






点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

理解好图像的点云拼接,需要从相机的模型说起。理解相机的成像原理之后,便可更为深刻的理解图像的点云如何拼接在一起。
首先说下相机的概念与原理。
相机概念与原理
相机的作用:将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)。
通常我们见到的相机都是针孔相机,但是不是简单的 针孔,还有透镜的畸变存在,所以在做图像处理时要进行畸变校正。
由于畸变的存在,我们在使用相机之前都要进行相机标定。
目的就是求出内参对于简单的应用求出径向畸变和切向畸变就够了。
所谓的外参就是相机的位姿。
有了外参、内参、图像、深度信息 便可以把图像中的点,转到世界坐标系下,并带有RGB的颜色。就形成了所谓的点云。
相关的公式也很好理解 ,就是通过相似三角形的原理。
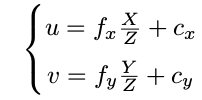
注意其中fx 、fy、 cx 、cy也就是相机的内参了。在相机出厂时会给出。
理解了相机的概念与原理,来编辑代码实现下。
Code实现
全部代码
先放上全部代码,再进行分段讲解
#include <iostream>
#include <fstream>
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <Eigen/Geometry>
#include <boost/format.hpp> // for formating strings
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
int main( int argc, char** argv )
{
vector<cv::Mat> colorImgs,depthImgs;//彩色图和深度图
vector<Eigen::Isometry3d> poses;//相机位姿
ifstream fin("../pose.txt");//文件读入 相机位置 文件
if(!fin)//相机位姿读入失败
{
cerr<<"请在有pose.txt的目录下运行此程序"<<endl;
return 1;
}
for(int i=0;i<5;i++)
{
boost::format fmt("../%s/%d.%s");//图像文件格式
colorImgs.push_back(cv::imread((fmt%"color"%(i+1)%"png").str())); // 读取彩色图像
depthImgs.push_back( cv::imread( (fmt%"depth"%(i+1)%"pgm").str(), -1 )); // 使用 -1 读取原始图像
//读取相机位姿
double data[7]={0};
for(auto& d:data)
fin>>d;
Eigen::Quaterniond q( data[6], data[3], data[4], data[5] );
Eigen::Isometry3d T(q);
T.pretranslate( Eigen::Vector3d( data[0], data[1], data[2] ));
poses.push_back( T );
}
//相机内参
double cx=325.5;
double cy=253.5;
double fx=518.0;
double fy=519.0;
double depthScale = 1000.0;
cout<<"正在将图像转换为点云..."<<endl;
//定义点云使用的格式 用XYZRGB
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
//新建一个点云
PointCloud::Ptr pointCloud( new PointCloud );
for(int i=0;i<5;i++)
{
cout<<"转换图像中:"<<i+1<<endl;
cv::Mat color = colorImgs[i];//获得 要处理的彩色图像
cv::Mat depth = depthImgs[i];//获得 要处理的深度图像
Eigen::Isometry3d T = poses[i];//获得 对应的pose
for(int v=0 ; v<color.rows;v++)//处理每个像素
{
for(int u=0 ; u<color.cols;u++)
{
unsigned int d = depth.ptr<unsigned short>(v)[u];//深度值
if(d==0) continue;//为0 表示没有测量到
Eigen::Vector3d point;//相机坐标系下的点
//计算相机坐标系下的点的坐标
point[2] = double(d)/depthScale;
point[0] = (u-cx)*point[2]/fx;
point[1] = (v-cy)*point[2]/fy;
Eigen::Vector3d pointWorld = T*point;//转换到世界坐标系下
PointT p;//声明点云
p.x = pointWorld[0];//赋值点云位置
p.y = pointWorld[1];
p.z = pointWorld[2];
p.b = color.data[ v*color.step+u*color.channels() ];//赋值点云对应RGB颜色
p.g = color.data[ v*color.step+u*color.channels()+1 ];
p.r = color.data[ v*color.step+u*color.channels()+2 ];
pointCloud->points.push_back( p );
}
}
}
pointCloud->is_dense = false;
cout<<"点云共有"<<pointCloud->size()<<"个点."<<endl;
pcl::io::savePCDFileBinary("map.pcd", *pointCloud );//保存点云文件
return 0;
}
代码讲解
vector<cv::Mat> colorImgs,depthImgs;//彩色图和深度图
vector<Eigen::Isometry3d> poses;//相机位姿
ifstream fin("../pose.txt");//文件读入 相机位置 文件
if(!fin)//相机位姿读入失败
{
cerr<<"请在有pose.txt的目录下运行此程序"<<endl;
return 1;
}
for(int i=0;i<5;i++)
{
boost::format fmt("../%s/%d.%s");//图像文件格式
colorImgs.push_back(cv::imread((fmt%"color"%(i+1)%"png").str())); // 读取彩色图像
depthImgs.push_back( cv::imread( (fmt%"depth"%(i+1)%"pgm").str(), -1 )); // 使用 -1 读取原始图像
//读取相机位姿
double data[7]={0};
for(auto& d:data)
fin>>d;
Eigen::Quaterniond q( data[6], data[3], data[4], data[5] );
Eigen::Isometry3d T(q);
T.pretranslate( Eigen::Vector3d( data[0], data[1], data[2] ));
poses.push_back( T );
}
读取对应路径下的彩色图像、深度图像、相机的位姿。
上面说了,有了这三个量再加上相机内参,就可以得到点云。
//相机内参
double cx=325.5;
double cy=253.5;
double fx=518.0;
double fy=519.0;
double depthScale = 1000.0;
传说中的相机内参
//定义点云使用的格式 用XYZRGB
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
//新建一个点云
PointCloud::Ptr pointCloud( new PointCloud );
声明pcl的格式创建一个点云,然后开始for循环处理每一张图片和对应的深度图片与相机位姿。
cv::Mat color = colorImgs[i];//获得 要处理的彩色图像
cv::Mat depth = depthImgs[i];//获得 要处理的深度图像
Eigen::Isometry3d T = poses[i];//获得 对应的pose
得到要处理的彩色图像深度图像对应的pose,然后for循环处理每一个像素。
unsigned int d = depth.ptr<unsigned short>(v)[u];//深度值
得到深度信息
Eigen::Vector3d point;//相机坐标系下的点
//计算相机坐标系下的点的坐标
point[2] = double(d)/depthScale;
point[0] = (u-cx)*point[2]/fx;
point[1] = (v-cy)*point[2]/fy;
通过:
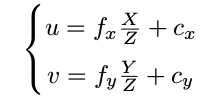
这个公式得到相机坐标系下的 x,y,z
Eigen::Vector3d pointWorld = T*point;//转换到世界坐标系下
相机坐标系下的点通过坐标变换转到世界坐标系下。
PointT p;//声明点云
p.x = pointWorld[0];//赋值点云位置
p.y = pointWorld[1];
p.z = pointWorld[2];
p.b = color.data[ v*color.step+u*color.channels() ];//赋值点云对应RGB颜色
p.g = color.data[ v*color.step+u*color.channels()+1 ];
p.r = color.data[ v*color.step+u*color.channels()+2 ];
赋值点云的坐标与颜色。
pcl::io::savePCDFileBinary("map.pcd", *pointCloud );//保存点云文件
保存成点云文件。
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、orb-slam3等视频课程)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 

















 1414
1414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









