







代码见本章末尾
SourceURL:file://文字文稿1
和2D图像的深度学习目标检测很不相同,点云数据具有两个显著特征,
- 相对2D图像来说,点云数据非常稀疏,
- 点云数据是三维的。
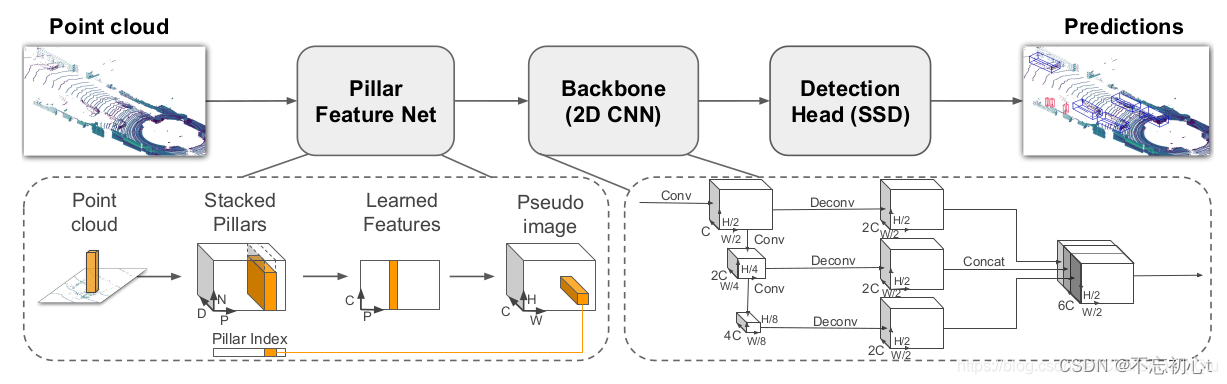
为了将图像领域卷积神经网络做模式识别的经验引入三维点云中,一些深度学习方法采用了三维卷积方法或者是将点云投射为2维深度图,还有一类方法是使用鸟瞰视角Bird’s Eye View,来组织点云数据的输入,相比于2维深度图,鸟瞰图不存在遮挡问题,但是数据分布更加稀疏,造成网络特征学习效率低下。
为了解决特征稀疏问题,一种做法是对鸟瞰视角下的平面做网格划分,然后提取网格内的某些统计学特征(百度CNN-SEG即是采用此方法做特征输入),显然人

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 7206
7206











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











