






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
车辆速度控制优化
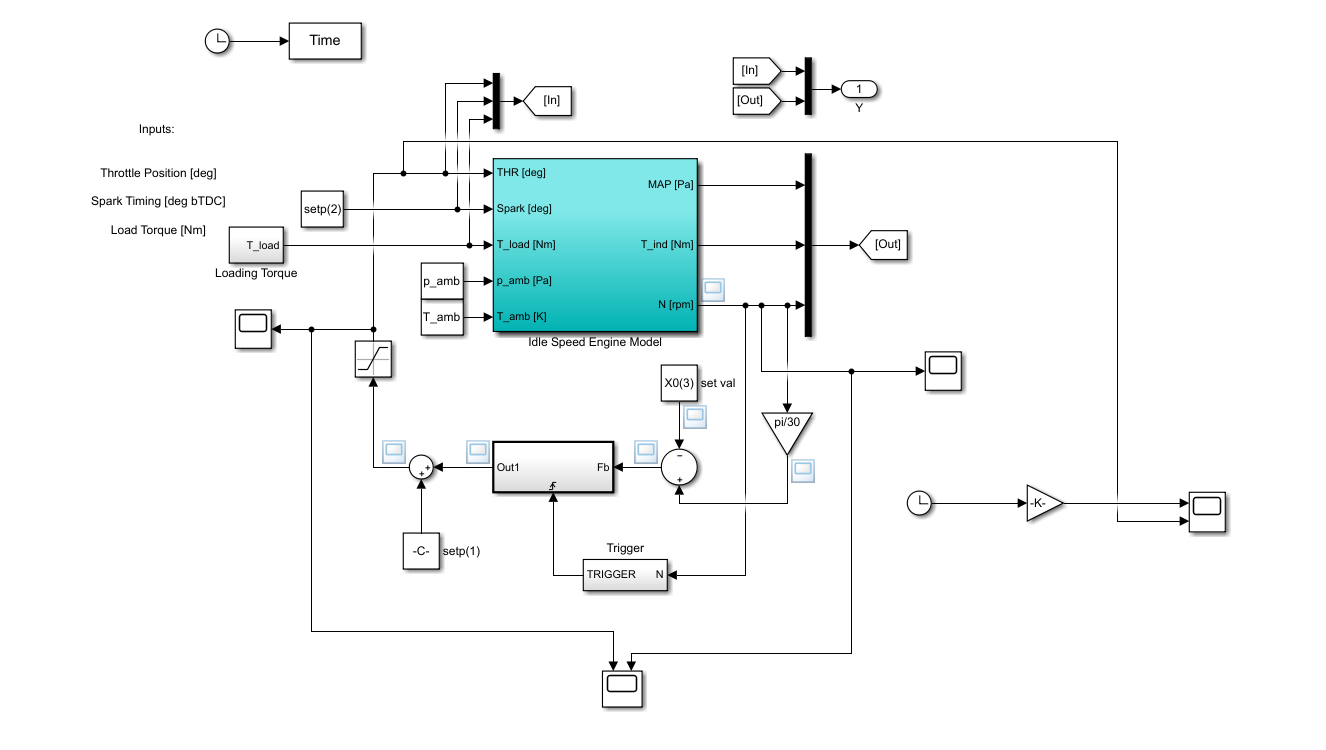
本文基于一个在我们日常生活中相当重要的现实问题。它以内燃机为基础,而内燃机当今在时代是轻型和重型车辆运输中最常见的动力来源。具体而言,我将使用一个高保真度的非线性内燃机模拟器,该模拟器是用MATLAB Simulink编写的,我将分析多种方法来控制发动机怠速。
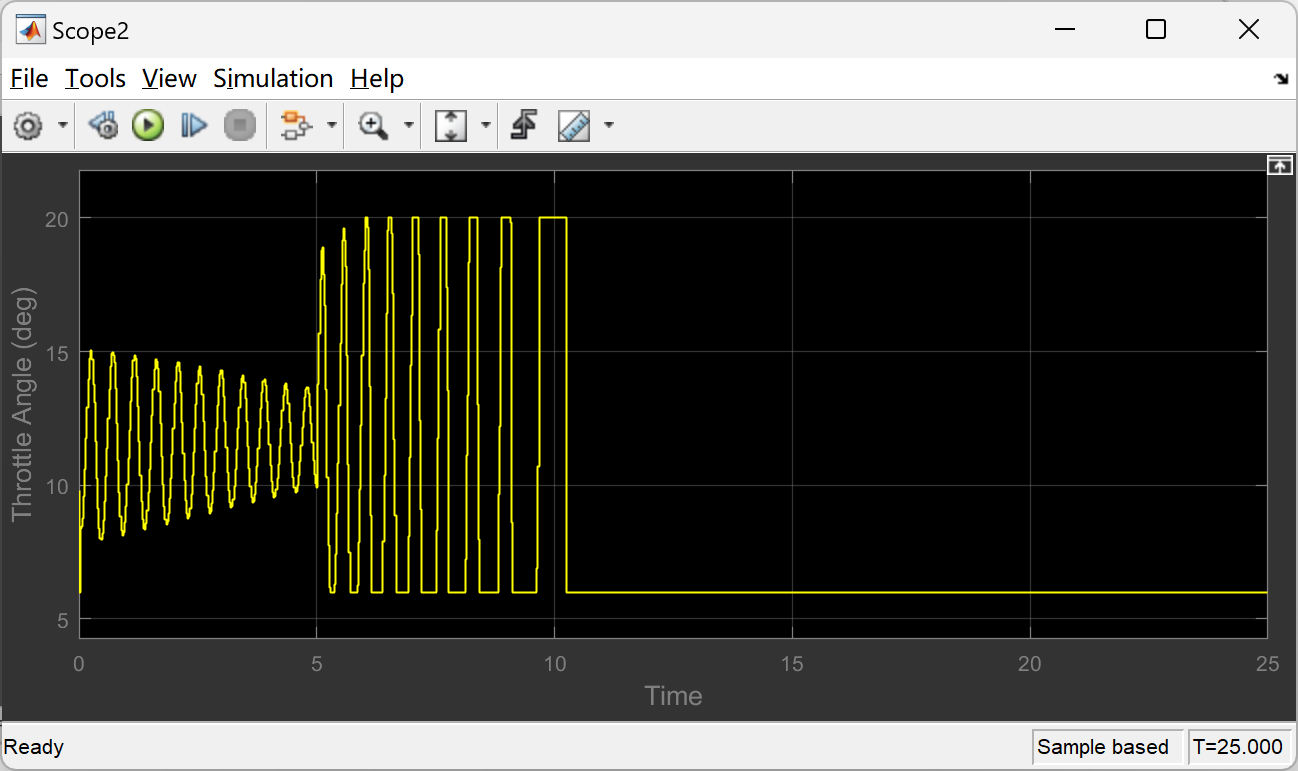
*从技术角度来看,主要目标是让优化循环自动“调整”PID(闭环)增益,以在存在较大负载转矩扰动的情况下实现尽可能好的发动机转速响应。这里的控制输入是节气门角度(节气门的度开)。我们将在开环和闭环模式下测试模拟器。通过使用PID控制器,我们将研究模拟器的闭环行为。
*我们将实现几种优化算法(有约束和无约束),以找到在最短时间内将怠速发动机转速恢复到目标值的最佳方法,并尽量减少转速的波动。
一、怠速控制系统的基本原理与组成
怠速控制系统是维持发动机在无负载条件下稳定运行的核心模块,其核心目标是实现转速稳定性、燃油经济性和排放控制的三重优化。
1. 系统组成
- 传感器层:节气门位置传感器(TPS)、氧传感器、温度传感器、曲轴转速传感器等,实时采集进气量、空燃比、冷却液温度、转速等参数。
- 控制单元(ECU) :基于预存的目标转速MAP图(如冷启动时目标转速较高),通过闭环反馈算法调节执行器。
- 执行机构:怠速控制阀(ISCV)、电子节气门(ETC)、喷油器等,分别控制旁通空气量、主进气量及燃油喷射。
2. 控制原理
怠速控制的本质是进气量与燃油量的动态平衡。ECU通过以下步骤实现闭环调节:
- 初始设定:根据冷却液温度(如低温启动时提高初始喷油量)设定初始空燃比。
- 误差计算:对比目标转速(如750 rpm)与实际转速的偏差,采用PID算法生成控制量。
- 执行调节:通过步进电机调整ISCV开度(分辨率可达0.1°),或直接控制电子节气门微调开度。
- 多参数补偿:对空调启停、发电机负载突变等扰动进行前馈补偿。
二、动力总成控制中的发动机模型类型
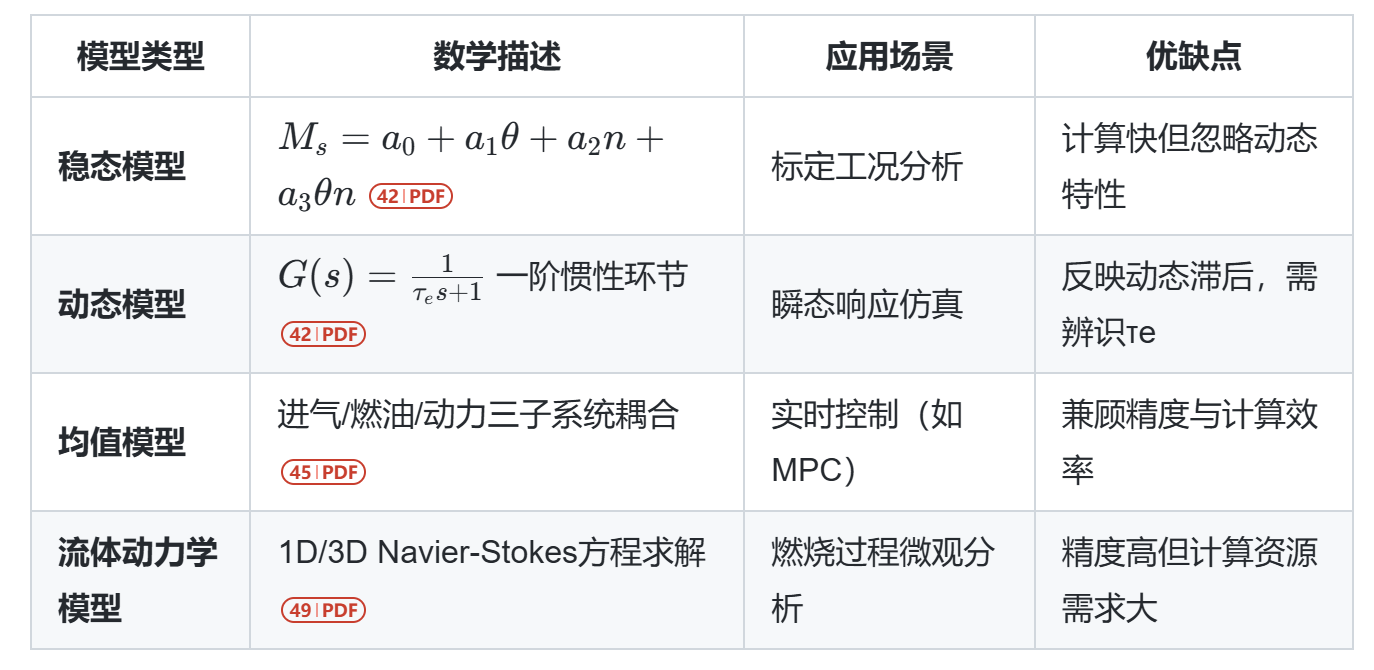
1. 主要模型分类及特点
| 模型类型 | 数学描述 | 应用场景 | 优缺点 |
|---|---|---|---|
| 稳态模型 | Ms=a0+a1θ+a2n+a3θnMs=a0+a1θ+a2n+a3θn | 标定工况分析 | 计算快但忽略动态特性 |
| 动态模型 | G(s)=1τes+1G(s)=τes+11 一阶惯性环节 | 瞬态响应仿真 | 反映动态滞后,需辨识τe |
| 均值模型 | 进气/燃油/动力三子系统耦合 | 实时控制(如MPC) | 兼顾精度与计算效率 |
| 流体动力学模型 | 1D/3D Navier-Stokes方程求解 | 燃烧过程微观分析 | 精度高但计算资源需求大 |
2. 模型在怠速控制中的应用案例
- 均值模型(MVEM) :Panse(2005)通过建立动态均值模型,实现±10 rpm的稳态控制精度。
- 状态空间模型:红旗研发总院通过一维燃料电池模型(精度≥92%)优化氢气利用率至98%。
- 混合模型:Albertoni(2003)结合离散事件与连续变量模型,将燃油消耗降低15%。
三、离散PID控制器的设计与优化
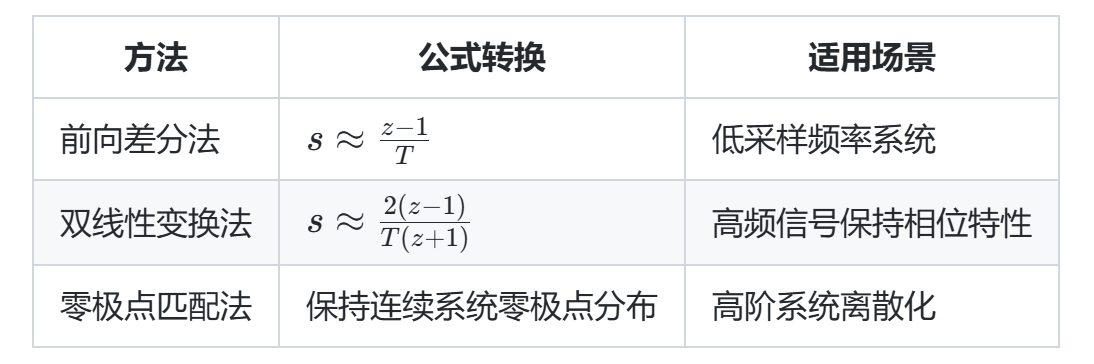
1. 离散化方法对比
2. PID参数整定策略
- Ziegler-Nichols法:通过临界比例度法确定初始参数,响应时间缩短30%。
- 模糊自整定:Yildiz(2024)采用自适应模糊PID,在负载突变时超调量降低至2%。
- 增量式PID:在氢燃料发动机控制中,增量式算法使转速波动率<1.5%。
3. 改进型PID结构
- 带死区PID:当转速偏差<5 rpm时停止积分,避免高频振荡。
- 前馈-PID复合控制:对空调压缩机启停扰动实现毫秒级补偿。
四、关键性能指标与优化方向
1. 核心评价参数
| 指标类型 | 典型值范围 | 测量方法 |
|---|---|---|
| 稳态转速误差 | ±10 rpm | 高精度转速计(0.1%精度) |
| 燃油消耗率 | 0.4-0.6 L/h | 碳平衡法 |
| HC排放量 | 50-100 ppm | FTIR光谱分析 |
| 响应时间(0→90%) | 0.5-1.5 s | 阶跃负载测试 |
2. 前沿优化技术
- 模型预测控制(MPC) :Di Cairano(2024)通过滚动优化将瞬态超调抑制在3%以内。
- 神经网络补偿:利用LSTM网络预测负载变化,控制延迟降低40%。
- 多物理场耦合仿真:结合GT-POWER与MATLAB/Simulink实现控制-燃烧协同优化。
五、研究挑战与发展趋势
- 模型-控制器协同设计:需解决均值模型在低温启动时的非线性偏差问题。
- 硬件在环(HIL)验证:提高仿真模型与实车数据的匹配度(目标>95%)。
- 新能源动力总成适配:燃料电池的"零功率怠速"技术将效率提升至55%。
- 智能诊断技术:基于GAN网络的故障模式生成技术,实现98%的故障识别率。
当前研究正朝着高精度建模、智能控制算法和多目标协同优化方向发展,以满足日益严格的排放法规(如国六b)和新能源转型需求。
📚2 运行结果
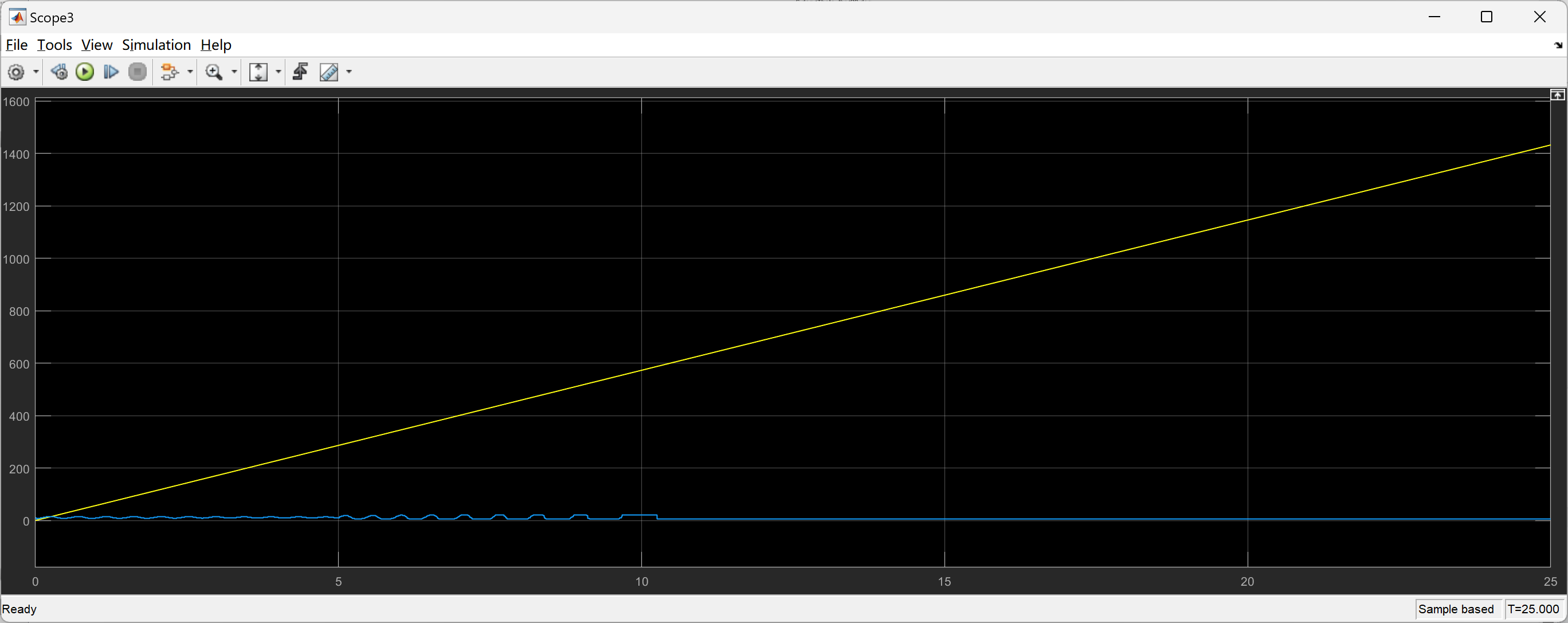
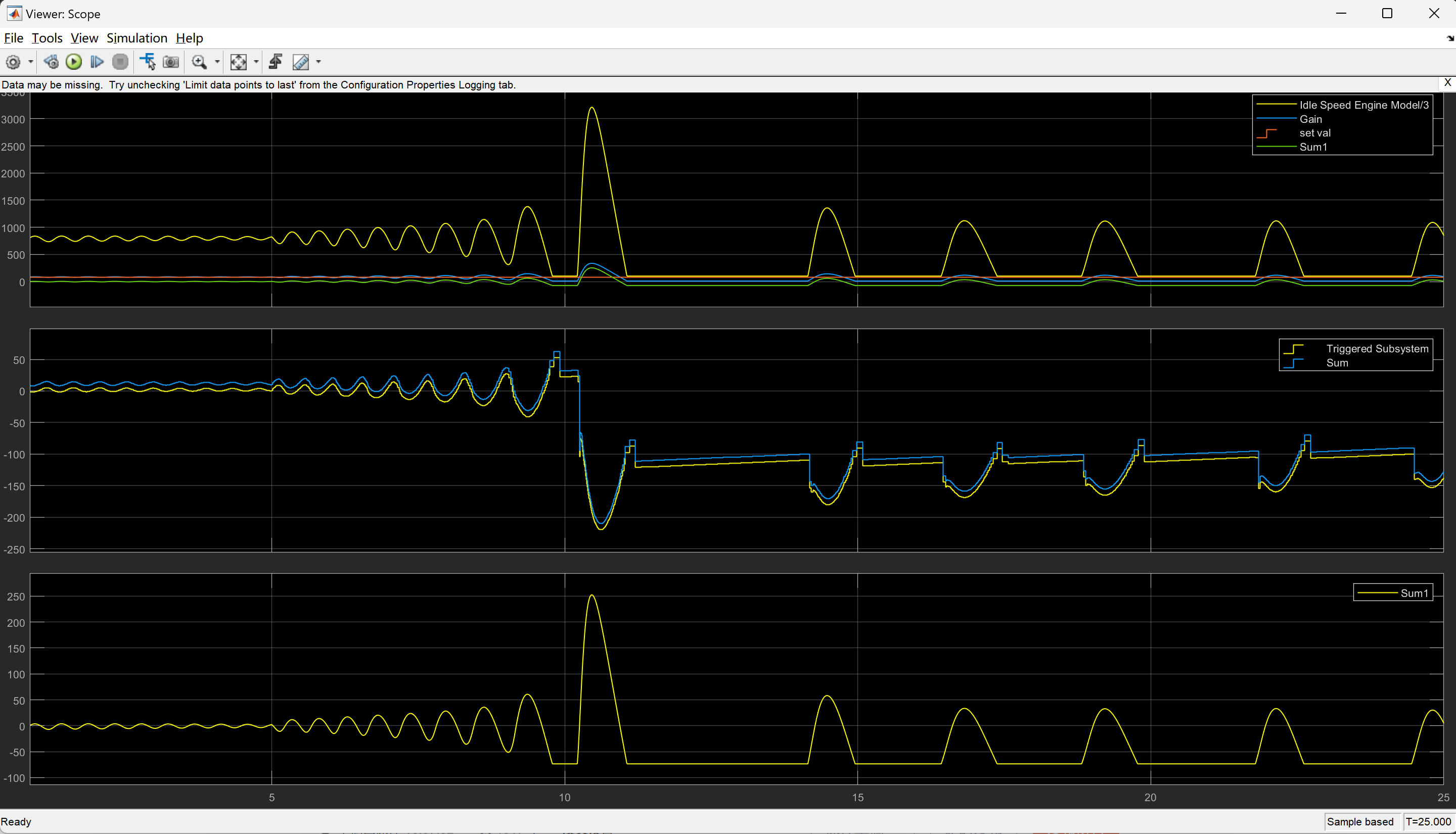
部分代码:
% Load engine geometric parameters and constant inputs
Vd = 2.4e-3; % Displacement (m^3)
Z = 4; % Number of Cylinders
Vm = 5.8e-3; % Intake Manifold Volume (m^3)
J = 0.0789; % Mass moment of inertia
p_amb = 1.0121*1e5;
T_amb = 302;
R=288;
gam = 1.35;
P0 = 26431; % Initial MAP
N0 = 828; % Initial RPM
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Model parameters (from steady-state calibration)
a = [1.69e-07,-1.136e-06,6.89e-06]; % Throttle
si = 0.812; yi = 0.0633; % Volumetric efficiency
P_IMEP = [0.0220,-1.1649]; % IMEP
par_sp = [-0.0017 -0.0277 1.36]; % Spark timing effect
par_fr = [7.4198e-7 -4.989e-4 11.3]; % Friction
par_IMEP0 = [1.2323e-4 2.1256]; % Base IMEP model
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Conversion to Crank Angle Domain
% Coefficients for crank-angle based model
Kthr = p_amb/sqrt(R*T_amb)*sqrt(gam)*sqrt((2/(gam+1))^((gam+1)/(gam-1)));
Kp1 = R*T_amb/Vm;
Kp2 = si*Vd/(4*pi*Vm);
Kp3 = yi*Vd/(4*pi*Vm);
KT = 1e5*Vd/(4*pi);
Kfr1 = (30/pi)^2 * par_fr(1);
Kfr2 = (30/pi) * par_fr(2);
Kfr3 = par_fr(3);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Calculate Equilibrium Condition (p_0 T_0 w_0)
setp(1) = 9.81; % Throttle Position
setp(2) = -25; % Spark Timing
setp(3) = 10; % Load Torque
X0 = [26424 21.3765773202354 83.9019428270409]; % Equilibrium Conditions
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Linearization
% Coefficients for linearized model as shown in lecture
K1 = Kp1*Kthr*(2*a(1)*setp(1)+a(2));
K2 = Kp1*Kthr*(a(1)*setp(1)^2 + a(2)*setp(1) + a(3));
K3 = Kp2;
Kp = KT*par_IMEP0(1)*(par_sp(1)*setp(2)^2 + par_sp(2)*setp(2) + par_sp(3)); % Pressure multiplier
Kt = KT*(par_IMEP0(1)*X0(1) - par_IMEP0(2)) * (par_sp(1)*setp(2) + par_sp(2)); % Spark Timing multiplier
Kf = 2*Kfr1*X0(3)^2 + Kfr2*X0(3);🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]孙晓娜,郑轶,王道静,等.基于PID算法的车用天然气发动机怠速闭环控制研究[J].车用发动机, 2010(2):5.
[2]周兆爽,付景顺,王荔楠.基于模糊PID—Smith控制的汽车怠速控制方法的研究[J].机械设计与制造, 2007(2):3.
[3]罗小青,黄云奇.基于PID-Fuzzy理论的发动机怠速控制系统研究[J].小型内燃机与摩托车, 2010, 39(3):4.
🌈4 Matlab代码、Simulink仿真下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1156
1156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









