









一、安装RealSense的SDK2.0安装
1、注册服务器的公钥
sudo apt-get update
sudo apt-get upgrade
sudo apt-get dist-upgradesudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE2、将服务器添加到存储库列表中
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
3、安装SDK
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
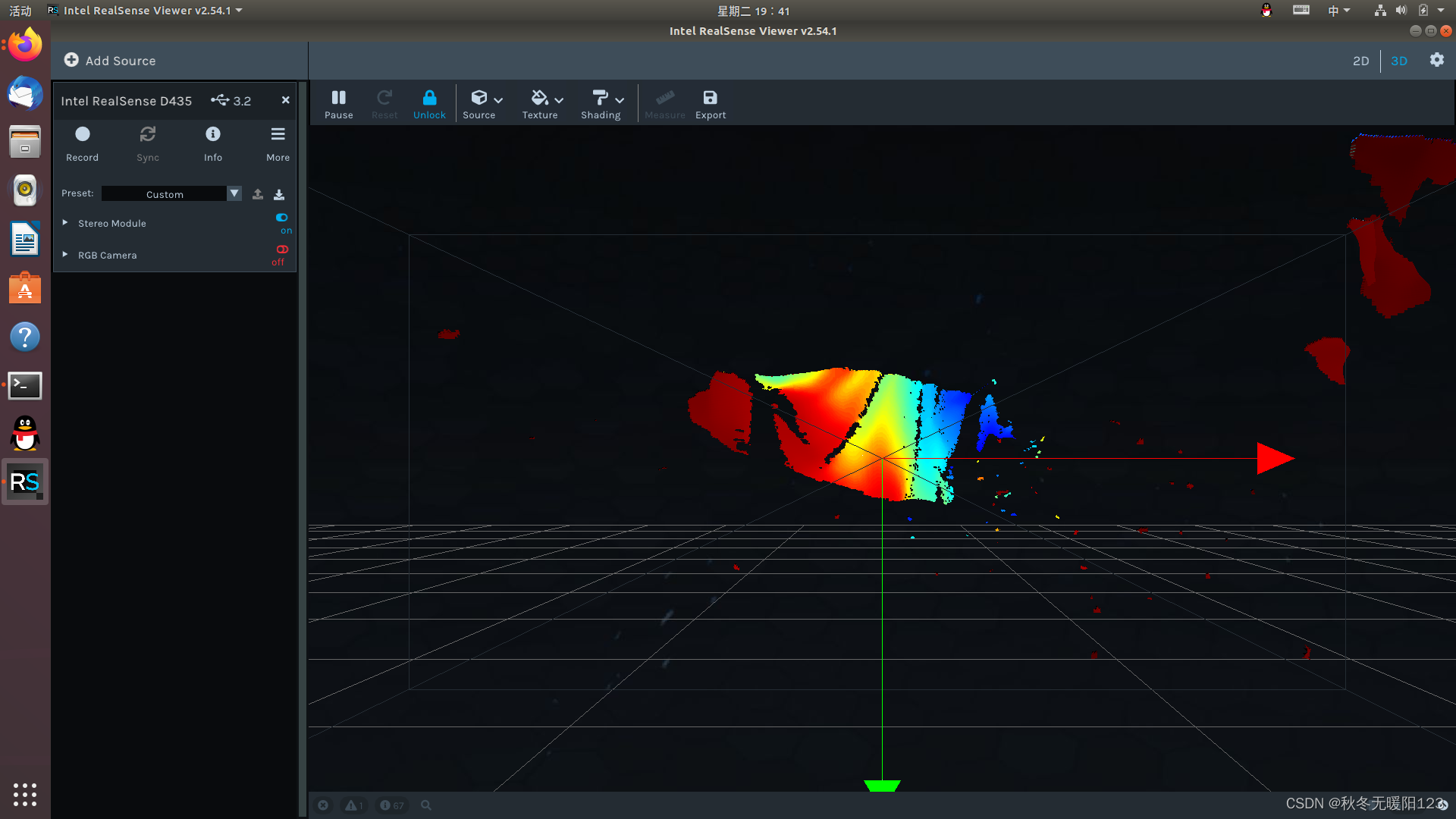
4、连接相机执行下列命令检测安装效果,使用USB3.0相连,否则USB3.0口可能会出问题
realsense-viewer
5、结果如下图所示
二、安装ROS
1、创建ROS工作空间
mkdir -p realsense435_ws/src
cd realsense435_ws/src
catkin_init_workspace2、下载realsense-ros安装包和ddynamic_reconfigure包,若无法下载可自行搜索尝试其他链接
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
3、对下载的包进行编译
cd ~/realsense_ws
catkin_make编译时有时会报以下错误:
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 4 packages in topological order:
-- ~~ - ddynamic_reconfigure
-- ~~ - realsense2_camera_msgs (plain cmake)
-- ~~ - realsense2_description (plain cmake)
-- ~~ - realsense2_camera (plain cmake)
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkin_workspace.cmake:100 (message):
This workspace contains non-catkin packages in it, and catkin cannot build
a non-homogeneous workspace without isolation. Try the
'catkin_make_isolated' command instead.
Call Stack (most recent call first):
CMakeLists.txt:69 (catkin_workspace)
解决方案:
进入realsense-ros文件夹,执行以下操作完成编译
cd ~/realsense435_ws/src/realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ~/realsense435_ws
catkin_make clean
catkin_make


三、测试
1、安装完成后进入工作空间执行以下操作进行验证
cd realsense435_ws
source devel/setup.bash
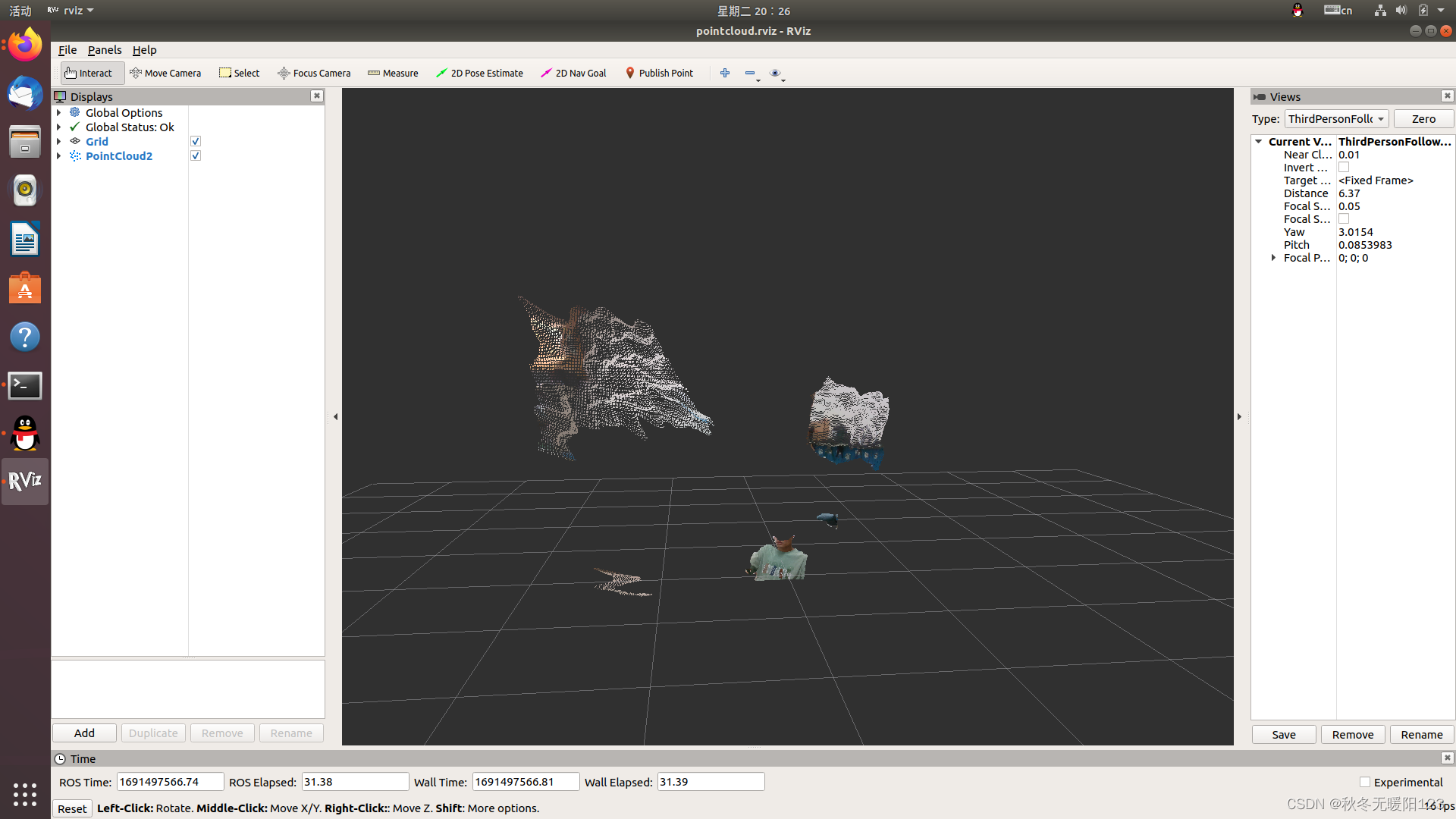
roslaunch realsense2_camera demo_pointcloud.launch #点云效果如下图所示:
2、启动各个节点,执行不同launch文件,启动的节点会有所不同
roslaunch realsense2_camera rs_camera.launch
roslaunch realsense2_camera rs_rgbd.launch # /camera/depth_registered/points如下图,节点启动成功

四、相关参考链接
1、Ubuntu20.04LTS下安装Intel Realsense D435i驱动与ROS包_ubuntu20 安装realsense_wanghq2013的博客-CSDN博客
2、Ubuntu18.04+ROS melodic +RealSense D435i的使用_ros-melodic-rgbd-launch_YOULANSHENGMENG的博客-CSDN博客














 4108
4108











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









