







机械臂力控制简介
一、力控制分类
力控制根据对机器人与接触环境作用力控制方式的不同可分为直接力控制和间接力控制两大类。直接力控制主要有基于位置的力控制、混合力位控制、并联力位控制三种;间接力控制有阻抗控制和导纳控制两种。
二、直接力控制
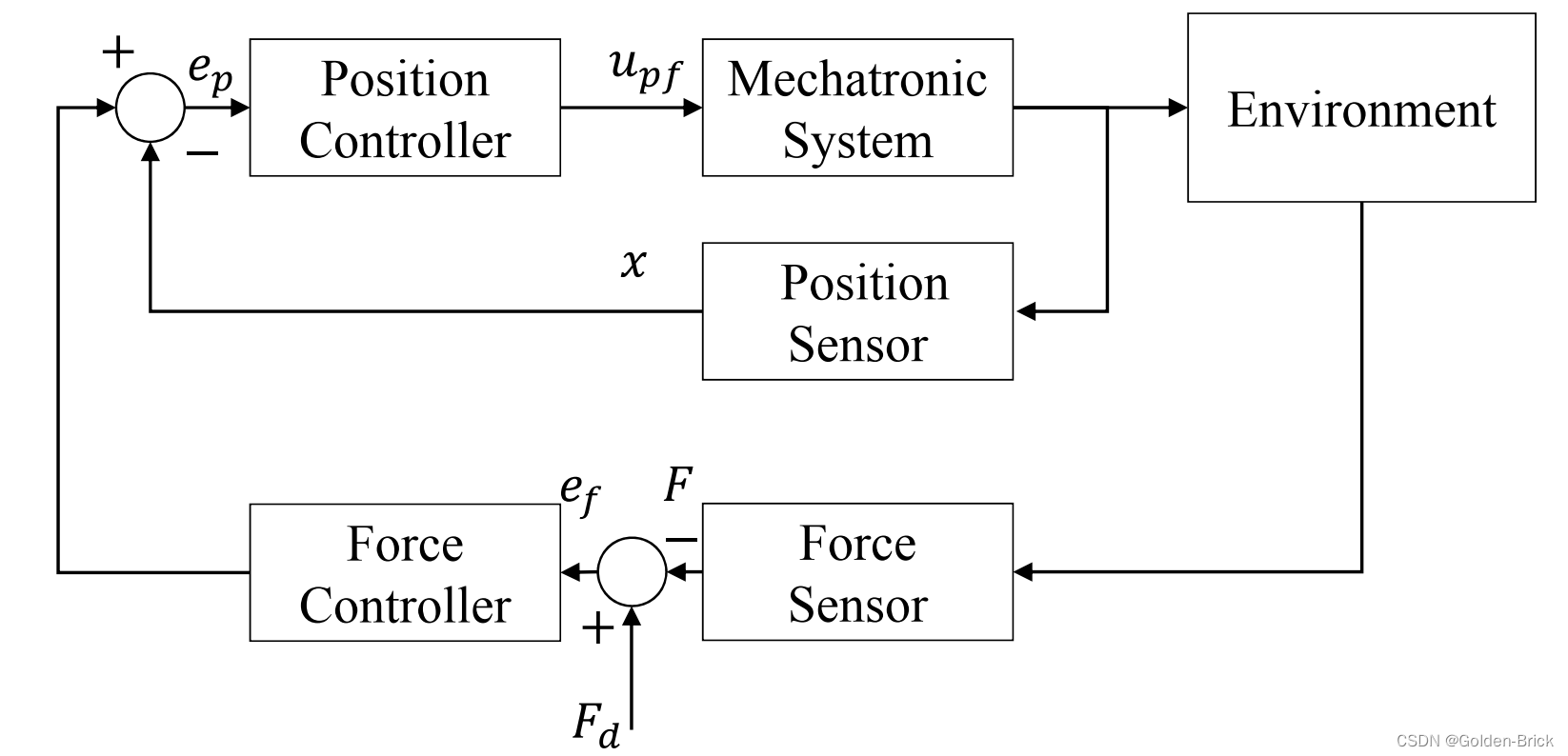
1.基于位置的力控制
该控制方法最常见于简单的零力拖动示教方案,当然要实现零力拖动示教控制回路中还需要重力补偿和摩擦力摩擦。基于位置的力控制的一个优点是其实现简单,无需修改原有系统中现有的位置控制即可实现。 但是,力控制的带宽会受到内环中的位置控制的限制。通常位置环路的带宽远小于力控制回路的带宽。
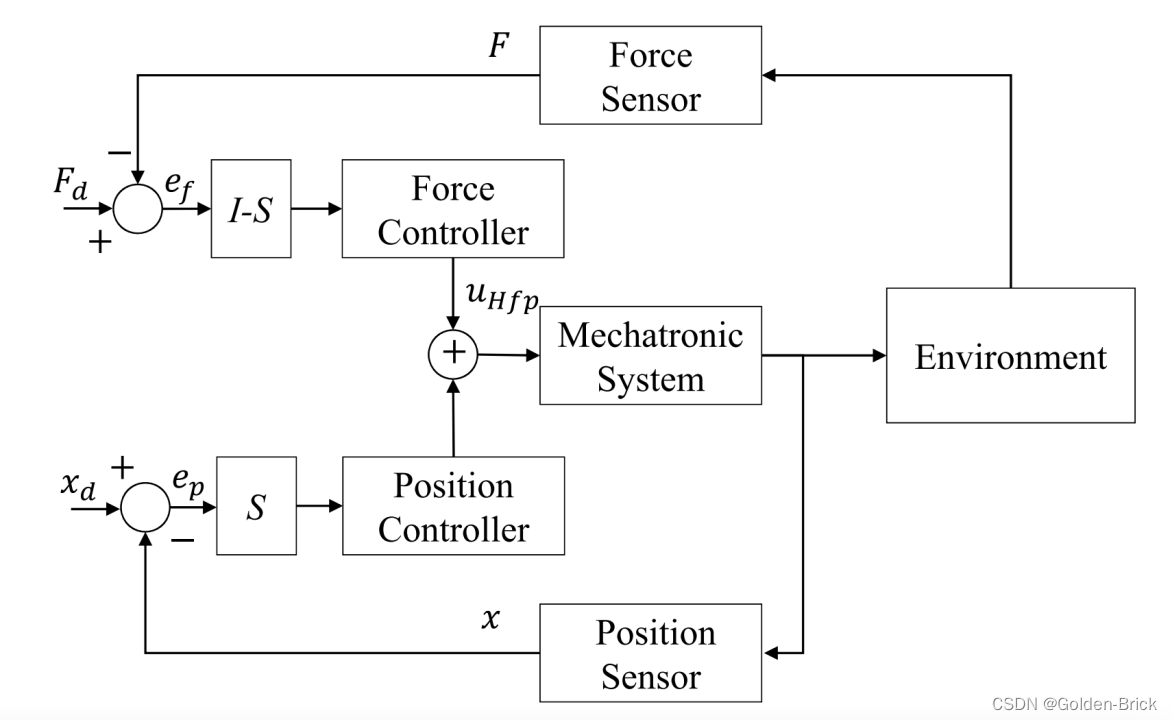
2.混合力位控制
该控制方法主要是通过一个选择矩阵S,根据自然约束和人工约束把机器人运动空间变成两个互补正交的子空间,最终将与环境的交互问题转换为几何约束问题。
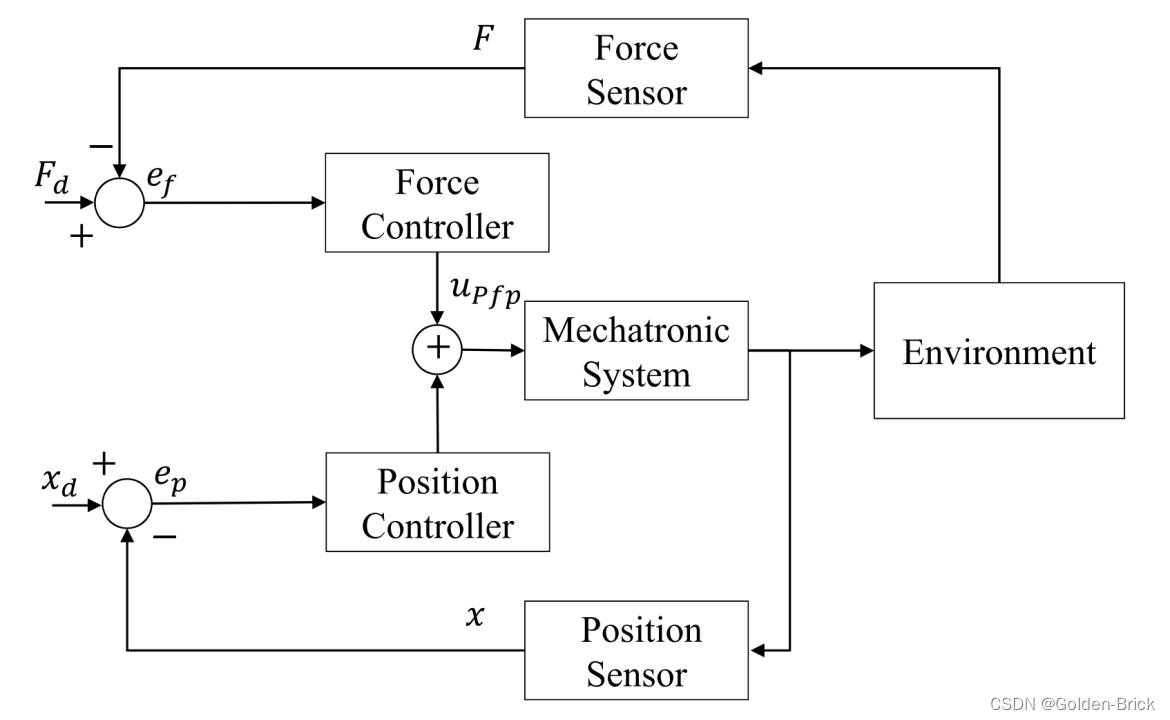
3.并联力位控制
并联力位控制为了避免对环境模型的依赖,取消了混合力位控制的选择矩阵S。控制上采用了优先策略:力控制回路的设计优于位置控制回路。位置控制采用PD控制,力控制采用PI控制。该方法的主要缺点是动态性能比混合力位控制慢,并且设计上比较复杂(待研究)。
三、间接力控制
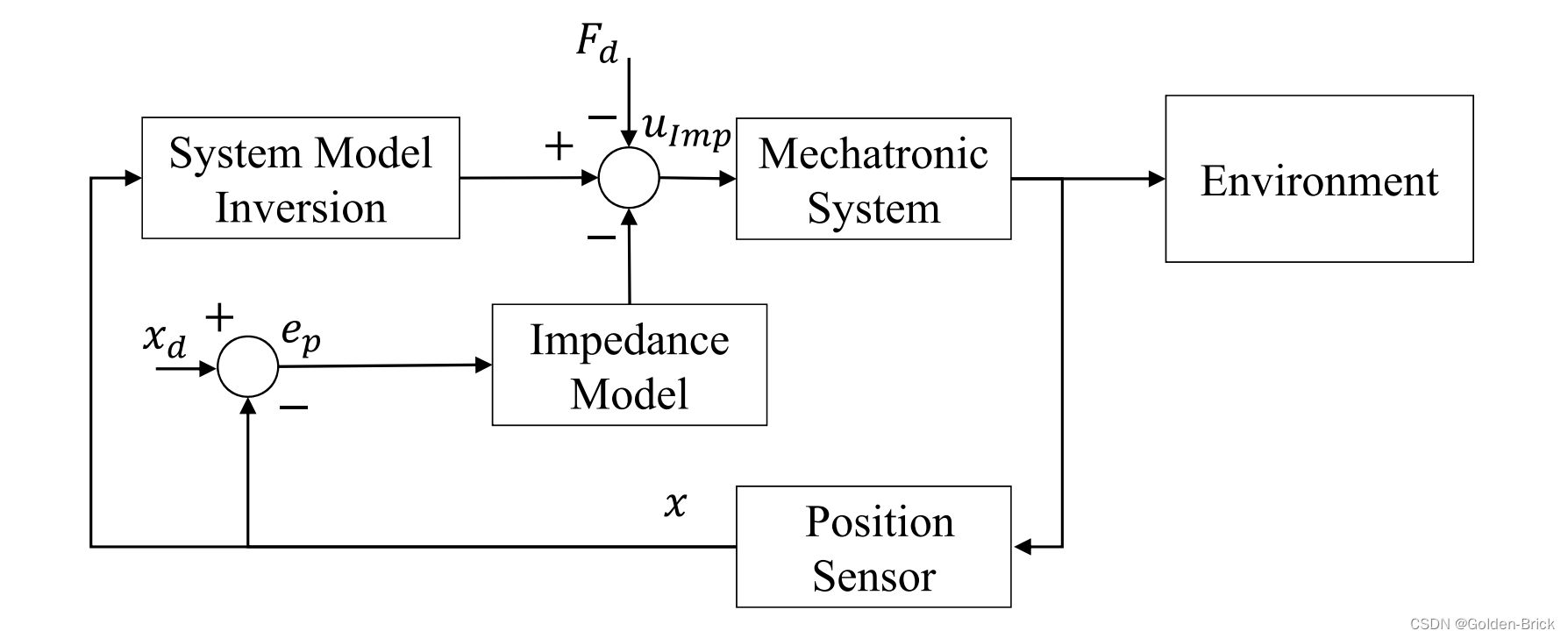
1.阻抗控制
Nevill Hogan在三篇< Impedance Control: An Approach to Manipulation >论文中分别阐述了阻抗控制原理、实施及应用。阻抗控制的原理是把机器人末端与接触环境的相互作用看作是由一个弹簧-阻尼-质量组成的二阶系统,大致的控制框架如下图所示。实际的应用中根据反馈信号的不同控制框图有多种变化。
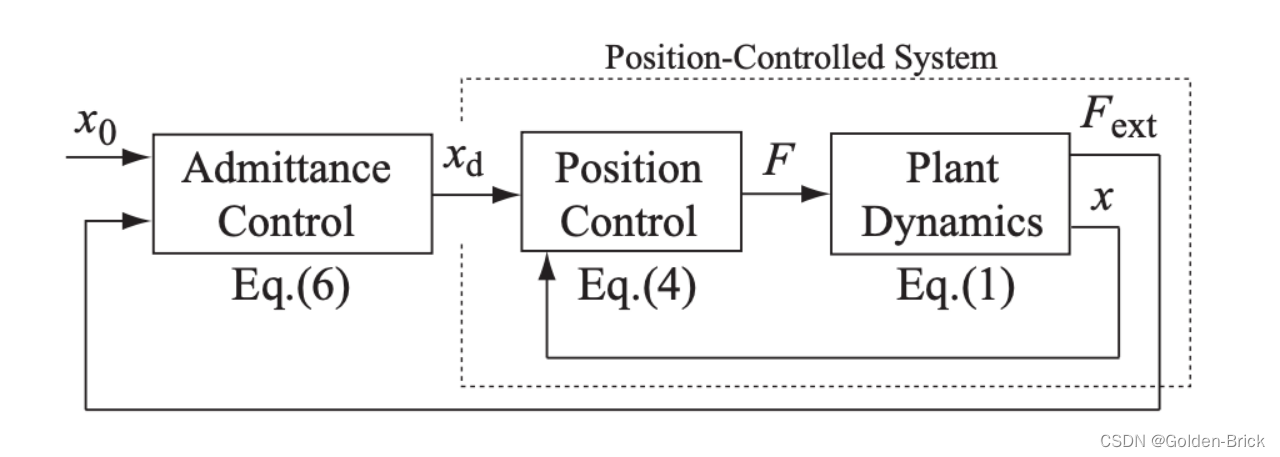
2.导纳控制
导纳控制跟阻抗控制在原理上是相同的,都是让机器人对外体现出由弹簧-阻尼-质量组成的二阶系统的动态特性。两者的区别在于其控制方法上:阻抗控制控制回路外环为位置控制器,内环为力控制器;导纳控制则相反,外环为力控制器,内环为位置控制器。两者的应用场景也不一样:阻抗控制适用于高刚度环境;导纳控制适用于低刚度环境。 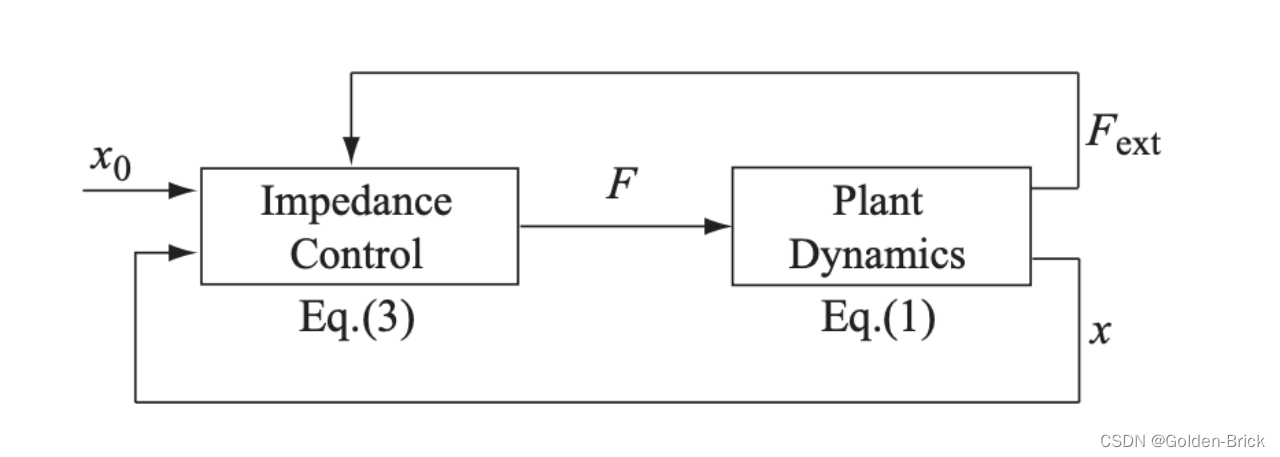
总结
本文仅仅粗略介绍了机械臂力控制的几种控制方法,以对机械臂力控制有个大致的了解,并不涉及具体的数学原理和实际应用。
- Force and Position Control of Mechatronic Systems : Design and Applications in Medical Devices

















 987
987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









