






Matlab学习卡尔曼滤波以及状态观测器的各种实例代码和模型
讲解,各种卡尔曼滤波的m代码,可以一行一行讲(KF,EKF,UKF,SRUKF,CKF,SRCKF等)
KF,EKF,UKF,SRUKF,CKF,SRCKF,滑模观测器,PID观测器等
本人硕士写的,有简单版本的纯m代码,也有进阶学习的Sfunction代码,以及simulink模型代码,代码附有详细的注释,提供卡尔曼滤波理论方面的。
ID:6166655409582654
车辆研究僧

Matlab是一种广泛应用于科学计算和工程技术领域的高级编程语言和环境。在众多的应用领域中,卡尔曼滤波和状态观测器是Matlab中常用的技术之一。本文将围绕这两个主题展开讲解,通过各种实例代码和模型的解析,帮助读者更好地理解和应用卡尔曼滤波和状态观测器。
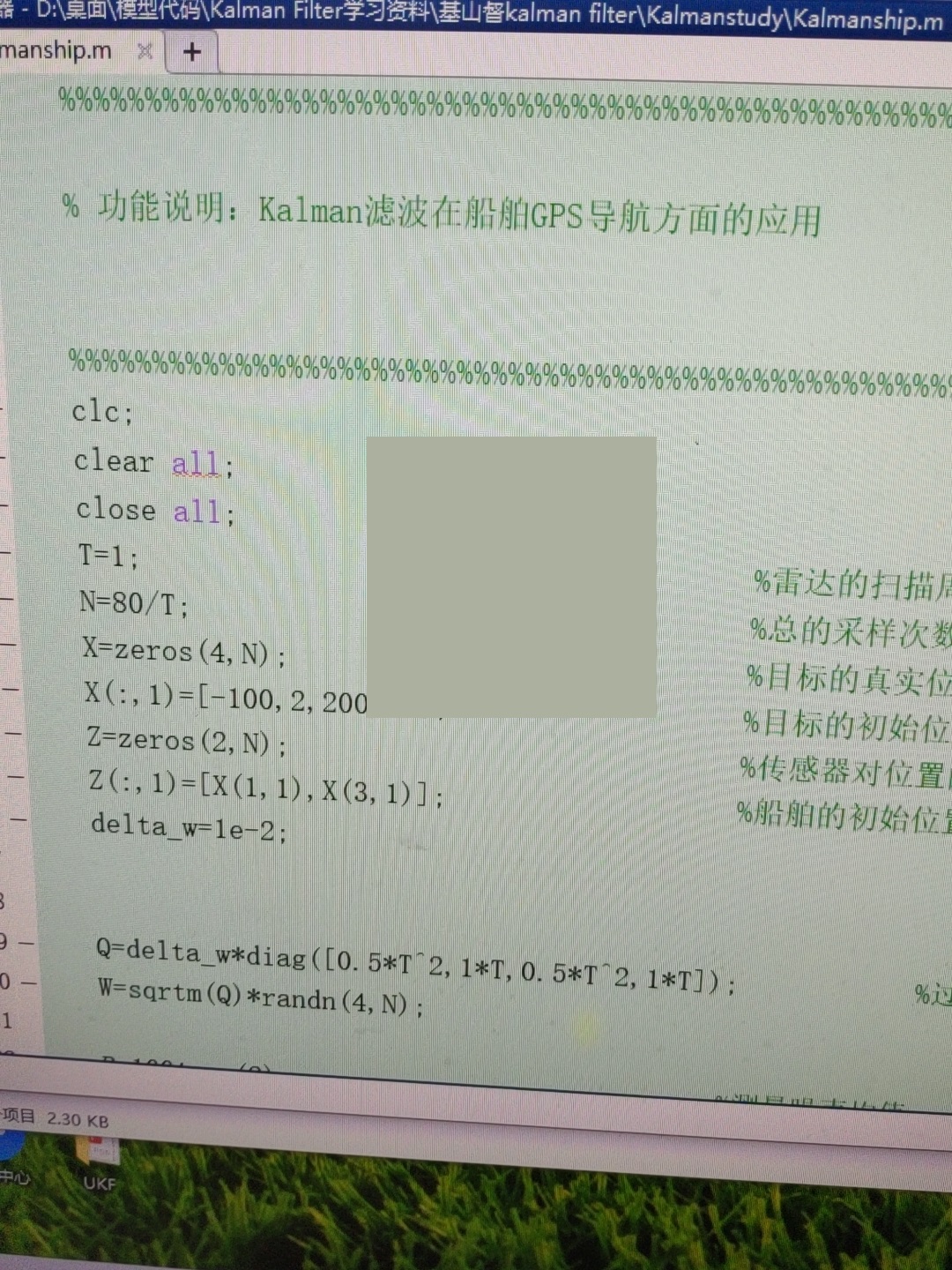
首先,我们将详细介绍卡尔曼滤波的各种实例代码。卡尔曼滤波是一种递归滤波算法,用于从一系列不完全的观测值中估计出系统的状态。在Matlab中,我们可以使用KF、EKF、UKF、SRUKF、CKF、SRCKF等多种卡尔曼滤波算法进行状态估计。通过一行一行的代码讲解,读者可以了解每种卡尔曼滤波算法的具体实现细节,以及它们的优缺点和适用场景。
除了卡尔曼滤波,本文还将介绍滑模观测器和PID观测器等其他类型的状态观测器。滑模观测器是一种基于滑模控制理论的观测器,可用于估计系统的状态。而PID观测器则是一种基于比例、积分、微分控制的观测器,通过对系统的误差进行适当的调节,实现状态的准确估计。通过对这些状态观测器的解析,读者将掌握不同类型观测器的原理和实现方法。
不仅如此,本文还提供了简单版本的纯m代码、进阶学习的Sfunction代码以及simulink模型代码。这些代码中都附有详细的注释,方便读者理解和使用。同时,读者还能深入学习卡尔曼滤波的理论方面知识,更好地应用于实际工程项目中。
总之,本文通过丰富的实例代码和模型讲解,全面介绍了Matlab中卡尔曼滤波和状态观测器的应用。通过对各种卡尔曼滤波算法的解析和不同类型观测器的讲解,读者将对这些技术有更深入的了解。同时,提供的代码和模型将帮助读者更好地理解和应用所学知识。
希望本文能为读者提供一个实实在在的技术分析文章,而不仅仅是广告软文。通过结构清晰、内容丰富的文章编写,我们希望能让读者像阅读大师级技术文章一样,获得丰富的技术分析知识。让我们一起深入学习Matlab中的卡尔曼滤波和状态观测器吧!
相关的代码,程序地址如下:http://coupd.cn/655409582654.html
















 961
961

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









