






dToF(直接飞行时间)雷达的发展前景非常广阔。随着技术的不断进步和应用场景的增多,dToF雷达在许多领域都有着重要的应用和发展前景,包括自动驾驶、机器人、无人机、工业3D检测等。

因为dToF应用前景广泛,掌握dToF系统设计和算法,具有较好的就业前景,然而市面上关于dToF点云处理的算法课程较多,关于dToF硬件建模设计的课程较少,掌握dToF系统级别的原理,以及系统级别的建模,能从本质上理解目前设计dToF系统的瓶颈,对应用层算法的设计具有重大的意义。
然而,想要掌握dToF系统的硬件设计,主要有以下几方面的难点:
高速信号处理:dToF系统需要对高速脉冲信号进行处理,以测量光脉冲飞行时间。这要求硬件设计能够处理高速信号和快速采样,以确保准确的时间测量。
低噪声设计:由于dToF系统需要精确测量飞行时间,任何噪声或干扰都可能导致测量误差。因此,硬件设计需要采取有效的低噪声技术和信号处理方法,以保持系统的高精度。
多通道数据处理:dToF系统通常需要同时处理多个通道的数据,每个通道对应于不同的距离测量。在硬件设计中,需要考虑如何有效地处理多个通道的数据,并确保数据之间的同步和准确性。
高帧率高精度测距算法的实现。
那么如何学习dToF系统的硬件设计呢?
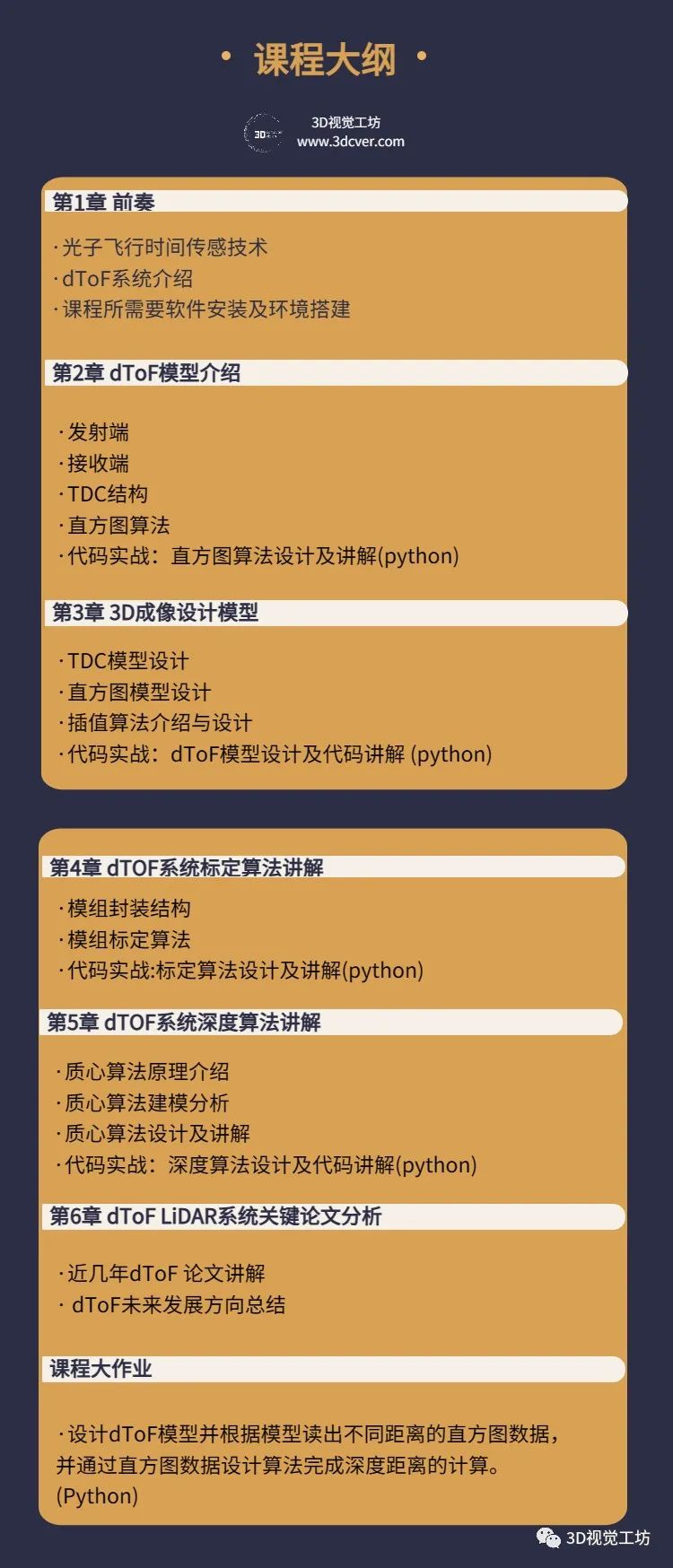
课程采用系统建模的方式带领大家认识dToF系统的组成部分,对dToF系统中的每个模块进行建模,最后收集到原始直方图数据,对直方图数据进行分析,设计高精度的测距算法来进行深度信息的提取。不仅为大家详细讲解dToF系统中的每个模块的原理,还手把手教大家进行dToF建模设计,带领大家对近年来dToF设计的优秀sci论文进行分析,还配有代码解读和实践课程,让大家真正活学活用,理解和掌握这些知识理论。
开课时间
2023年9月2日晚八点(周六),每周更新一章节。
课程答疑
本课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。

















 599
599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









