










03
稠密点云之美
稠密的无人机激光雷达点云具有常规点云的一切属性,点云的标准格式为las、las文件包含的信息曾经在《LAS数据结构介绍》一文中做过介绍。但是笔者认为,高密度的无人机激光雷达点云可以派生出更美的点云,一方面点云本身蕴含的特征有待进一步挖掘,另一方面高密度特征使得点云的真三维特性、单体化特征更加突出。
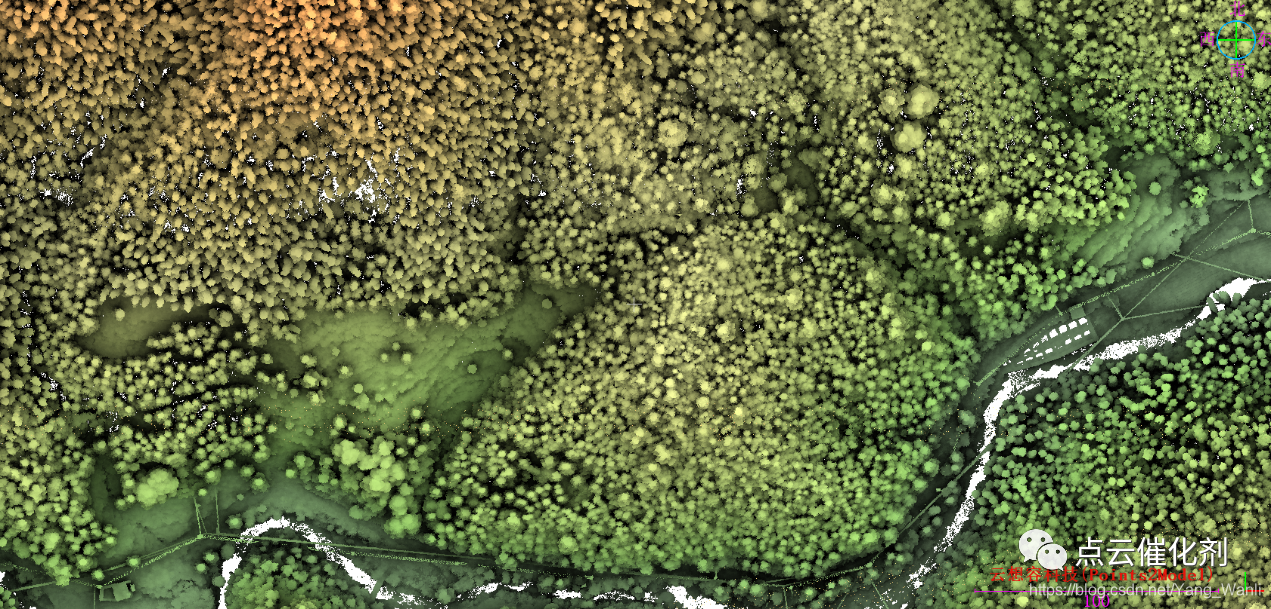
我们知道,目前商用的机载LiDAR系统的激光器绝大多数使用了单一波长的激光光源,所以常见的点云并无颜色或者RGB属性。当然,我们可以将激光雷达点云和影像进行配准、融合以赋予点云RGB信息,或者研发多光谱、高光谱的激光雷达系统使点云本身具有光谱信息,这是后话。但是,更直接的方式是采用颜色映射技术、将点云具有的某一属性的特征值(比如高程、确切的说是Z值)映射为一个颜色,从而产生了五颜六色的点云,如图8(a)、图9所示。当然,颜色映射方案或者说颜色查找表不同,也会对应的不同可视化效果,如图10所示,也就是说,即使对于同一点云,采用不同的配色方案、不同的增强算法都会产生不同的可视化效果,这也增加了点云理解的难度和专业性。
但是,如何让你的点云更加光色夺目呢?我们认为,除了常规的方案、至少还有下述3大类途径可以帮助你实现点云可视化美观效果的数量级提升,并且第1类方法可以叠加到第2、3类方法上,实现强强联合。
3.1、基于鹰眼穹顶布光的增强
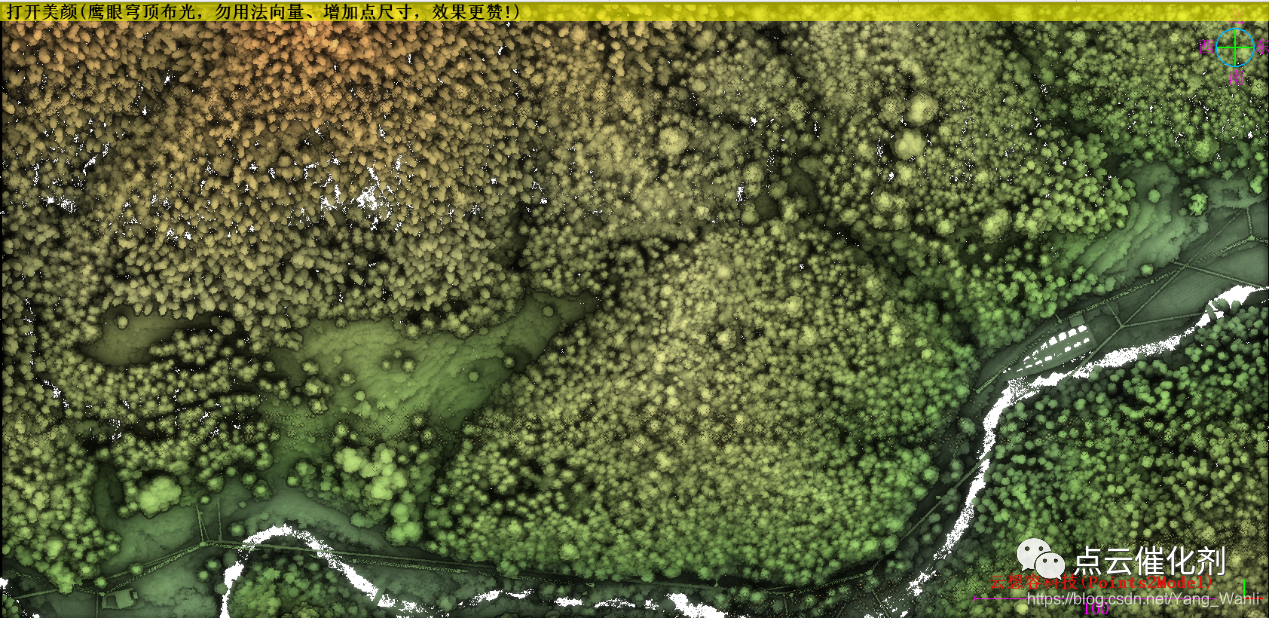
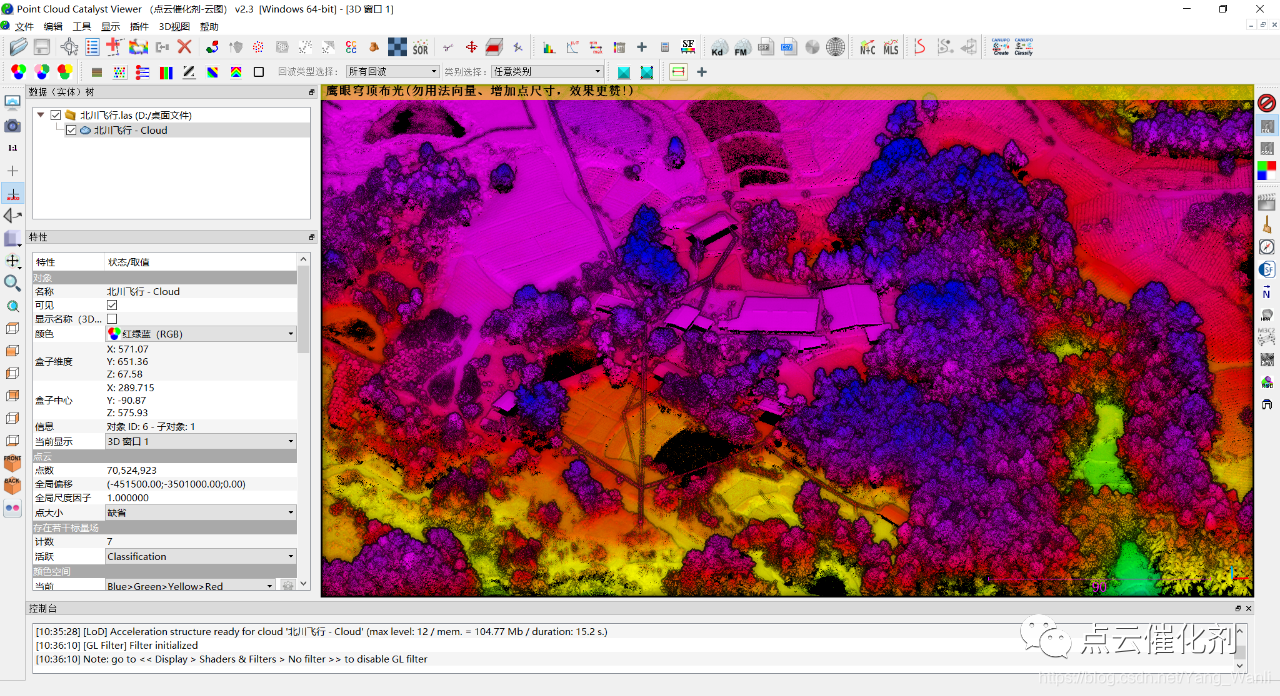
鹰眼穹顶布光(Eye Dome Lighting,EDL)是一个专门为点云着色(上色)设计的一款可视化增强算法。该算法是一个法国人提出来的,法国人不仅爱浪漫,而且是数学天才的故乡,有名的傅里叶变换、小波变换都是法国人搞出来的。可见,追求美也是需要有数学基础的,哈哈。EDL采用了一种图像着色的技术凸显点云可视化时的深度信息,以实现增强点云可视化的美观效果。更通俗的讲,我们浏览点云时,其实是将三维的点云实时的转换为一帧一帧的二维图像,对每一帧二维图像进行类似边缘增强的处理,就可以实现对点云可视化效果的增强。所以,EDL更类似为点云可视化设计的一个滤镜,打开滤镜就可以起到美颜的作用。因此,我们将EDL功能形象的称为“点云美颜”,如图8(b、e、g)所示。
很可惜,由于TerraSolid软件是基于MicroStation平台二次开发的,它的可视化并不支持新型的EDL效果。可喜的是,国产几款软件支持EDL功能;另外大疆智图软件中也集成了此算法用于点云的可视化,如图9所示。
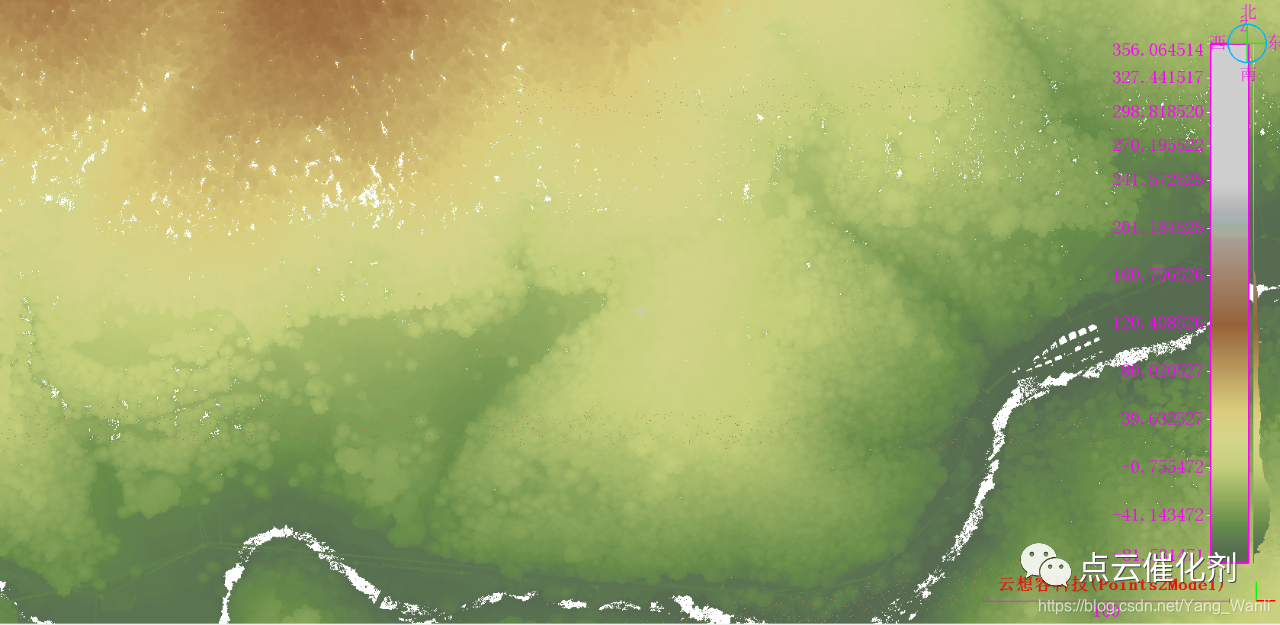
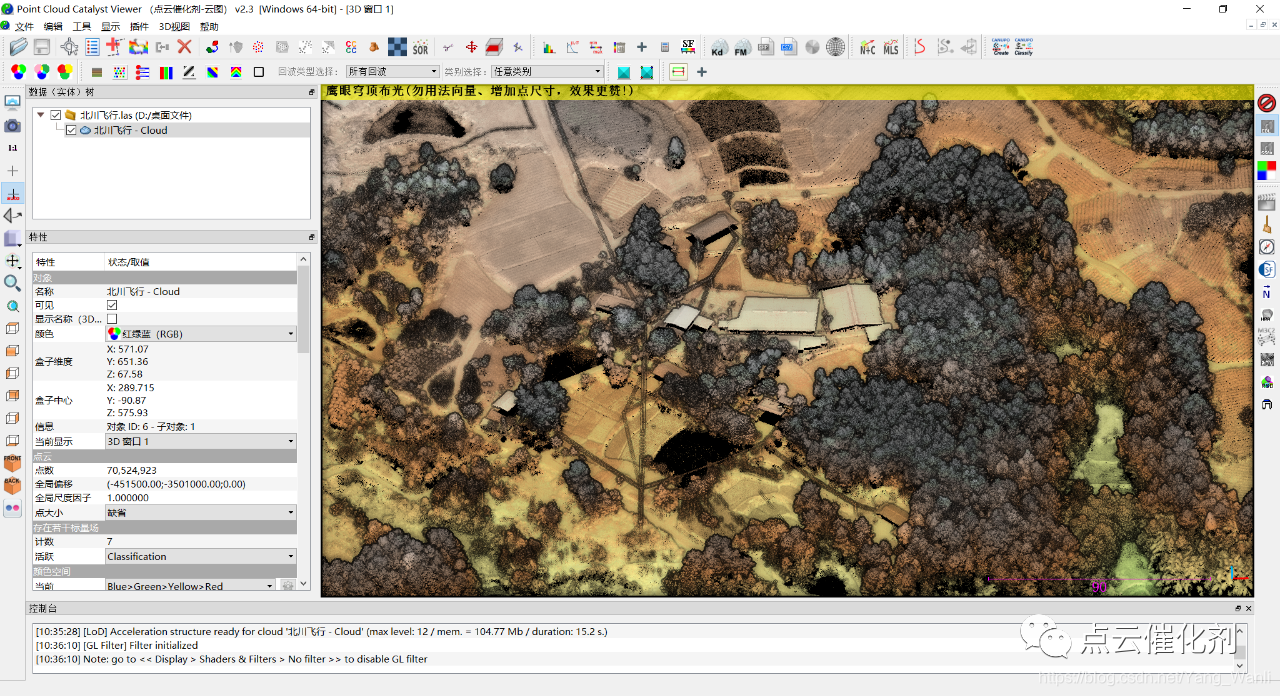
(a)按高程着色的点云可视化效果

(b)鹰眼穹顶布光增强后的按高程着色的点云可视化效果
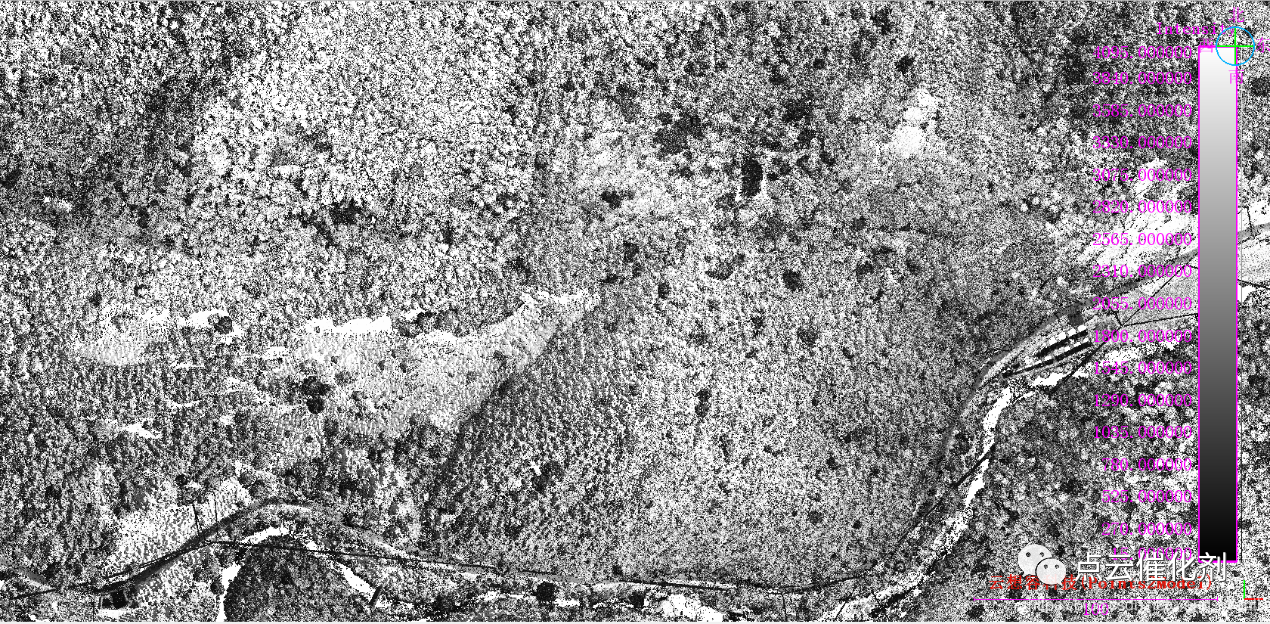
(c)按反射强度着色的点云可视化效果
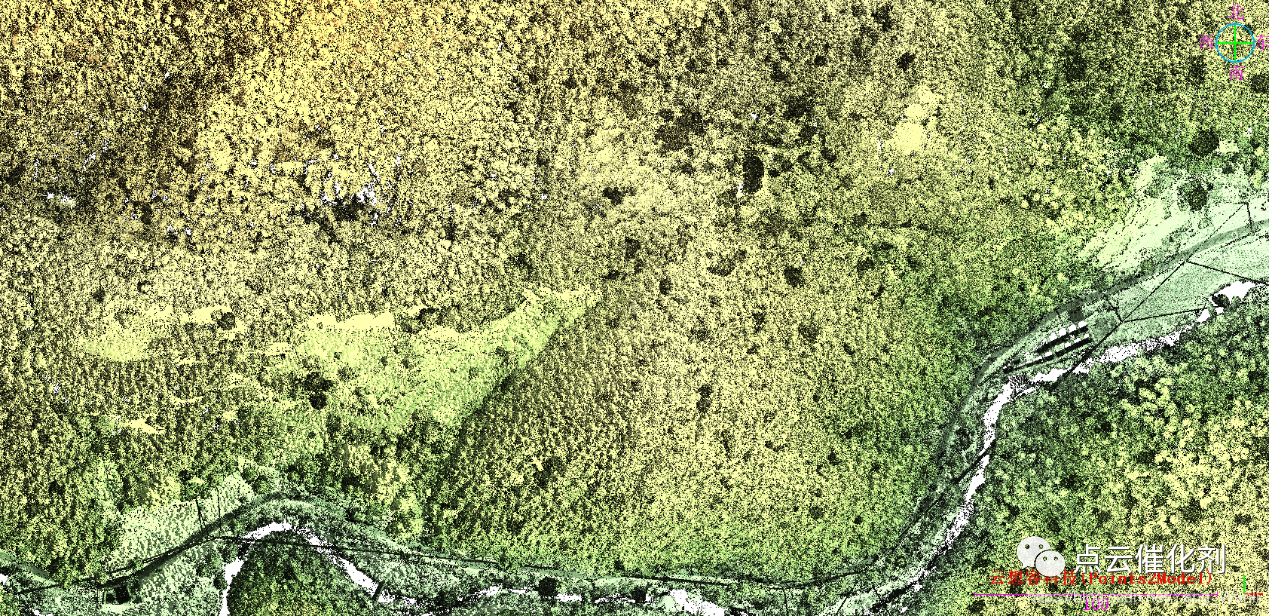
(d)融合高程和反射强度着色的点云可视化效果
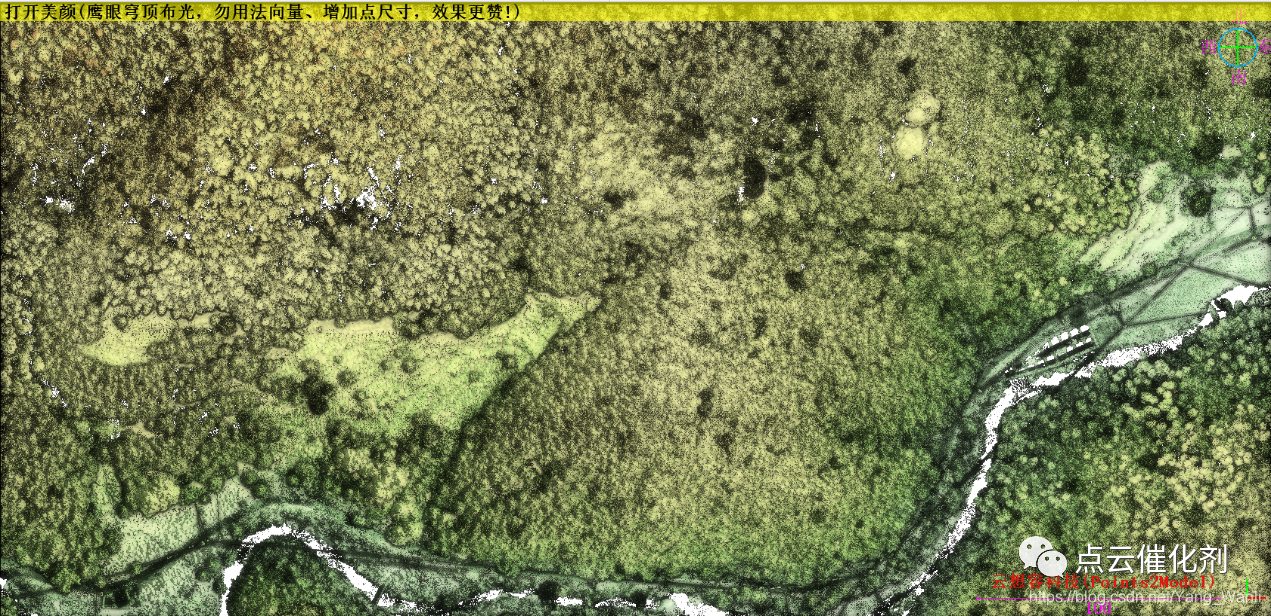
(e)鹰眼穹顶布光增强后的融合高程和反射强度着色的点云可视化效果
(f)融合高程和立体特征着色的点云可视化效果
(g)鹰眼穹顶布光增强后的融合高程和立体特征着色的点云可视化效果
图8凸显点云之美的可视化效果
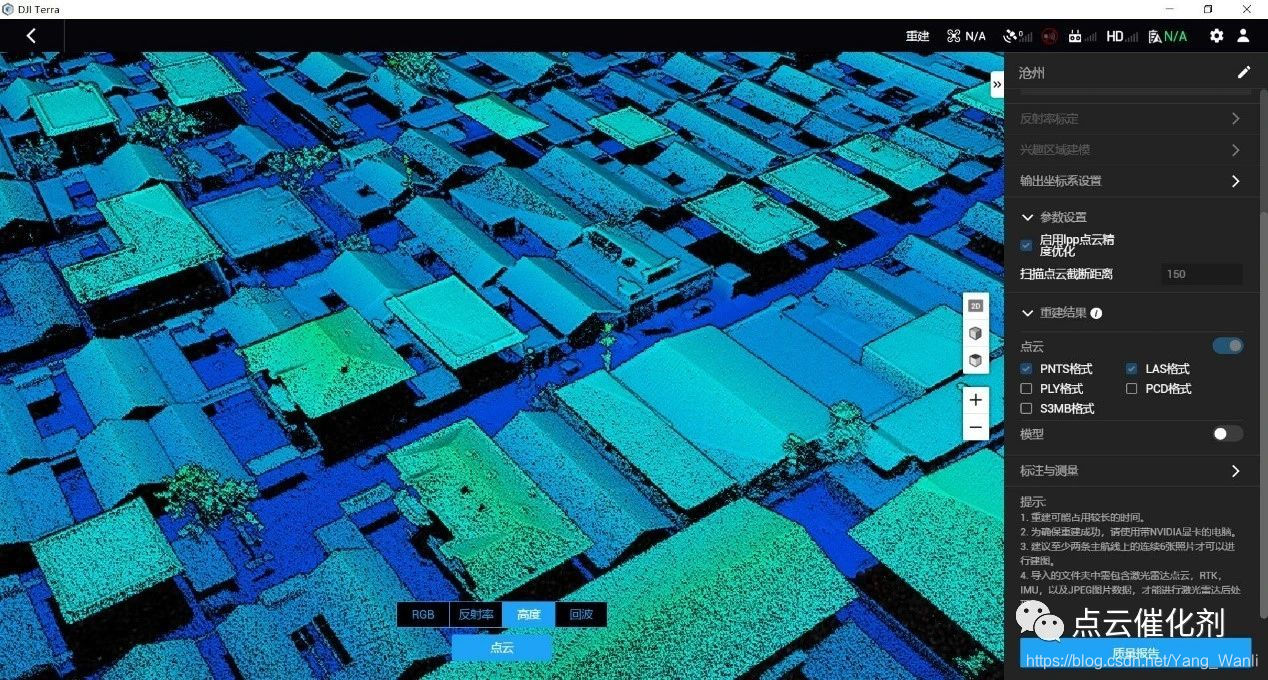
图9集成EDL算法的大疆智图软件中点云的可视化效果
3.2、基于特征融合的增强
特征融合可以进一步增强点云的可视化效果、凸显点云之美。目前多数的激光雷达系统本身能获取反应地物光谱特性的反射强度特征,如图8(d、e),受业界普遍欢迎的可视化软件QTReader中就使用了此功能增强点云的可视化效果。
另外,点云的真三维特性也可以用于增强点云的美观效果,点云的真三维特性是基于点云的三维坐标提取的一种新特征,需要耗费较大的计算资源,只有极少数的部分国产的软件支持此功能,如图8(f、g)、图11(c)所示。
(a)使用配色方案1渲染的点云效果图
(b)使用配色方案2渲染的点云效果图
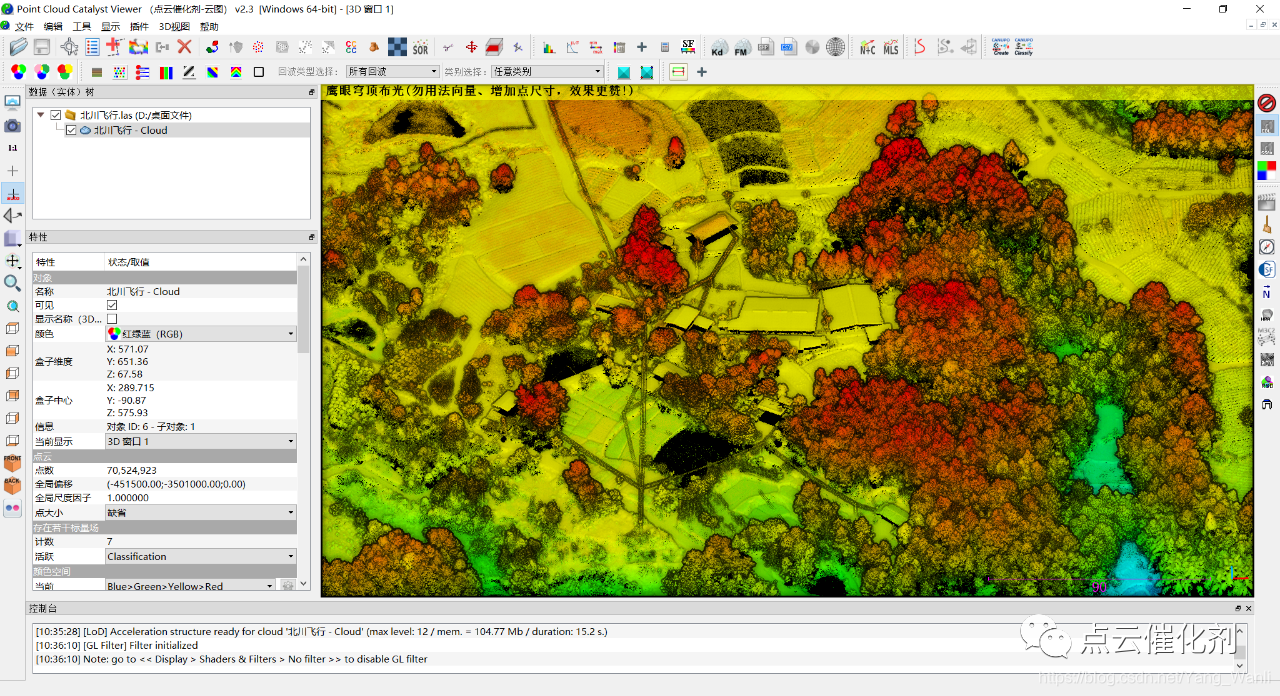
(c)使用配色方案3渲染的点云效果图
图10 使用不同配色方案的点云可视化效果
3.3、基于单体化(对象化)的增强
高密度的LiDAR点云进行分割可以产生多种类型的实体,对每一个实体赋予一个颜色也可以增强点云的可视化效果,增加点云之美,如图11所示。
点云分割、又称为点云聚类,是将整个点云数据集根据一定的规则划分为一个一个子集的过程,获取的一个子集称为一个对象、或者一个实体。好的分割方法产生的一个实体与地理世界中的一个实体是一一对应的,所以说点云分割建立了点云与真实地理世界的一个桥梁,在单体化实景中国建设中必有广泛的用武之地。需要指出的是,点云分割具有很强的任务导向性或者说行业应用导向性。或者说,没有通用的点云分割方法;对于同一点云,不同的行业应用或者要生成不同的产品需要不同的分割方法。我们的公众号文章《基于实体的点云智能处理催化从点云数据到信息的行业应用进程》中曾经介绍过部分面向工程应用的点云分割方法,感兴趣的朋友可以点击链接看一看。总之,基于稠密的无人机LiDAR点云、服务行业应用的点云分割方法产生的实体也可以有效的增强点云的可视化效果。
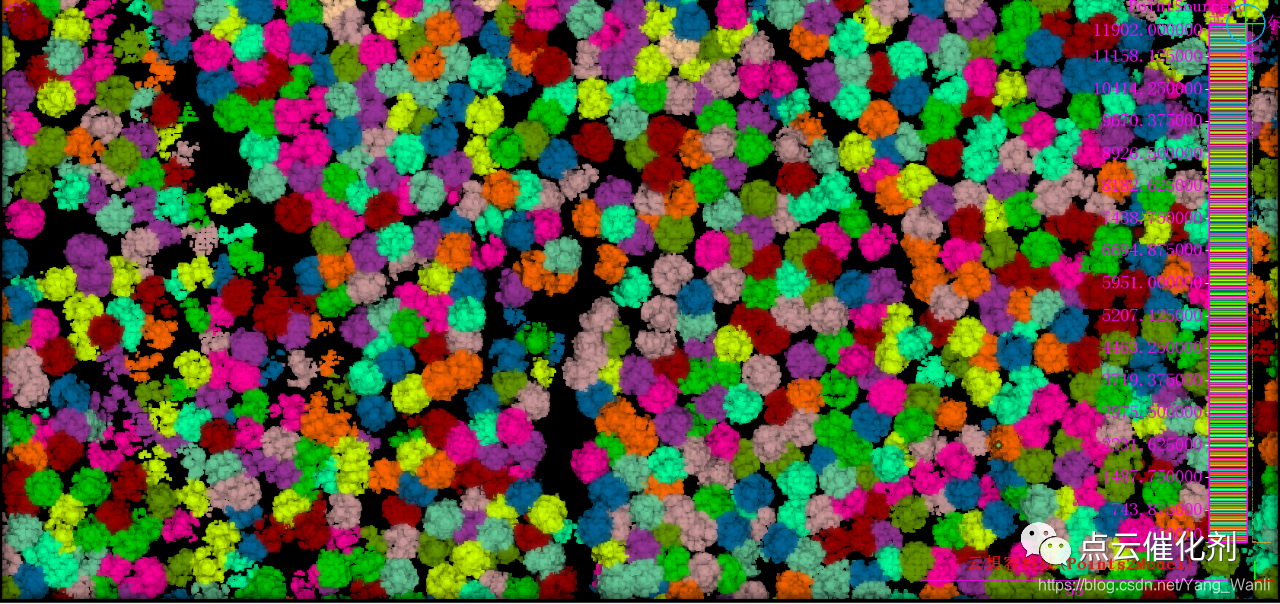
(a)按照单株树木着色显示的点云
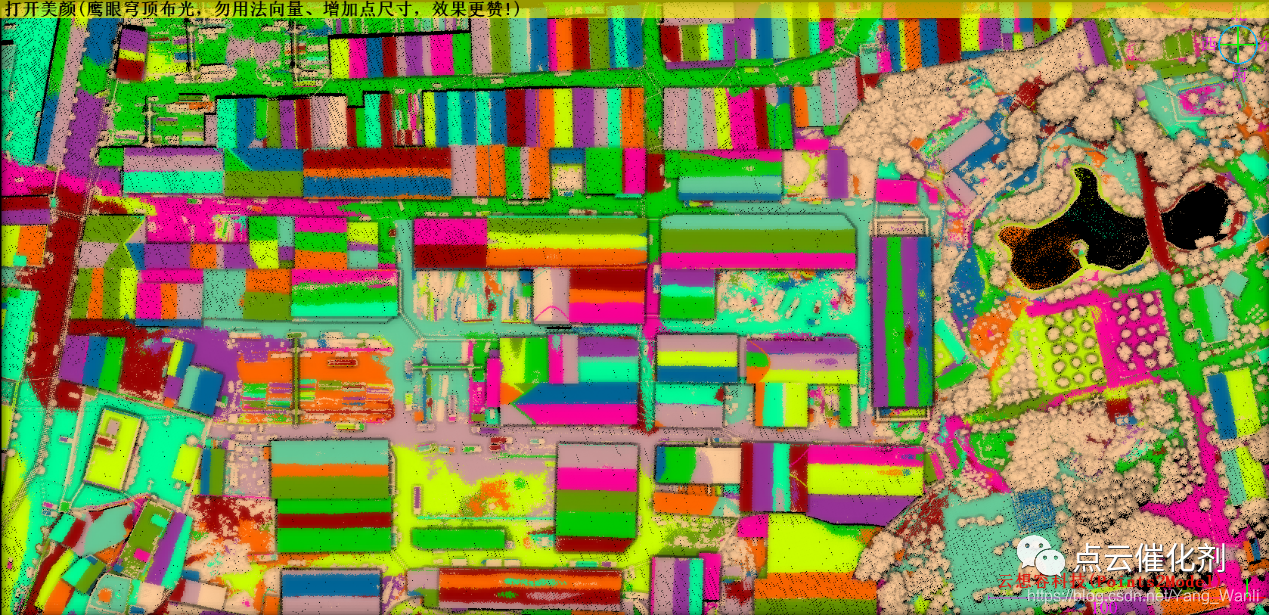
(b)按照单个平面着色显示的点云
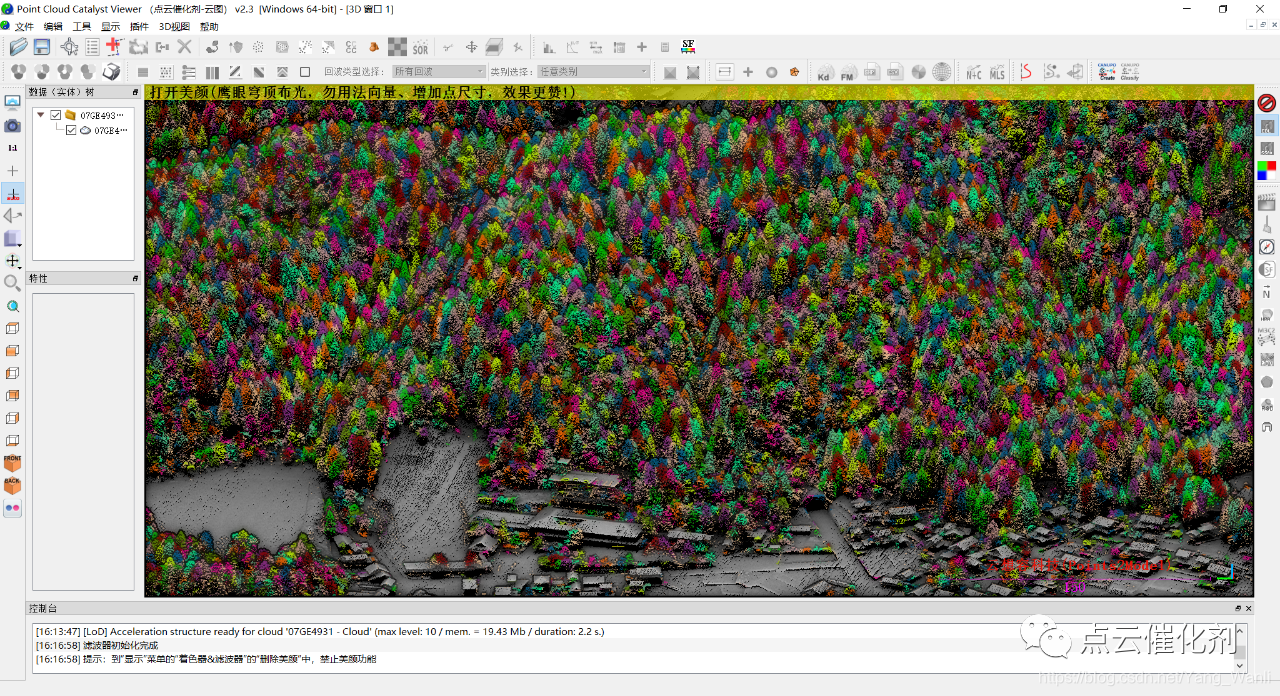
(c)鹰眼穹顶布光增强后的融合单株树木和立体特征着色的点云
图11 基于单体化(对象化)增强的点云可视化效果
参考文献:
[1] 中华人民共和国国家标准. GB/T 36100-2018 机载激光雷达点云数据质量评价指标及计算方法
[2] 中华人民共和国国家标准. GB/T 8024-2011 机载激光雷达数据获取技术规范
[3] Boucheny, C. (2009). “Interactive scientific visualization of large datasets: towards a perceptive-based approach”. PhD, Université Joseph Fourier (in French only).
[4]《LAS数据结构介绍》
[5]《基于实体的点云智能处理催化从点云数据到信息的行业应用进程》














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









