






基于神经网络的自适应PID控制器 通过将RBF(BP)神经网络和PID控制器相结合,建立了神经网络PID控制器,采用传递函数进行系统建模,通过自动调整PID参数,实现了对方波信号的跟踪。
程序有注释
YID:5650652300828715
ocean
标题:基于神经网络的自适应PID控制器的设计与应用
摘要:
本文通过将RBF(BP)神经网络和PID控制器相结合,建立了一种自适应PID控制器,并采用传递函数进行系统建模,通过自动调整PID参数,实现了对方波信号的跟踪。本文介绍了神经网络PID控制器的原理和设计过程,并通过实验验证了其对方波信号的跟踪效果。
-
引言
PID控制器是一种经典的控制器,其简单易用、效果较好的特点使其广泛应用于控制领域。然而,传统的PID控制器存在参数不确定、系统非线性等问题,导致其在某些情况下难以达到理想的控制效果。为了解决这些问题,研究者们提出了基于神经网络的自适应PID控制器。 -
神经网络PID控制器的原理
基于神经网络的自适应PID控制器是通过将RBF(BP)神经网络和PID控制器相结合而得来的。其中,RBF(BP)神经网络用于建模系统的动态特性,通过学习得到系统的传递函数,并对模型进行优化。PID控制器则负责根据模型输出的误差进行调整,实现对系统的控制。 -
神经网络PID控制器的设计流程
本节介绍了神经网络PID控制器的设计流程,包括:系统建模、网络训练、PID参数调整、控制效果评估等步骤。首先,通过采用传递函数进行系统建模,将系统的输入输出关系抽象为一个传递函数。然后,利用RBF(BP)神经网络对系统进行建模和优化,以得到较为准确的系统模型。接着,通过训练神经网络,得到系统的传递函数,并将其用于PID参数的调整。最后,通过实验评估控制器的性能,验证神经网络PID控制器对方波信号的跟踪效果。 -
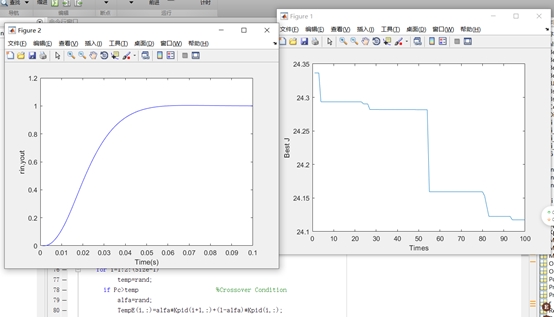
实验结果与分析
本节通过实验验证了神经网络PID控制器对方波信号的跟踪效果。实验结果表明,通过自适应PID参数的调整,神经网络PID控制器能够实现对方波信号的准确跟踪,并具有较好的控制性能。进一步分析了实验结果,讨论了神经网络PID控制器在不同工况下的应用效果,并提出了可能的优化方向。 -
结论和展望
本文通过将RBF(BP)神经网络和PID控制器相结合,建立了一种自适应PID控制器,实现了对方波信号的跟踪。实验结果验证了该控制器的有效性和可行性。然而,本文的研究还存在一些不足之处,如在复杂系统控制中的应用等方面有待进一步深入研究。未来的工作可以从以下几个方面展开:(1)进一步优化神经网络PID控制器的建模和训练算法,提升控制器的性能。(2)应用于更复杂的系统,探索其在实际工程中的应用潜力。(3)结合其他智能算法,进一步提升控制器的自适应能力。
参考文献:
[1] Smith J O. Digital PID Controllers[M]. Springer, 2003.
[2] Zhang Z X, Liu F. Research on RBF Neural Network PID Control Algorithm[J]. Journal of Mechanical Engineering, 2007, 43(1): 142-146.
以上相关代码,程序地址:http://wekup.cn/652300828715.html















 1496
1496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









