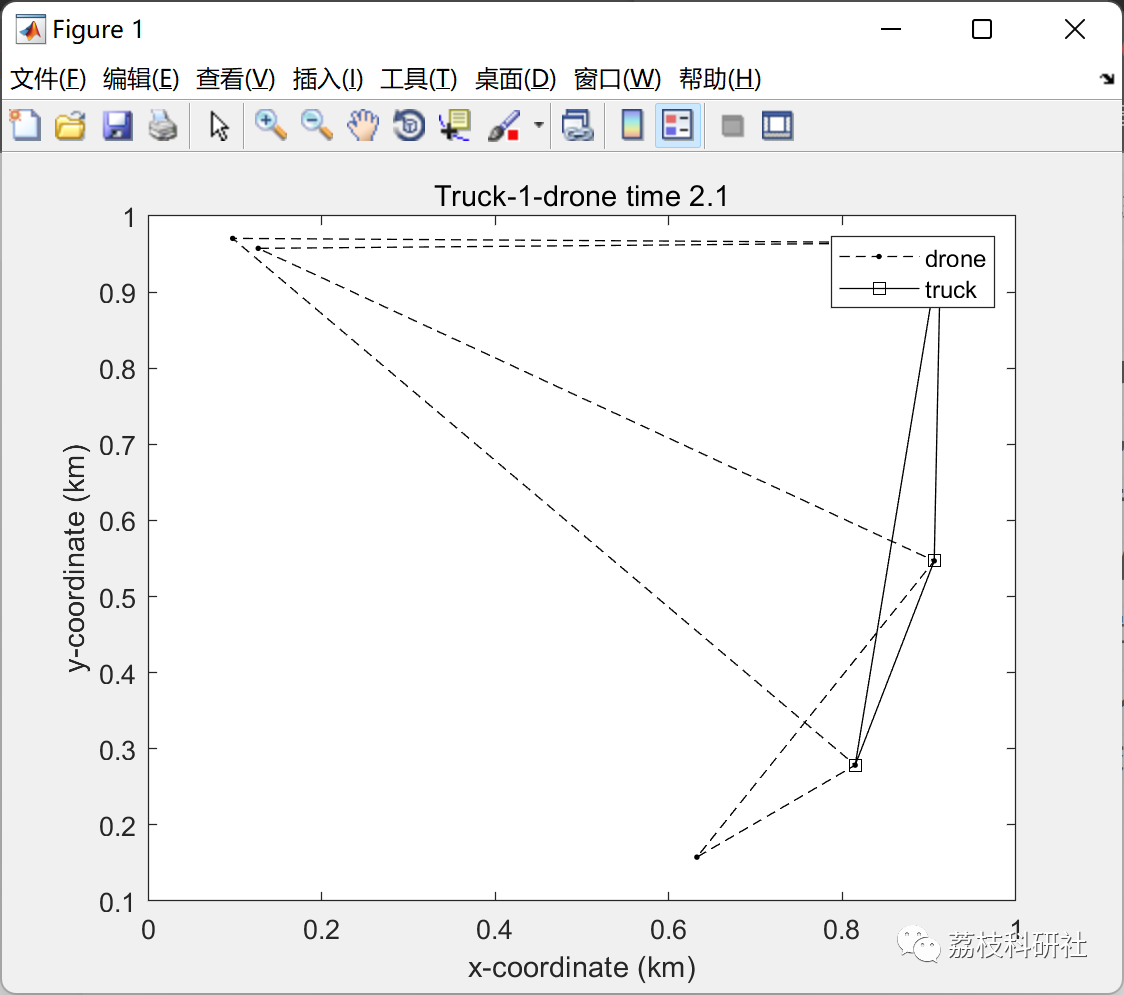
本文利用遗传算法解决了卡车无人机串联或包裹递送操作(即UPS,FedEx)的旅行推销员问题的“最后一英里”问题。每辆卡车都携带一架无人机,该无人机从一个站点发射,将范围内的包裹运送到附近的站点,同时与卡车并行运行。卡车和无人机并行工作以运送包裹。无人机受到航程和容量的限制。因此,它必须作为操作在卡车附近运行。操作是指卡车发射无人机,卡车和无人机运送到不同的位置,然后卡车在会合地点回收无人机以进行电池更换和装载。这个想法是确定卡车和无人机(以及操作)的路线,以最大限度地减少总时间。总时间基于操作(启动-交付-恢复)的时间。操作(卡车或无人机)的最大时间用于计算路径的总时间。
一、引言
旅行推销员问题(TSP)是一个经典的组合优化问题,目标是找到一条访问所有城市恰好一次并最终返回起点的最短路径。随着无人机技术的快速发展,TSP的应用场景得到了极大的扩展,涌现出许多新的变种问题。其中,卡车和无人机协同配送的旅行推销员问题(D2TSP)成为研究热点。在D2TSP中,一辆卡车和多架无人机需要共同完成对多个地点的配送任务,卡车作为主要的运输载体,无人机则辅助完成局部配送,以提高整体配送效率。
二、问题定义
假设有N个城市,其坐标分别为(xᵢ, yᵢ),i=1, 2, ..., N。一辆卡车和若干架无人机需要访问所有N个城市。卡车从起点出发,访问所有城市后返回起点。无人机可以在卡车行驶过程中,从卡车处起飞,访问部分城市后返回卡车。问题的目标是最小化卡车和无人机的总旅行距离或时间。
三、遗传算法概述
遗传算法(Genetic Algorithm, GA)是一种高效的全局优化算法,被广泛应用于解决TSP及其变种问题。遗传算法通过模拟自然选择和遗传机制来搜索最优解,具有原理简单、搜索能力强等特点。
四、基于遗传算法的D2TSP求解方法
1. 编码方案
在D2TSP中,需要设计复杂的编码方式来同时表示卡车和无人机的行程。一种可能的方法是对卡车和每架无人机的路径分别进行编码,或者使用混合编码策略,将卡车和无人机的决策点整合进一个统一的解决方案表示中。
2. 适应度函数
适应度函数定义为总旅行时间的倒数或其他相关指标,以最大化适应度值。在D2TSP中,适应度函数不仅要考虑总行程距离,还要考虑无人机的飞行限制(如续航能力、起飞和降落费用)、货物分配以及主载体与无人机之间的协同工作策略。
3. 遗传算子
为了提高搜索效率和避免早熟收敛,可以对遗传算法的基本算子(选择、交叉、变异)进行改进或创新。例如,引入自适应交叉概率和变异概率,根据当前种群的平均适应度动态调整这些概率。此外,还可以采用精英策略,将上一代最优个体直接复制到下一代,以保留优秀的基因信息。
4. 算法流程
基于遗传算法的D2TSP求解方法通常包括以下几个步骤:初始化种群、计算适应度值、选择个体进行交叉和变异操作、生成新的种群、迭代更新直至满足停止条件(如达到最大迭代次数或找到满足要求的解)。
五、仿真验证与结果分析
为了验证基于遗传算法的D2TSP求解方法的有效性,需要进行仿真验证。仿真验证通常包括选择合适的测试系统(如随机生成的城市坐标)、设置仿真参数(如种群大小、最大迭代次数等)、运行仿真程序并记录优化结果。通过对优化结果进行分析和比较(如有功网损、电压水平等指标),可以评估算法的性能和优劣。
六、结论与展望
基于遗传算法的D2TSP求解方法具有显著的优势,能够在合理的时间内找到高质量的解。未来的研究可以进一步探索更有效的遗传算法参数调整策略、将更复杂的场景(如无人机的续航能力、飞行高度限制以及城市间的障碍物等因素)融入到优化模型中,以及采用其他启发式算法或混合算法来求解D2TSP问题。
📝2 运行结果
部分代码:
% Find the Best Route in the Population
[minDist,index] = min(totalDist);
distHistory(iter) = minDist;
if minDist < globalMin
globalMin = minDist;
optPop2 = pop2(index,:);
optPop1 = pop(index,:);
if showprogress % gaph results
tr_route = (optPop2==0).*optPop1;
tr_route = tr_route(tr_route>0);
tr_route = [tr_route tr_route(1)];
if optPop2(n)==1
dr_route = [optPop1 optPop1(1) ];
else
dr_route = [optPop1 ];
end
plot(xy(dr_route,1), xy(dr_route,2), 'k.--'); hold on;
plot(xy(tr_route,1), xy(tr_route,2),'ks-');
xlabel('x-coordinate (km)');
ylabel('y-coordinate (km)');
legend('drone','truck');
title(sprintf('Truck-1-drone time %1.1f',minDist));
hold off;
drawnow;
end
end
% Genetic Algorithm Operators
randomOrder = randperm(popSize);
for p = 5:5:popSize
% basically a random sampling in matrix format with a
rtes = pop(randomOrder(p-4:p),:);
dists = totalDist(randomOrder(p-4:p));
% what are the min distances?
[~,idx] = min(dists);
% what is the best route
bestOf5Route = rtes(idx,:);
% randomly select two route insertion points and sort
routeInsertionPoints = sort(ceil(n*rand(1,2)));
I = routeInsertionPoints(1);
J = routeInsertionPoints(2);
for k = 1:5 % Mutate the Best row (dist) to get Three New Routes and orig.
% a small matrix of 4 rows of best time
tmpPop(k,:) = bestOf5Route;
switch k
% flip two of the cities and cities between
case 2 % Flip
tmpPop(k,I:J) = tmpPop(k,J:-1:I);
case 3 % Swap
tmpPop(k,[I J]) = tmpPop(k,[J I]);
case 4 % Slide segment
tmpPop(k,I:J) = tmpPop(k,[I+1:J I]);
% tmpPop2(k,I2)=flag;
case 5 % increment sequence one space
tmpPop(k,1:end) = tmpPop(k,[2:end 1]);
otherwise % Do Nothing
end
end
% using the original population, create a new population
newPop(p-4:p,:) = tmpPop;
end
pop = newPop; % update entire populations with mutations
end
res=[optPop2;
optPop1]
end
📃3 参考文献
[1]黄书召,田军委,乔路,王沁,苏宇.基于改进遗传算法的无人机路径规划[J].计算机应用,2021,41(02):390-397.

















 678
678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









