






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
参考文献:

本文采用的是换一个算法解决, 基于非支配排序多目标遗传优化算法求解分布式能源的选址与定容。
将可再生能源的分布式发电技术与大电网结 合,是 普 遍 公认的节能减排、绿色 环 保、安全可靠的电力系统运行方式, 是电力发展的方向。分布式电源(DG)是指在一定的地域范围内,以分散方式布置在用户附近, 与环境兼容的小型模块化发电单元,其发电功率为几千瓦到 几十兆瓦。
分布式发电系统目前大多与配电网并网运行。DG 入 电 网后,会对配电网的潮流分布产生影响,进而可以优化配电网 络,缓解配电网输 配 用 电 压 力。但 是 由 于 DG 的 投 入 和 退出有很大的随 机 性,且输出功率的稳定性易受环境影响,因此,DG的不当接入会对电网产生诸多负面影响,如 影 响 配 电网的稳定性及电压质量,产 生 谐 波 等。这 些 影 响 的 大 小 与DG的容量和接入位置有很大关,因此,DG 的选址定容是在 DG规划阶段中需要考虑的重点问题。
由于规划的优化目标较为单一,传 统 的 规 划 方 法 无 法 很 好地解决这一问题。近 年 来,考 虑 电 压、电流质量和环境等因素的多目标优化迅速发展,但量纲的不统一,使得求解的复杂性大大提高,给多目标优化提出了新的挑战。本文在 研究标准粒子群优化算法的基础上,针 对 配 电 网 中 DG 的 选址定容问题,建立了包括有功率损耗、电压质量及接入 DG 的总容量为目标函数的数学模型,运用模糊理论将多目标优化模型转化为基于模糊隶属度的单目标优化模型,并利用非支配排序多目标遗传优化算法进行优化。在IEEE14标准节点测试系统上进行仿真,提出了具有实用价值的 DG配置方案。
1.1 功率损耗
电能在从发电端传输到负载端的过程中,输电线路上产生的电能损耗不可址 见,只议r地减小有功功率损耗,提理地配置配电网中的 DG,可以有效地减小有功功率损耗,提高发电利用率,节约能量。基于有功功率损耗的目标函数最优数学表达式为:

1.2 电压质量
某些状况下,电力系统在遭受干扰后的几秒或几分钟内,系统中的某些母线电压可能经历大幅度﹑持续性降低,从而使得系统的完整性遭到破坏,功率不能正常地传送给用户。这种灾变称为系统电压不稳定﹐其灾难后果则是电压崩溃。通常用静态电压稳定指标来表示系统电压稳定性。配电网中电
压质量受配电系统的电压稳定性影呵。今乂术用能T网P电压基于期望电压的方差来描述电压质量。基于电压质量的目标函数最优数学表达式为:

1.3 DG总容量
在实际应用中不仅要考虑改善电网带来的经济效应,还需要考虑DG安装、运行和维护的成本费用问题。本文中不涉及经济模型,仅考虑接入配电网的DG总容量。基于DG总容量的目标函数最优数学表达式为:

分布式能源选址与定容问题的定义及关键影响因素
分布式能源选址与定容问题的定义及关键影响因素如下:
定义
分布式能源选址与定容问题是指在配电网规划中,确定分布式能源(如光伏、风电、储能等)的最佳安装位置和容量规模,以实现能源利用最大化、成本最小化和系统性能优化的目标。这一问题涉及多目标优化,通常包括以下几个方面:
- 功率损耗:最小化系统的电能损耗。
- 电压质量:提高系统的电压稳定性,减少电压波动。
- 经济性:降低系统的建设和运行成本。
- 环境影响:减少碳排放和其他环境污染。
关键影响因素
- 系统需求与负荷分布:分布式能源的选址和定容需要根据配电网的实际负荷分布和未来负荷预测进行优化,以确保能源供应与需求的匹配[27]。
- 环境因素:分布式能源的出力受环境条件(如光照、风速)影响较大,需要考虑这些不确定性[22]。
- 经济成本:包括设备投资成本、运行维护成本以及可能的补贴政策等[6]。
- 技术约束:包括功率平衡、节点电压、电流、装机容量等技术约束条件[2]。
- 政策与法规:不同地区的储能最低配置政策、可再生能源配比要求等[2]。
- 多目标优化:需要在多个目标之间进行权衡,如降低网损、提高电压稳定性、降低运行成本等[1]。
- 智能优化算法:采用粒子群算法、遗传算法、人工鱼群算法等智能优化算法来解决选址定容问题,提高寻优效果。
优化方法
- 多目标优化模型:将多个目标函数(如网损、电压质量、经济性)转化为单目标模型,通过模糊理论或非支配排序方法进行求解。
- 智能优化算法:如粒子群优化算法、遗传算法、人工鱼群算法等,结合局部搜索策略,提高全局寻优能力。
- 数学建模与仿真:建立精确的数学模型,通过Matlab等工具进行仿真验证,确保模型的可行性和有效性。
综上所述,分布式能源选址与定容问题是一个复杂的多目标优化问题,需要综合考虑系统需求、环境因素、经济成本、技术约束和政策法规等多方面因素,采用合适的优化方法和技术手段进行解决。
非支配排序多目标遗传优化算法(NSGA-II)基本原理
非支配排序多目标遗传优化算法(NSGA-II)是一种用于解决多目标优化问题的进化算法,由Deb等人于2002年提出。其基本原理和流程如下:
- 初始化种群:随机生成初始种群,每个个体代表一个解,适应度值表示目标函数的求解结果[42]。
- 计算适应度:评估每个个体在每个目标函数下的适应度值[35]。
- 非支配排序:根据其他个体对个体的支配次数对群体中的每个个体进行分层,执行非支配排序。一个解支配另一个解,如果对于所有目标函数,该解在所有目标上都不劣于另一个解,并且至少在某个目标上优于另一个解[56]。
- 计算拥挤距离:对于层次中的每个个体,计算其在特定目标函数下的拥挤距离。拥挤距离衡量个体在目标空间中的邻近个体数量,用于保持种群多样性[35]。
- 选择操作:根据非支配水平和拥挤距离选择下一代个体,偏好非支配水平高和拥挤度高的个体[35]。
- 交叉和变异操作:对选定的个体进行交叉和变异操作以生成下一代[35]。
- 合并种群:将父代种群和子代种群合并成一个规模为2N的种群,进行快速非支配排序,并根据非支配序列号重新分类所有个体[52]。
- 迭代重复:重复步骤2-7,直到满足停止条件(如达到最大迭代次数或找到满意解)[42]。
NSGA-II的主要特点包括:
- 快速非支配排序:通过改进的排序方法,将计算复杂度从O(MN^3)降低到O(MN^2),其中M是目标数量,N是种群大小[55]。
- 精英策略:保留当前最优个体,加速收敛[55]。
- 拥挤距离:维护种群多样性,确保不同个体之间的均匀分布[55]。
NSGA-II广泛应用于工程设计、交通流优化、资源分配、生物信息学和经济模型优化等领域。通过其独特的机制和参数优化,NSGA-II为解决多目标优化问题提供了强大的工具,适用于复杂多目标优化场景。
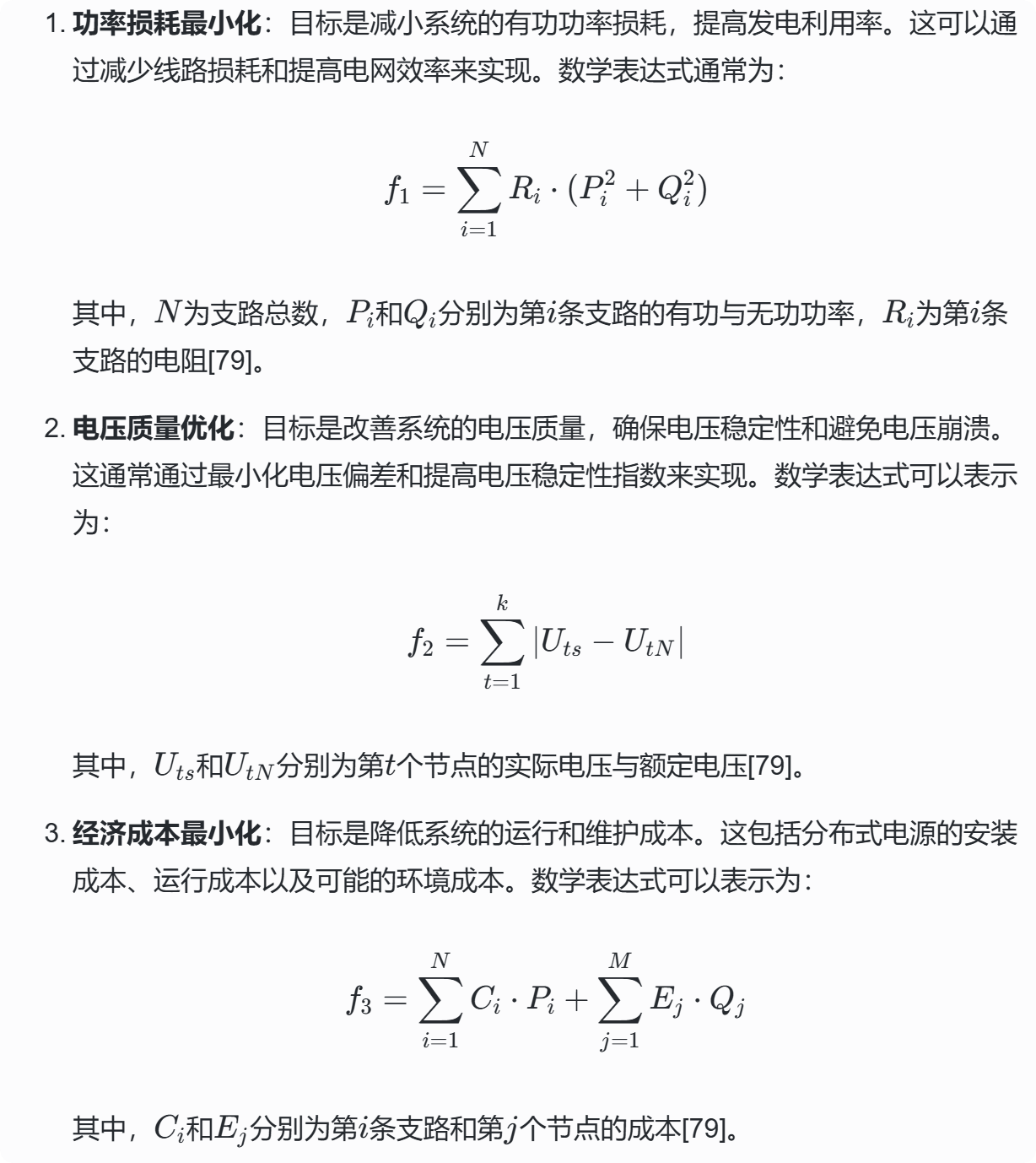
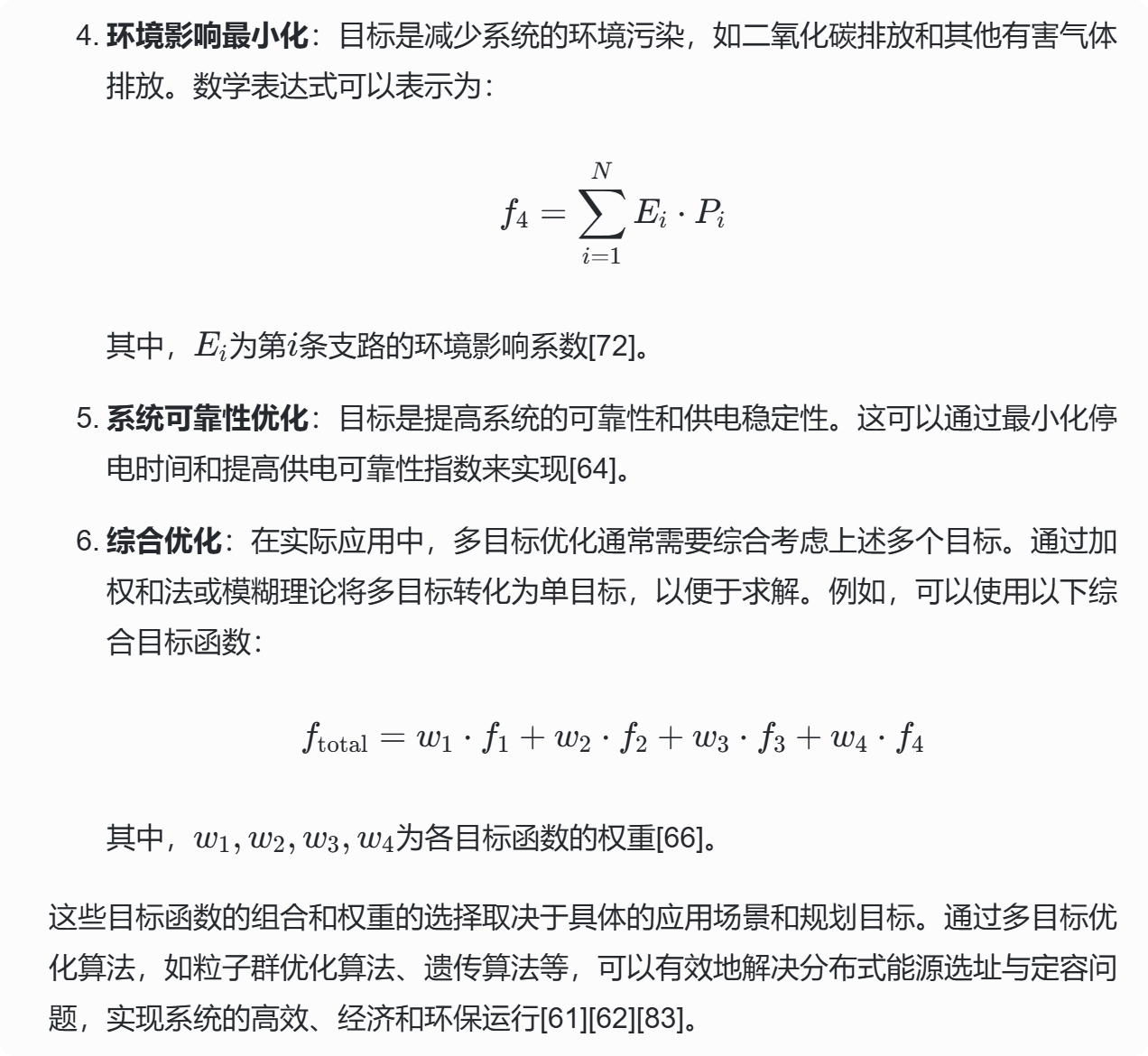
①中问题中多目标优化的具体目标函数
在分布式能源选址与定容问题中,多目标优化的具体目标函数通常包括以下几个方面:
📚2 运行结果


部分代码:
%% 雅可比矩阵
J=[jpt jpv; jqt jqv];
X = (inv(J))*M;%偏差
%% 相位偏差
dTh = X(1:nbus-1);
%% 电压偏差
dV = X(nbus:end);
[e1,d1,n1]=eig(JR);%计算矩阵A的特征值和特征向量的函数是eig(A)[V,D,W] = eig(A),[V,D,W] = eig(A)返回满矩阵 W,其列是对应的左特征向量,使得 W’A = DW’。
%diag(A),若A是一个矩阵,则diag函数的作用是产生提取矩阵的对角线;若a是一个向量,则diag函数的作用是产生一个对角线为a的矩阵
%% 目标2 电压稳定性
f2val=max(1./diag((d1)))*max(abs(dQ));%目标2,稳定性
del(2:nbus) = dTh + del(2:nbus);
k = 1;
for i = 2:nbus
if type(i) == 3
V(i) = dV(k) + V(i);
k = k+1;
end
end
%% 目标2和目标3
tval=sum(1./diag((d1)));
po_val=flow_cal(nbus,V,del,BMva);
f1val=sum(po_val);%各支路网损和
f3val=sum(datain(5:8));%DG容量和
fout=[f1val; f2val; f3val];
%% 雅可比矩阵
J=[jpt jpv; jqt jqv];
X = (inv(J))*M;%偏差
%% 相位偏差
dTh = X(1:nbus-1);
%% 电压偏差
dV = X(nbus:end);
[e1,d1,n1]=eig(JR);%计算矩阵A的特征值和特征向量的函数是eig(A)[V,D,W] = eig(A),[V,D,W] = eig(A)返回满矩阵 W,其列是对应的左特征向量,使得 W’A = DW’。
%diag(A),若A是一个矩阵,则diag函数的作用是产生提取矩阵的对角线;若a是一个向量,则diag函数的作用是产生一个对角线为a的矩阵
%% 目标2 电压稳定性
f2val=max(1./diag((d1)))*max(abs(dQ));%目标2,稳定性
del(2:nbus) = dTh + del(2:nbus);
k = 1;
for i = 2:nbus
if type(i) == 3
V(i) = dV(k) + V(i);
k = k+1;
end
end
%% 目标2和目标3
tval=sum(1./diag((d1)));
po_val=flow_cal(nbus,V,del,BMva);
f1val=sum(po_val);%各支路网损和
f3val=sum(datain(5:8));%DG容量和
fout=[f1val; f2val; f3val];
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]周洋,许维胜,王宁,邵炜晖.基于改进粒子群算法的多目标分布式电源选址定容规划[J].计算机科学,2015,42(S2):16-18+31.
[2]冯元元. 基于多目标规划的分布式发电选址定容研究[D].华北电力大学,2015.
[3]杨智君. 基于群智能算法的分布式电源选址与定容[D].太原科技大学,2019.DOI:10.27721/d.cnki.gyzjc.2019.000065.

















 135
135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









