






机械臂两种控制方式:
开环控制、闭环控制
- 开环控制:感知部分得到物体坐标→控制机械臂末端执行器到达这个坐标
- 闭环控制:感知部分同时得到物体坐标与机械臂未端执行器坐标>控制机械臂末
端执行器坐标与物体坐标两坐标重合
- 区别:开环控制中机械臂末端执行器的坐标为机械臂正逆解得到(无反馈),而
闭环中的末端执行器坐标为感知部分得到(有反馈)
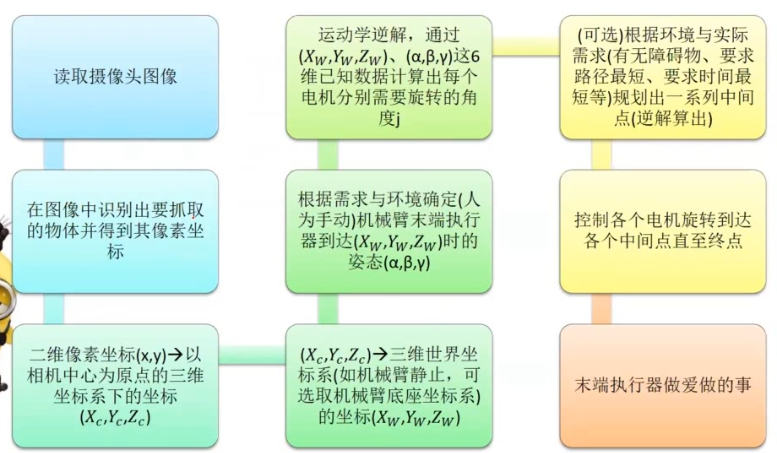
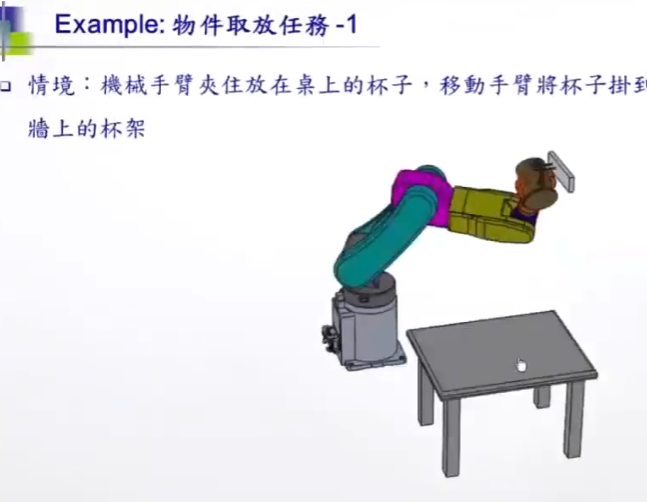
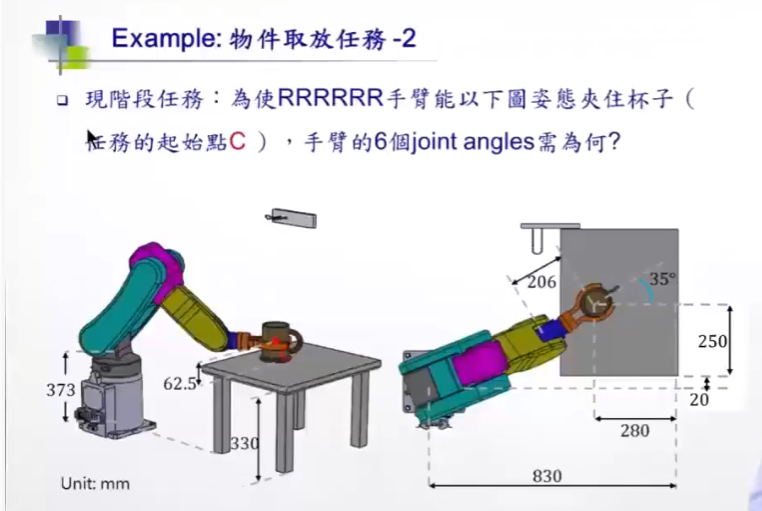
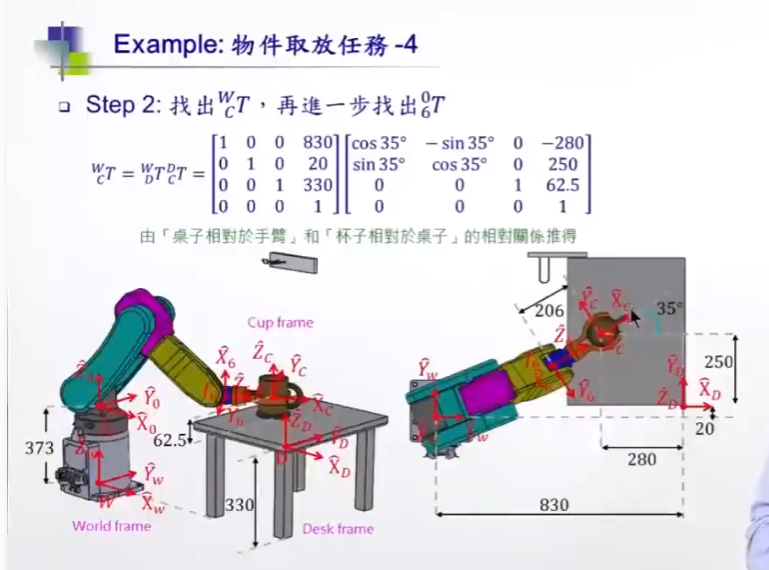
视觉机械臂抓取流程
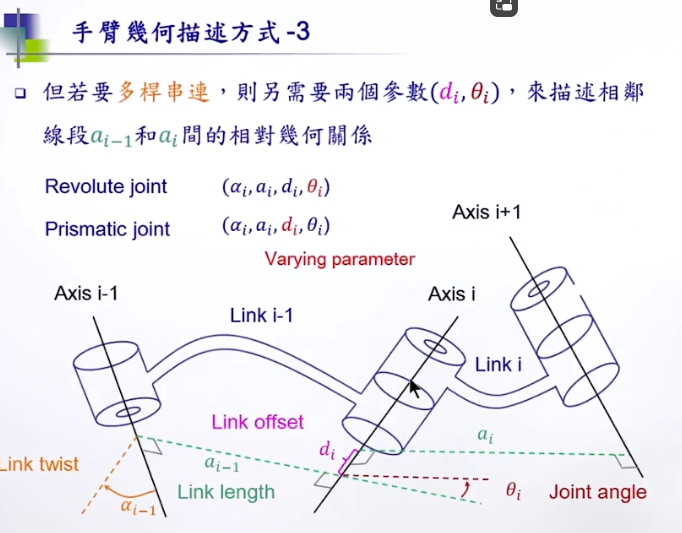
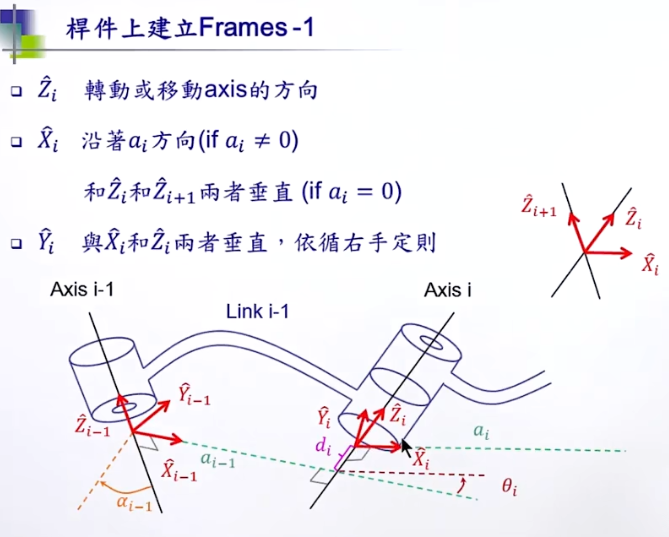
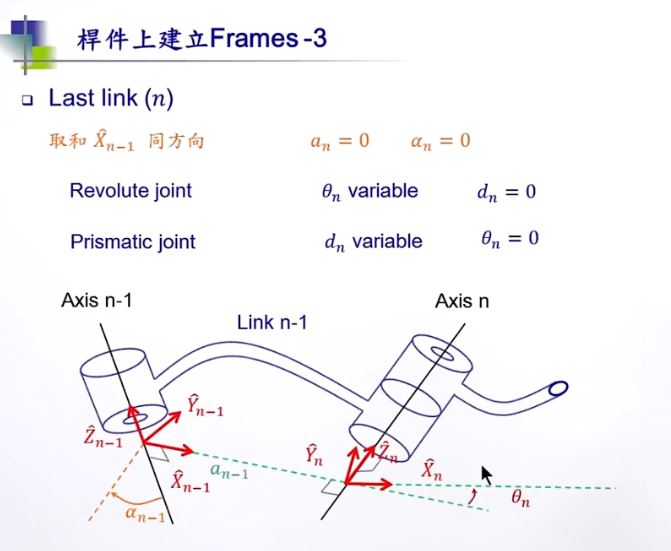
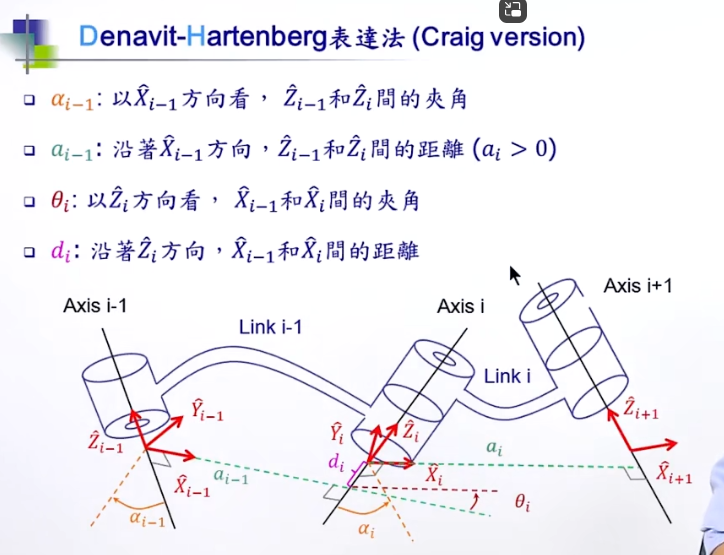
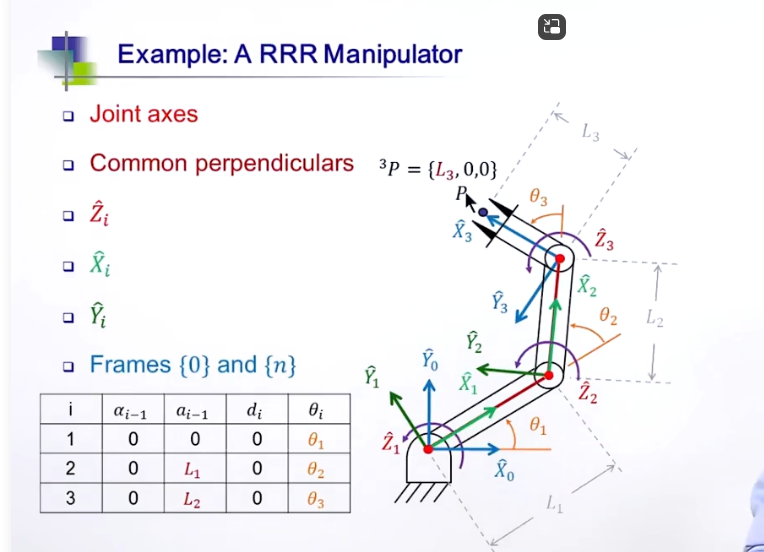
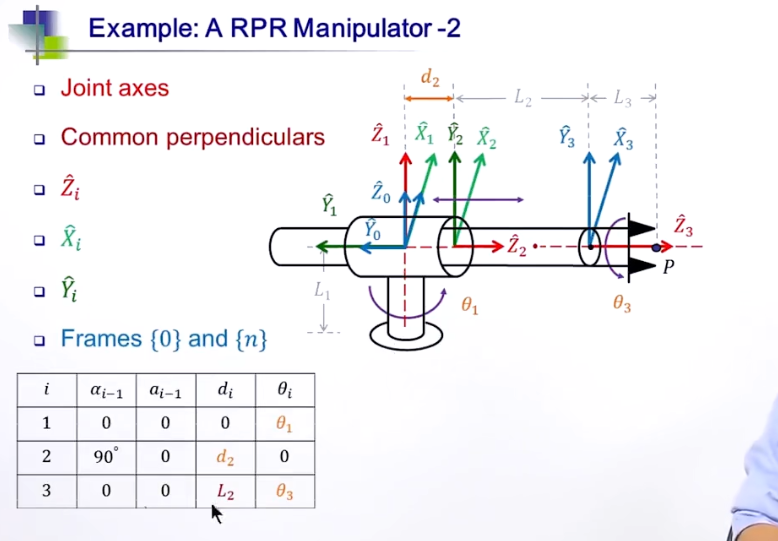
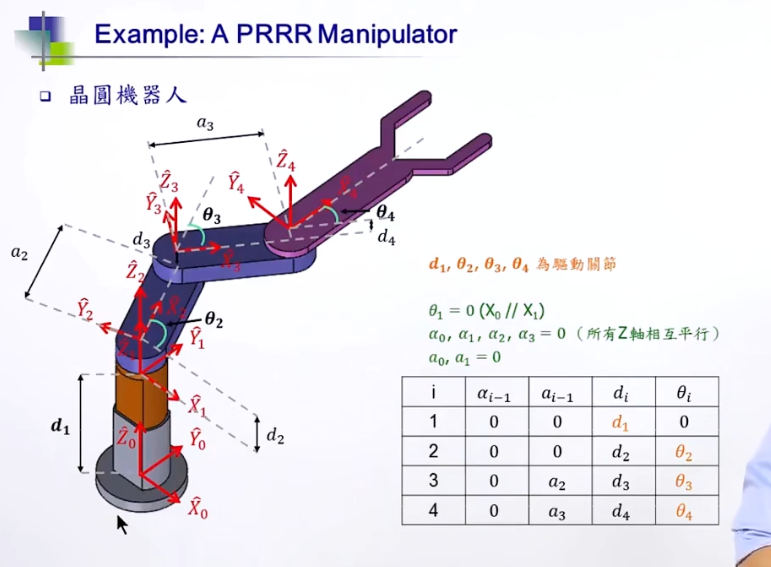
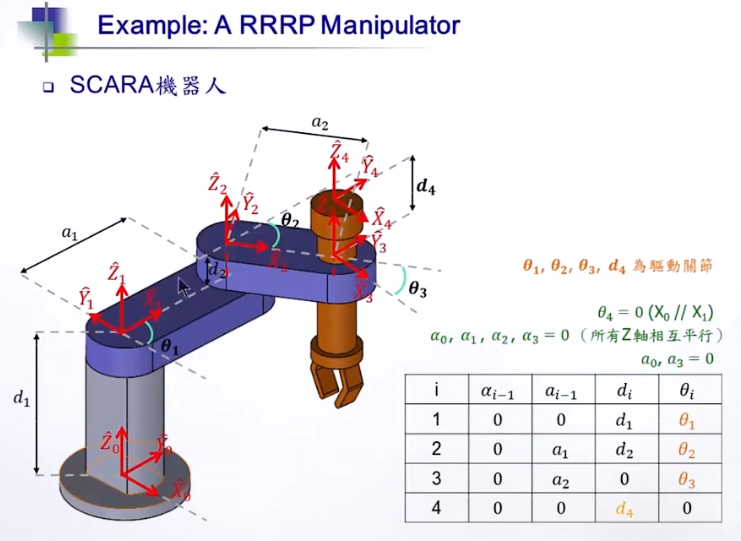
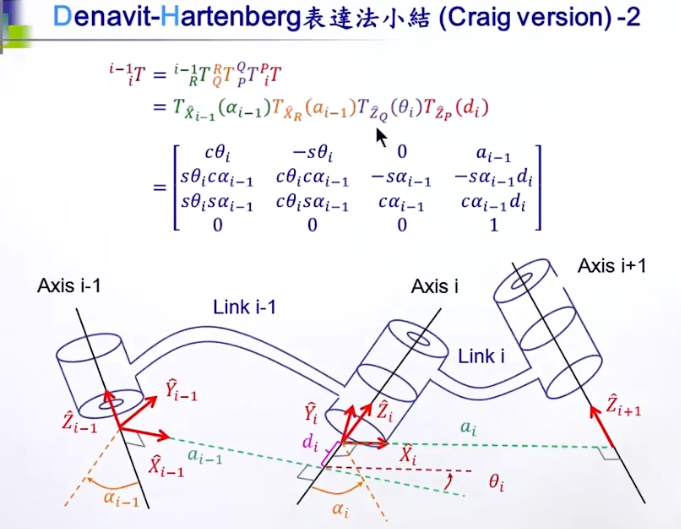
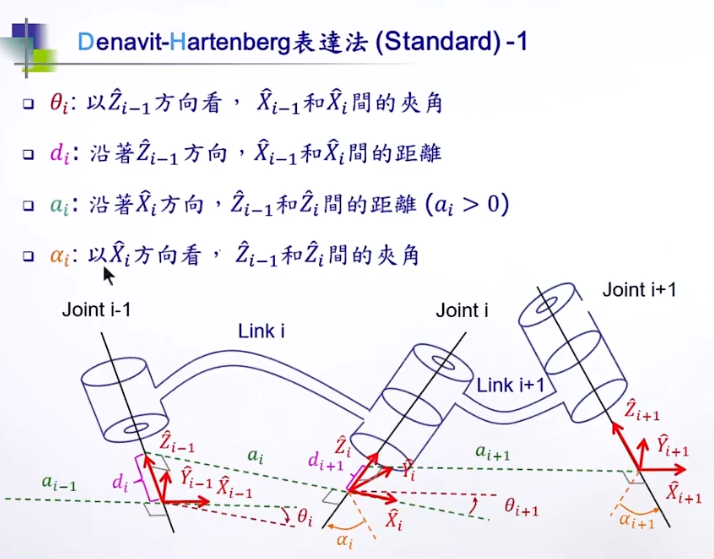
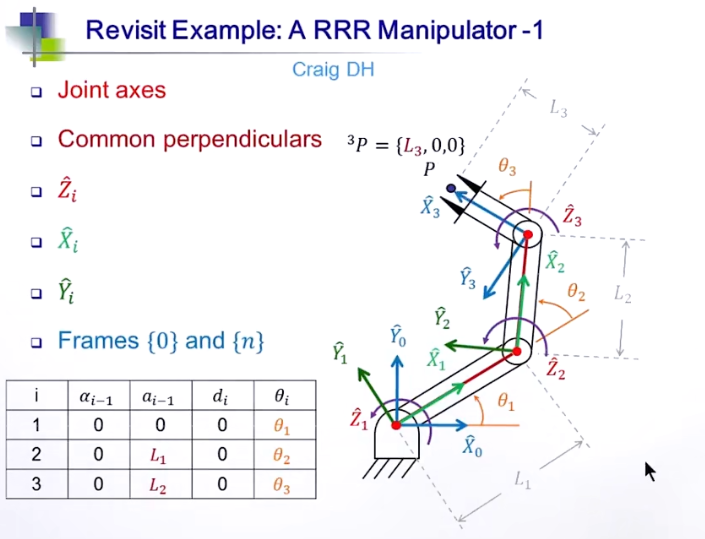
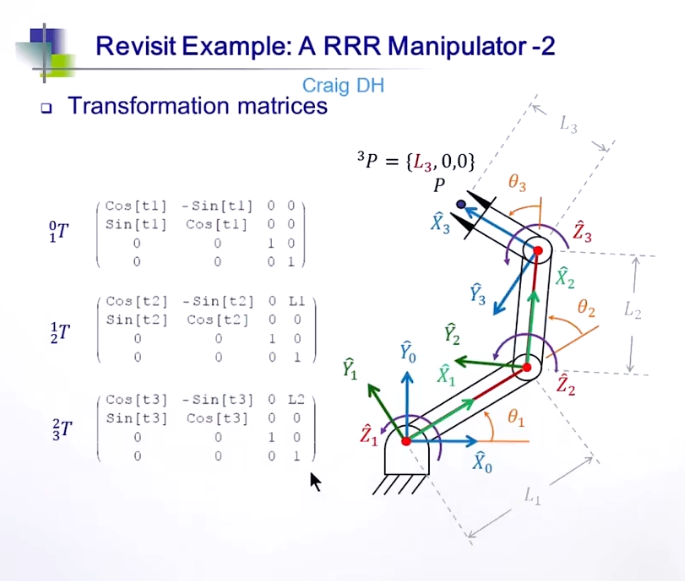
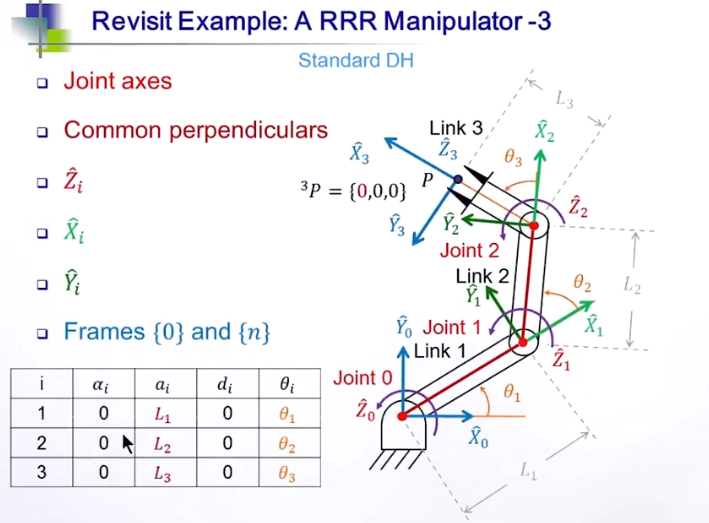
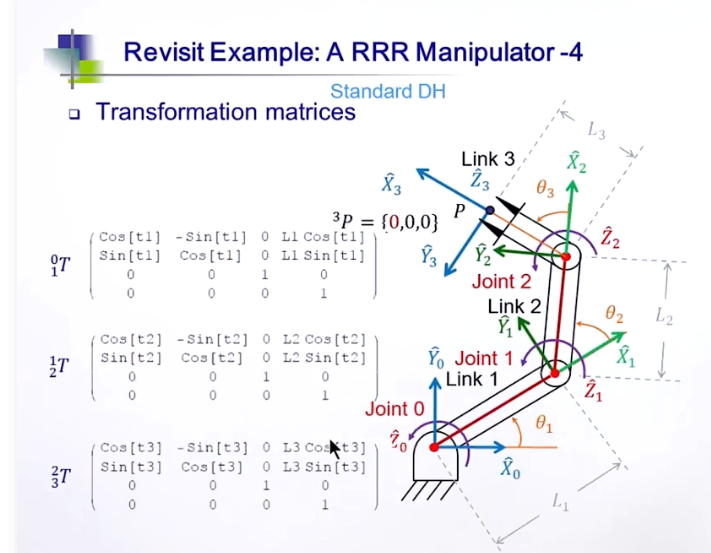
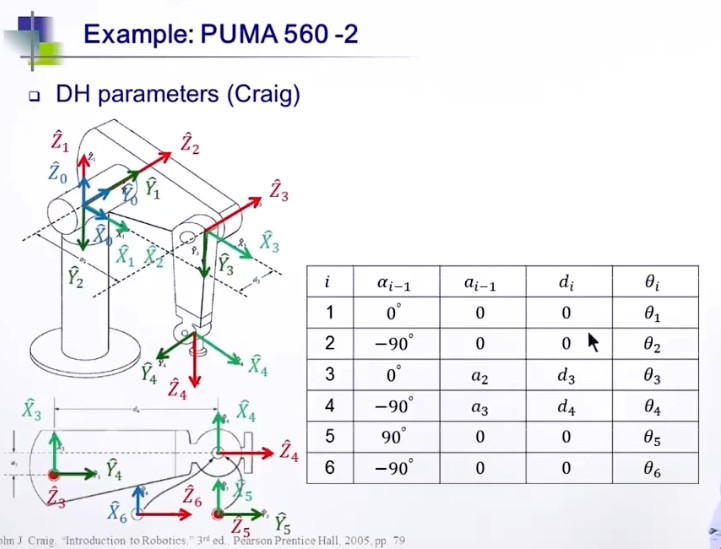
4.机械臂的描述方式-DH表示法
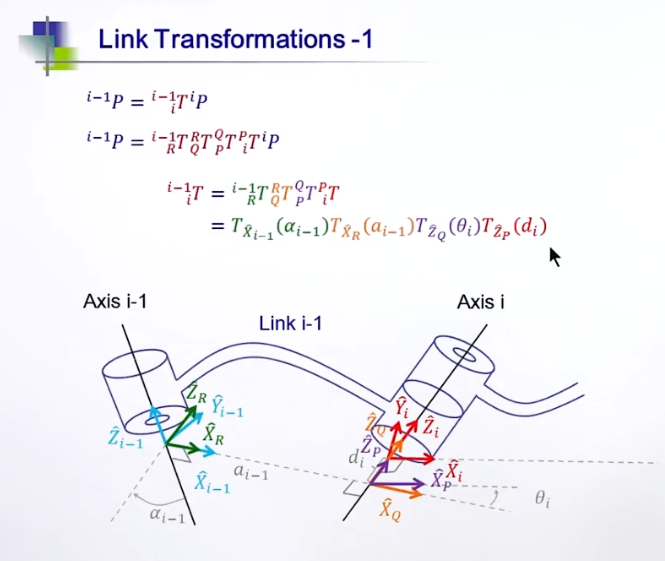
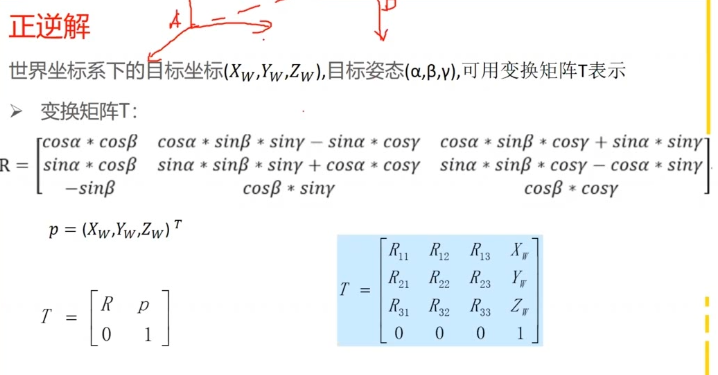
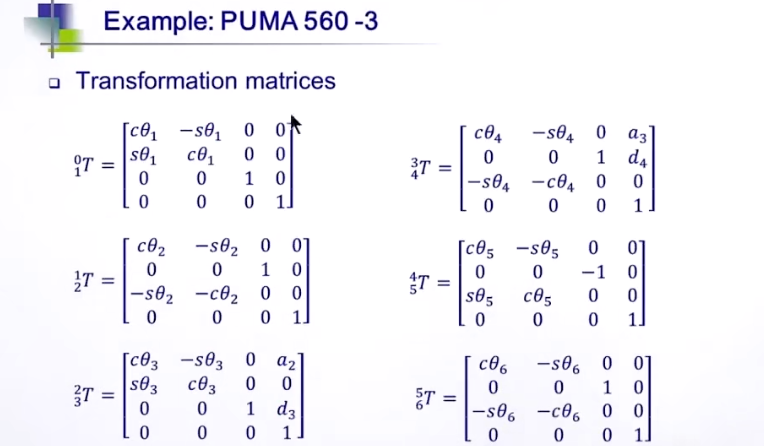
左上角的3x3的矩阵是旋转矩阵,右上角的3X1矩阵是从i-1Frame的角度去看,是角度和长度的复合
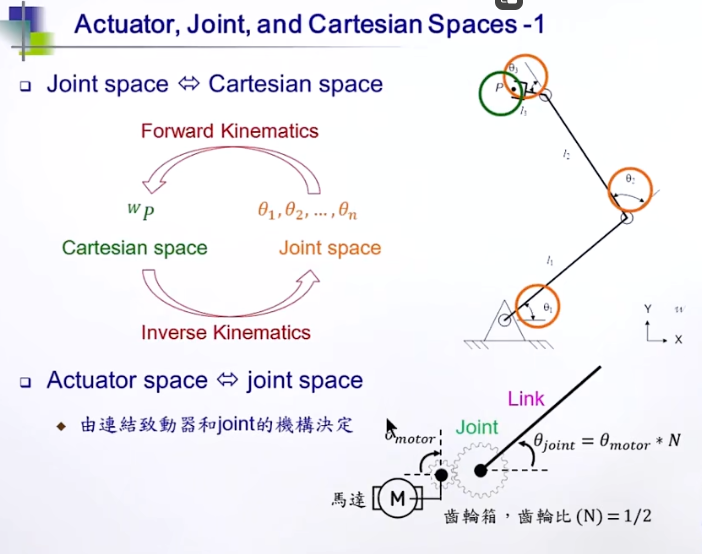
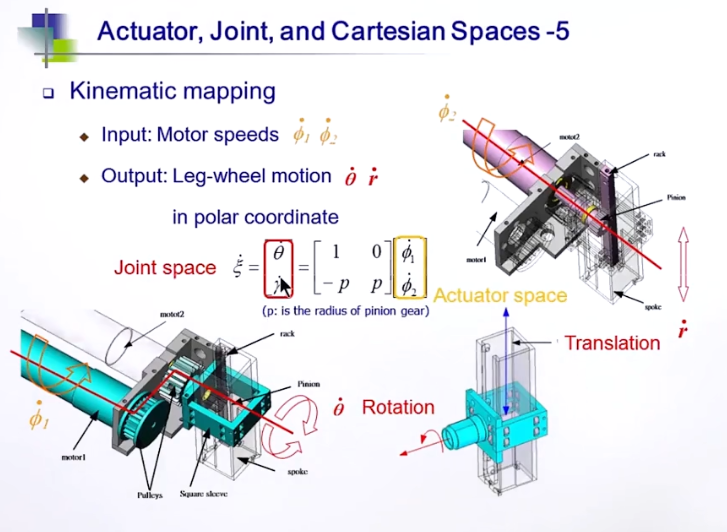
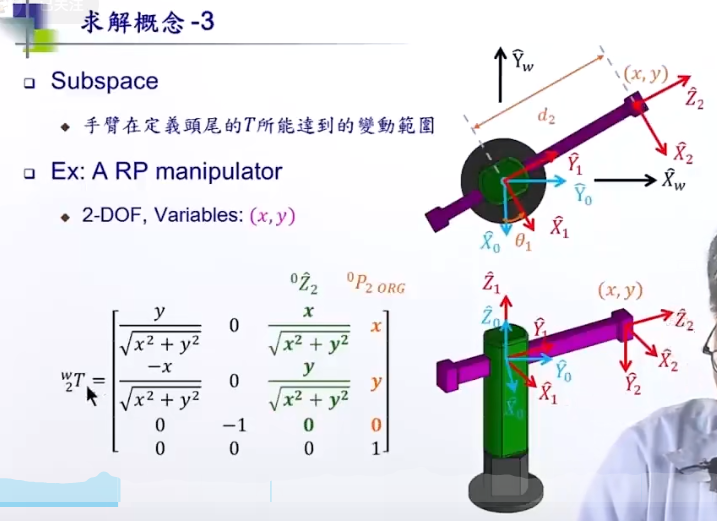
运动空间和关节空间
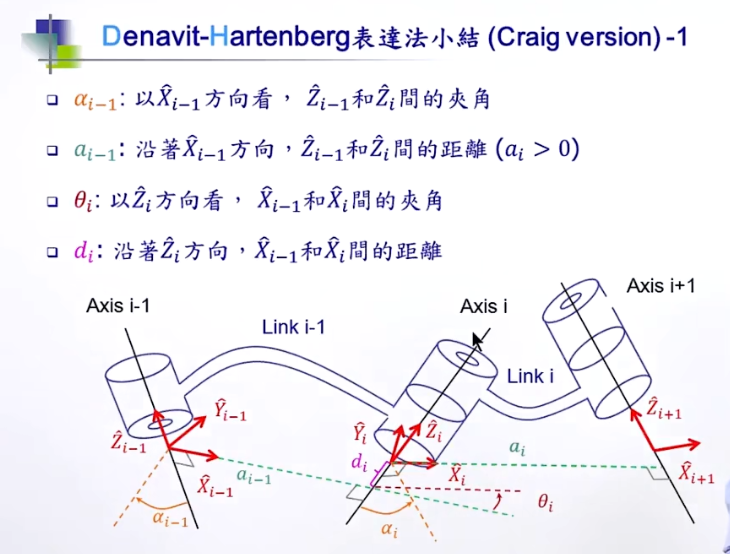
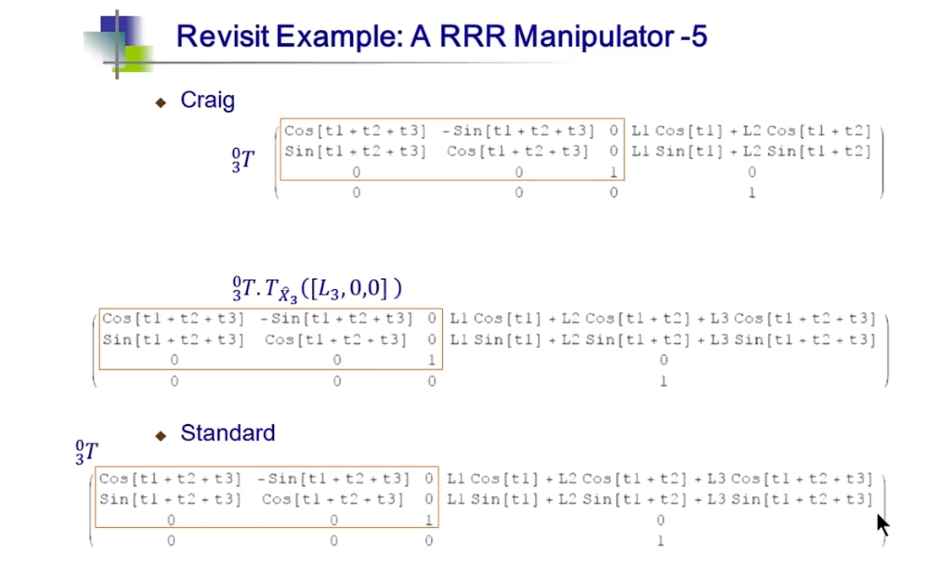
Craig version方法
Standard方法
第二种表达方法,就是i和i-1顺序的问题,不同架构,各有好坏
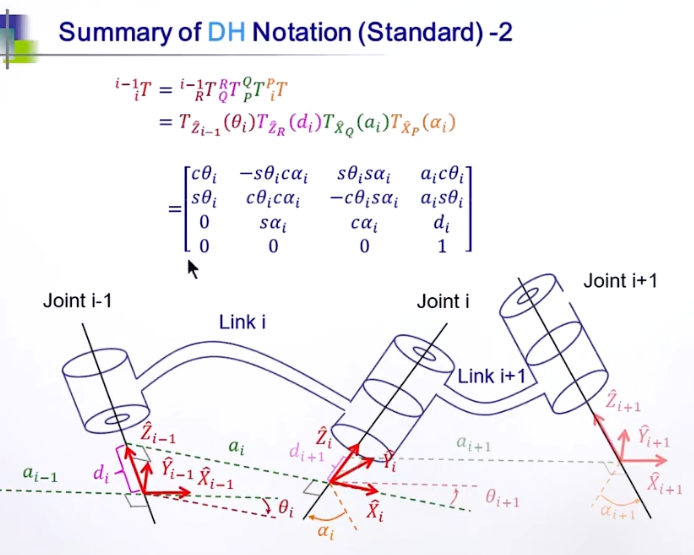
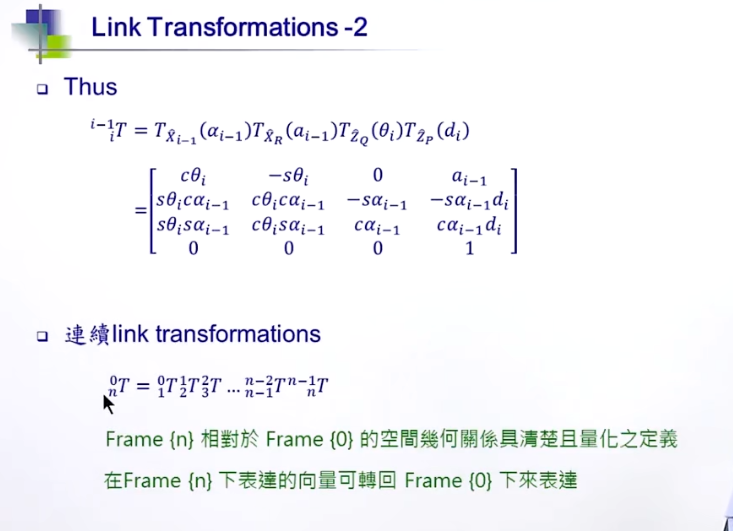
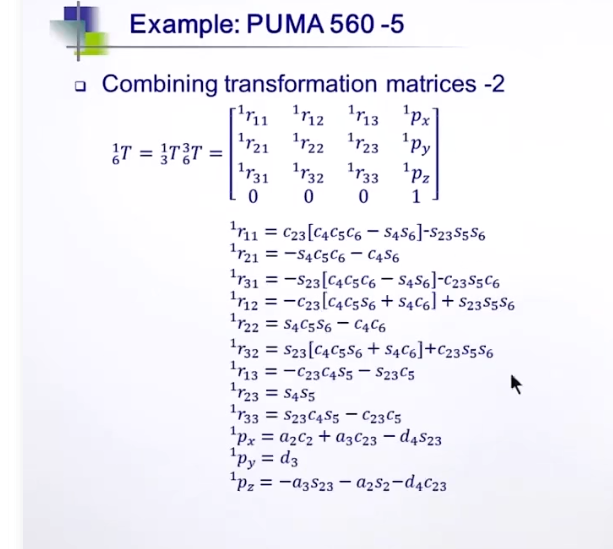
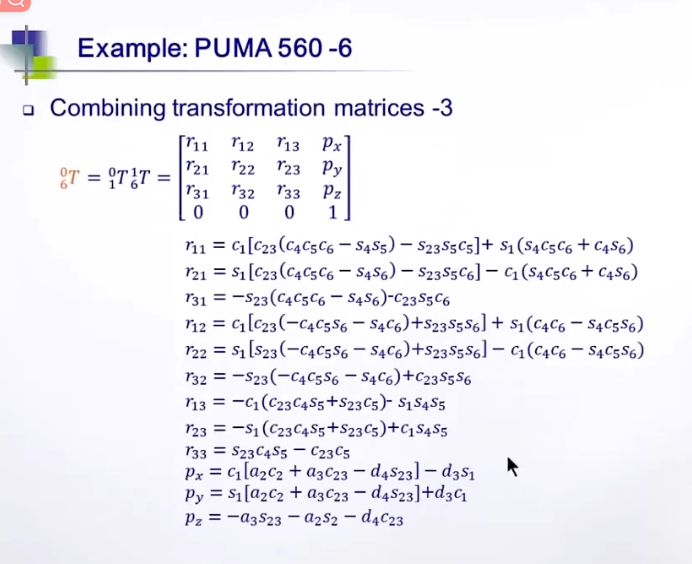
殊途同归,不同的表示方法,但是对于大地参考系而言最后表示一个点的矩阵是相同的
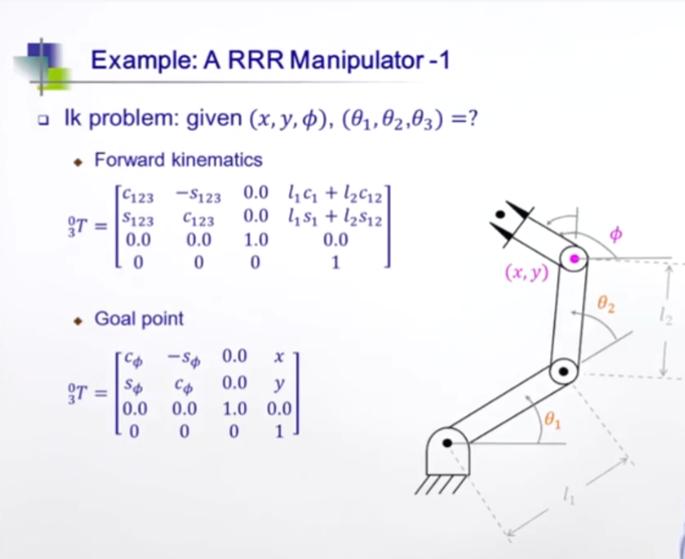
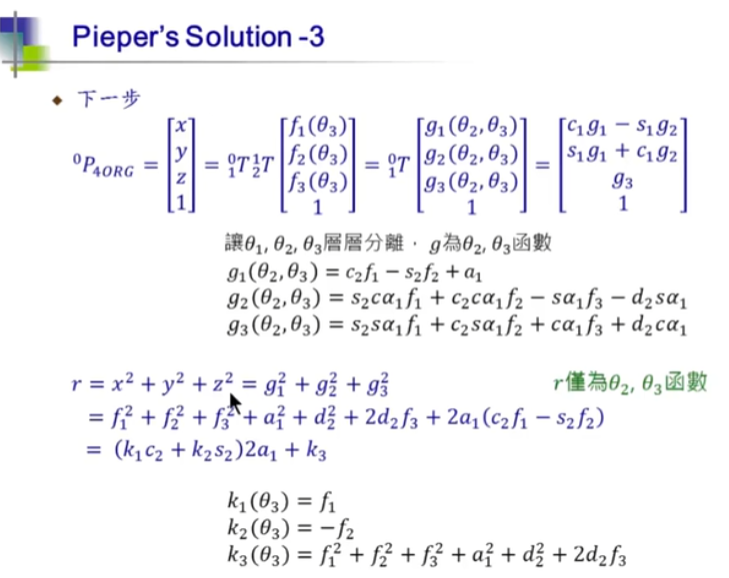
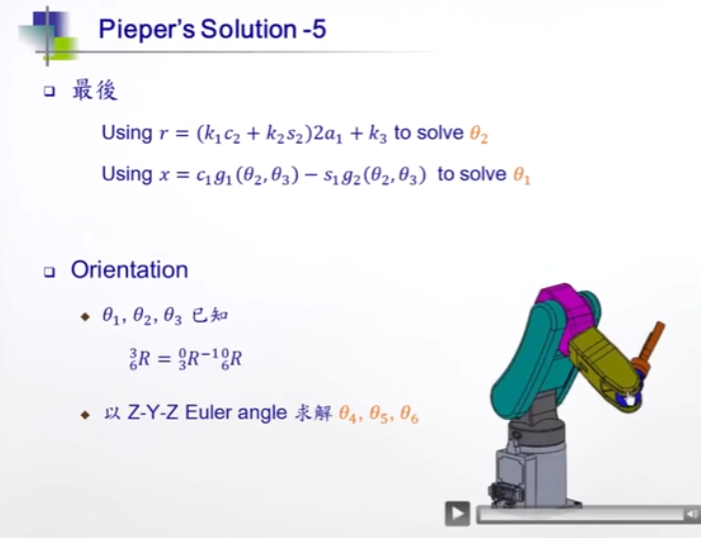
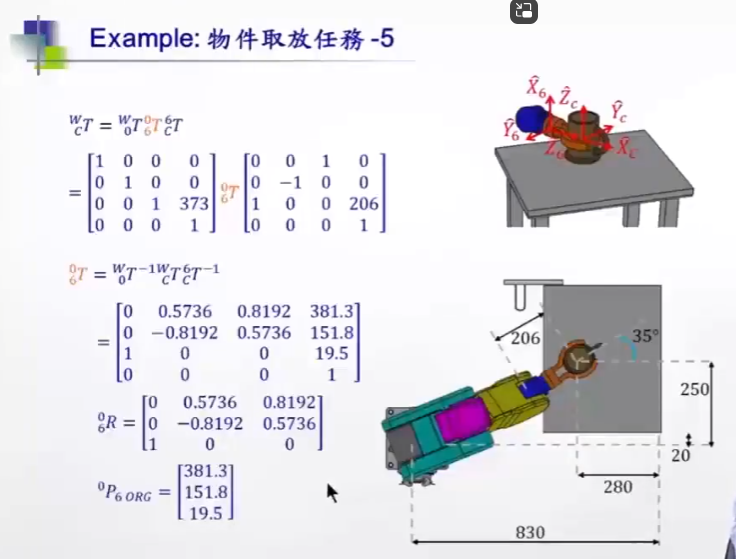
逆运动学
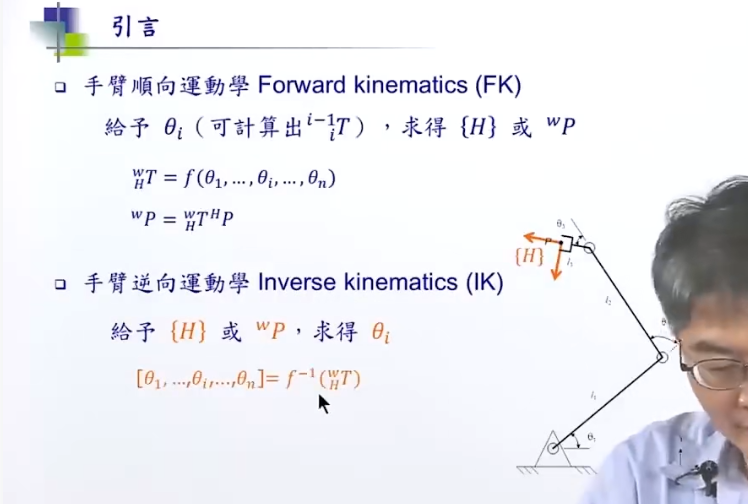
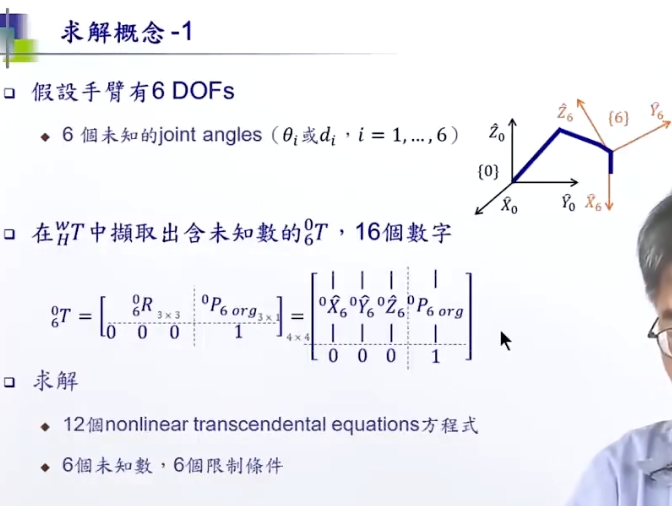
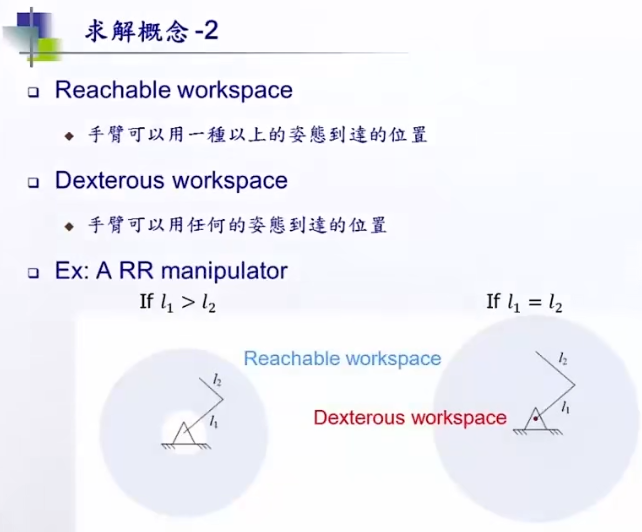
求解概念
- Dexterous workspace
- Reachable workspace
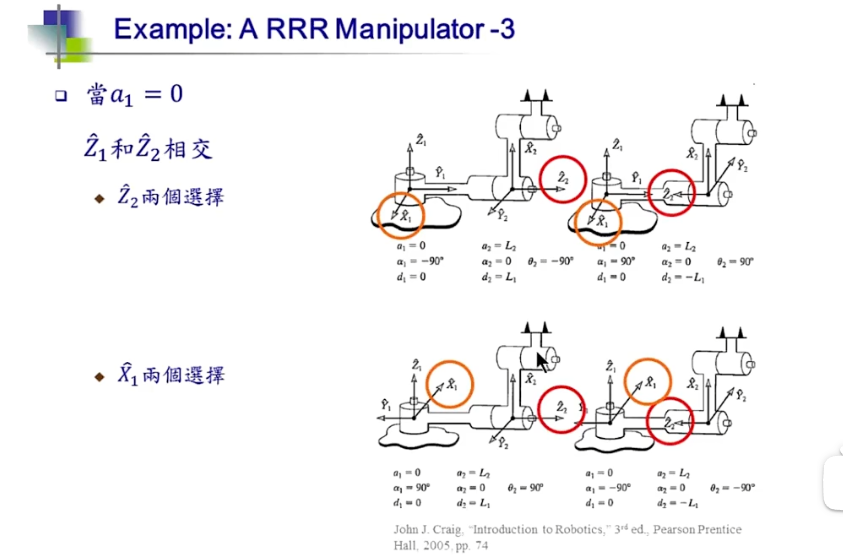
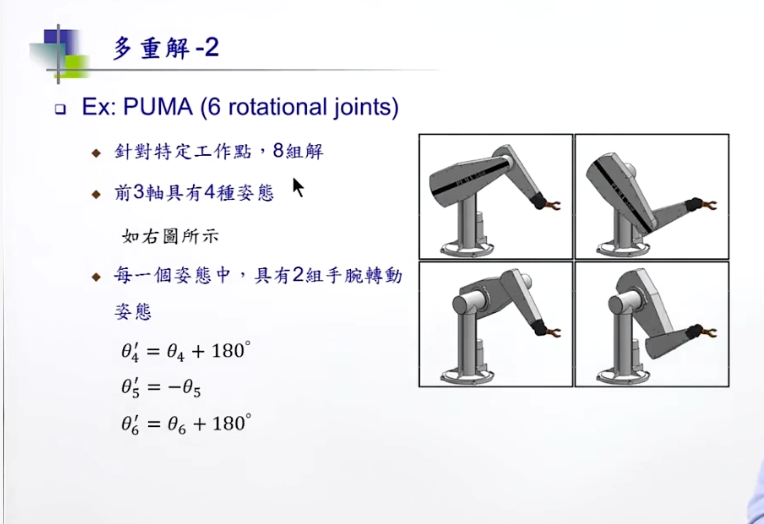
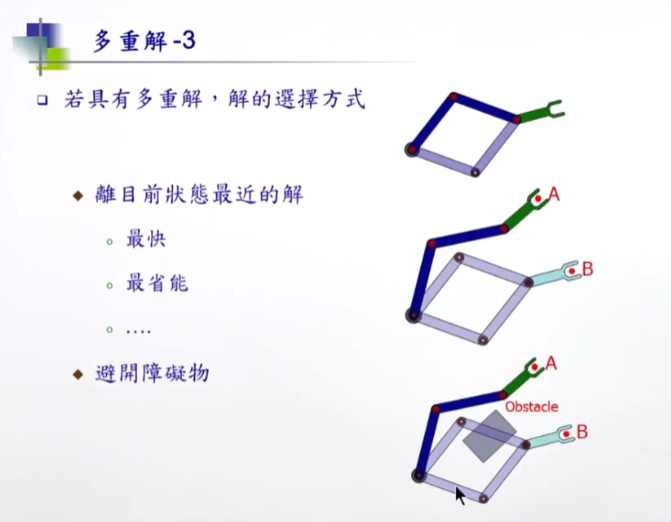
多组解
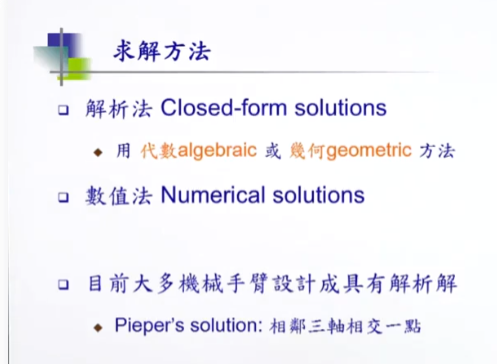
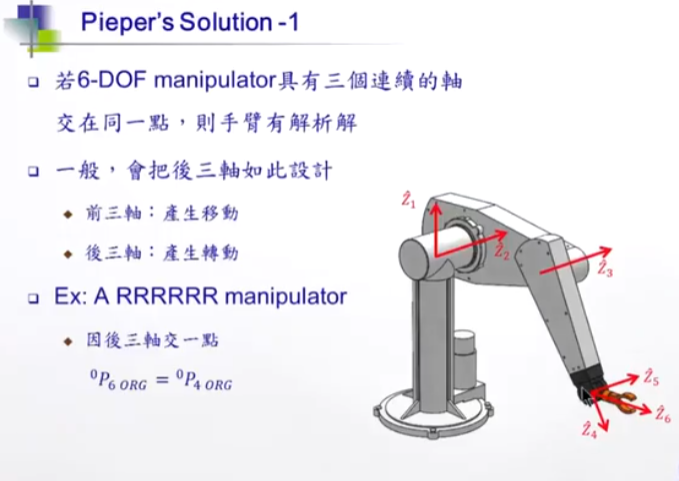
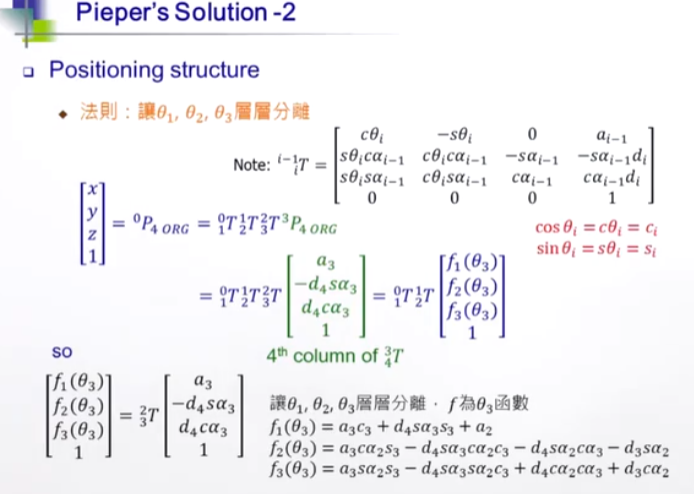
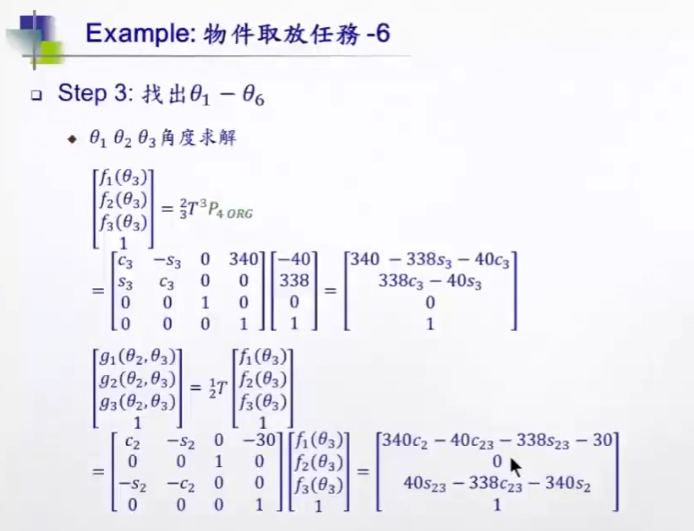
 ### 求解方法
### 求解方法
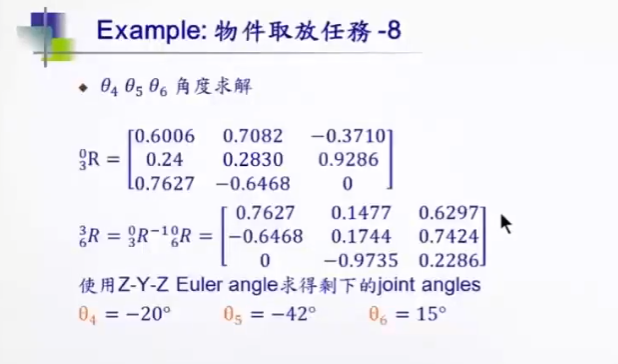
这个是上下矩阵相等,解出来每个关节的角度
几何解
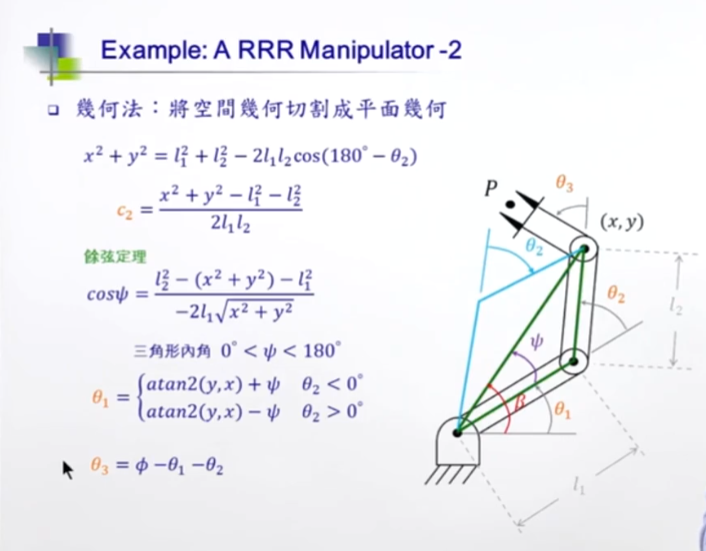
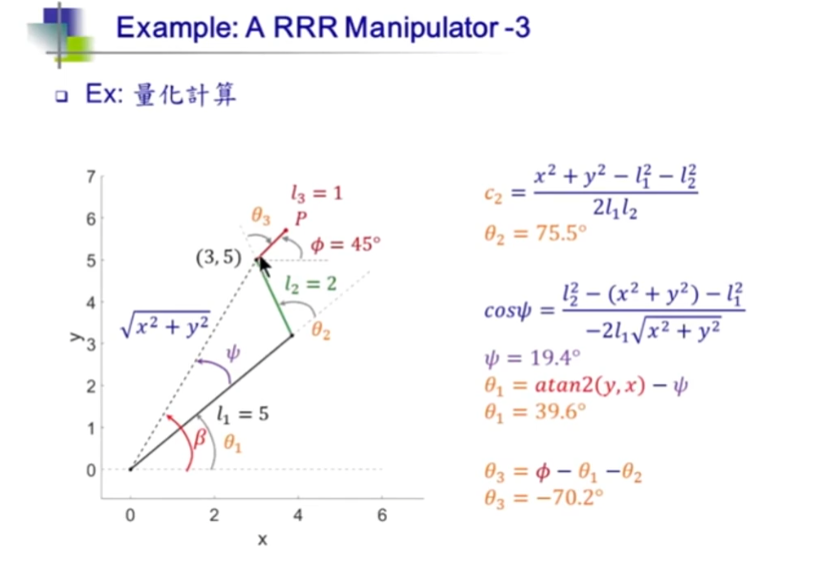
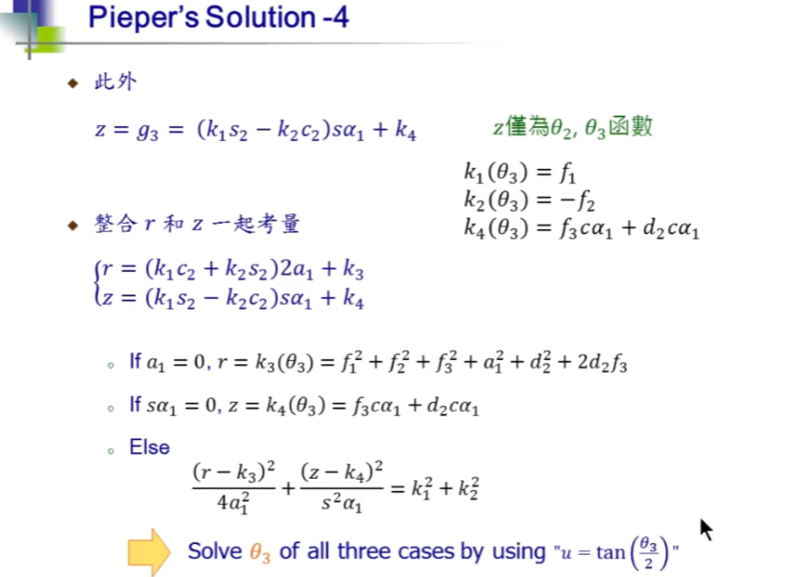
代数解
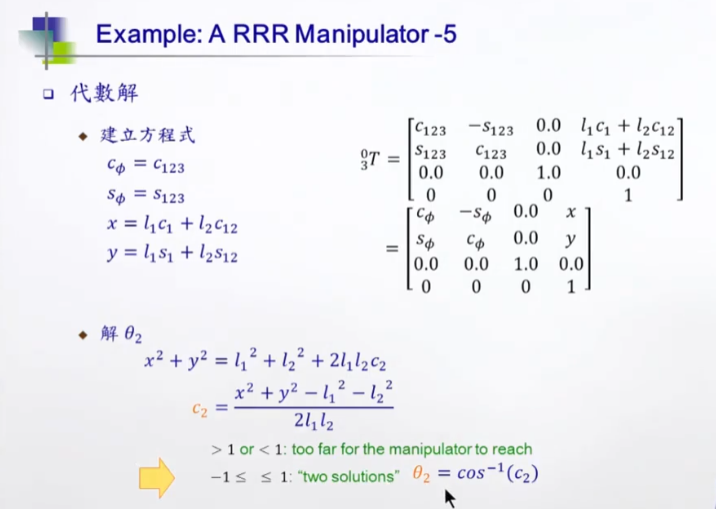
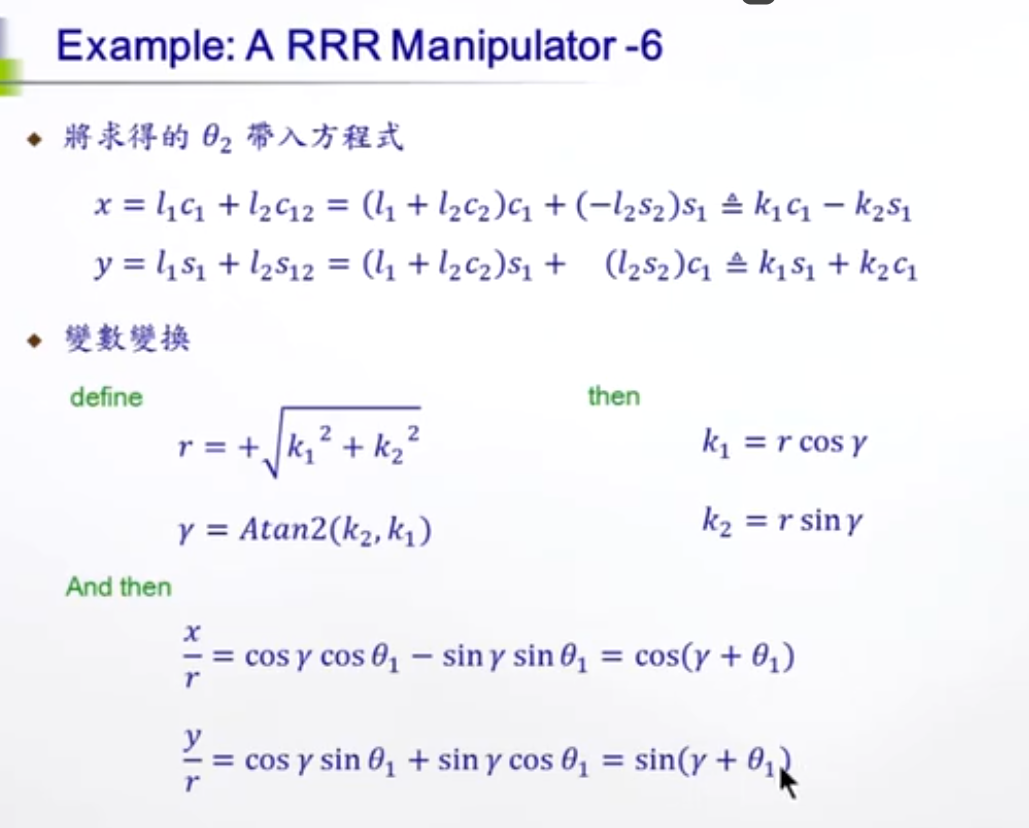
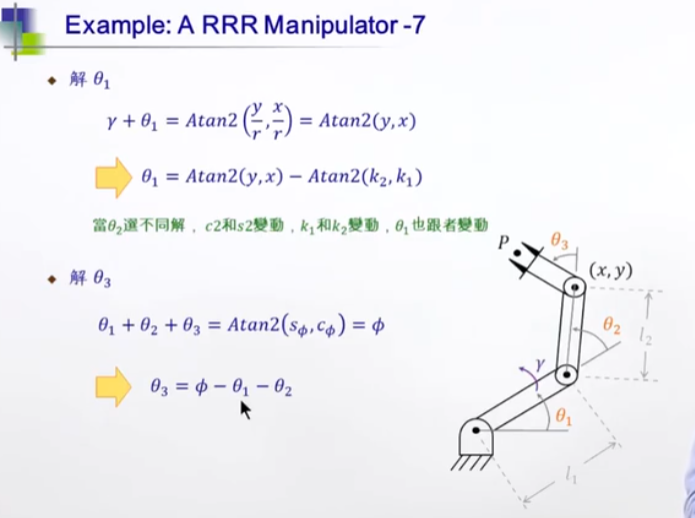
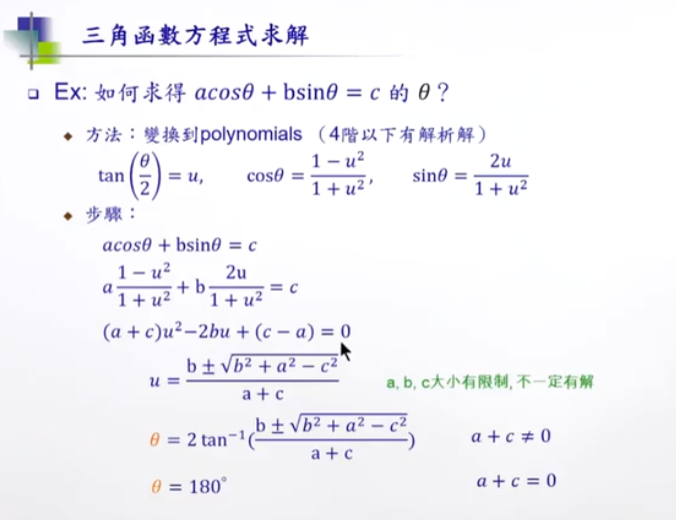
三角函数方程式求解

















 1309
1309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









