







本文针对传统 RRT 算法在自动导引车(AGV)路径规划中的局限性,提出了一种改进的 RRT 算法。该方法在原有 RRT 基础上,采用目标偏向采样策略,加快了搜索树向目标区域的扩展,同时结合步长限制和高效的碰撞检测机制,确保了在复杂障碍环境中能够快速生成安全的可行路径。为进一步提高路径质量,本文还设计了后处理平滑技术,对初步规划得到的路径进行优化,消除冗余节点,降低路径总长度并提升行驶平稳性。实验结果表明,改进算法在规划效率和路径平滑度上均显著优于传统 RRT 方法,能够满足 AGV 实际应用对路径安全性和实时性的要求。
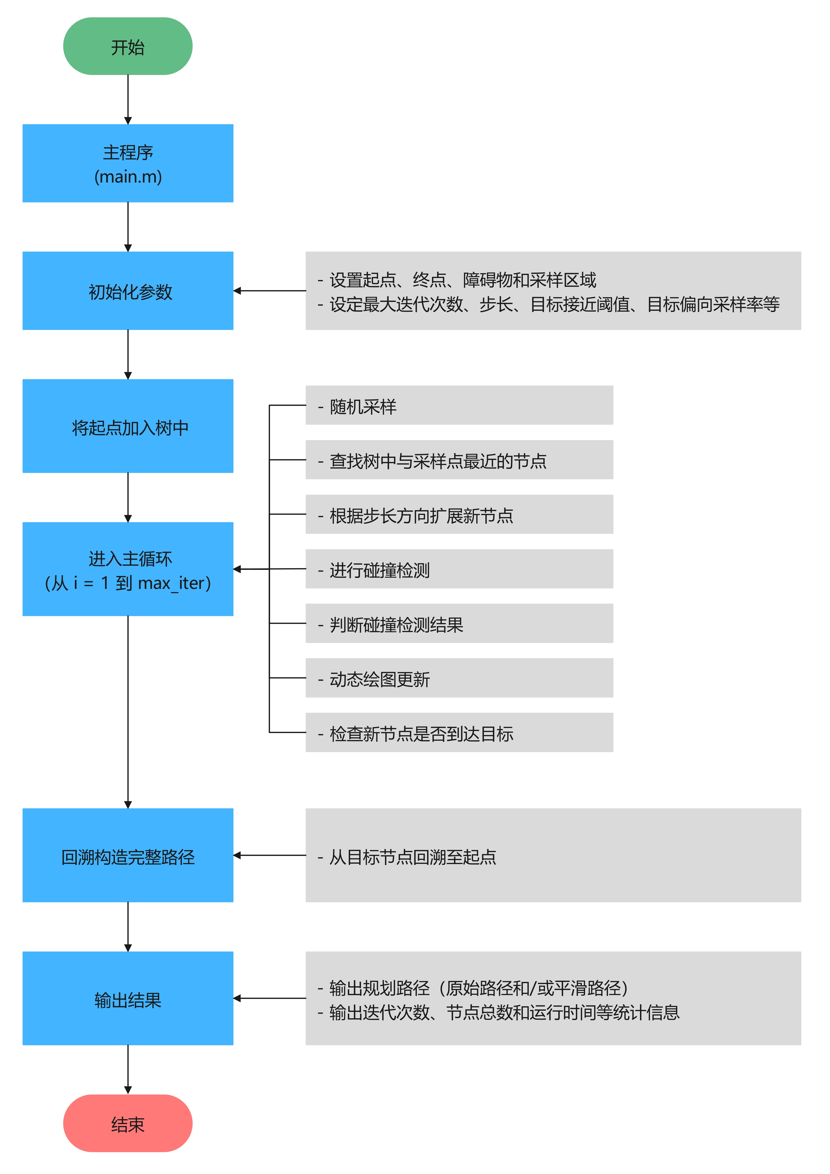
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
运行效果
运行 main.m
1.路径生成过程与动态可视化
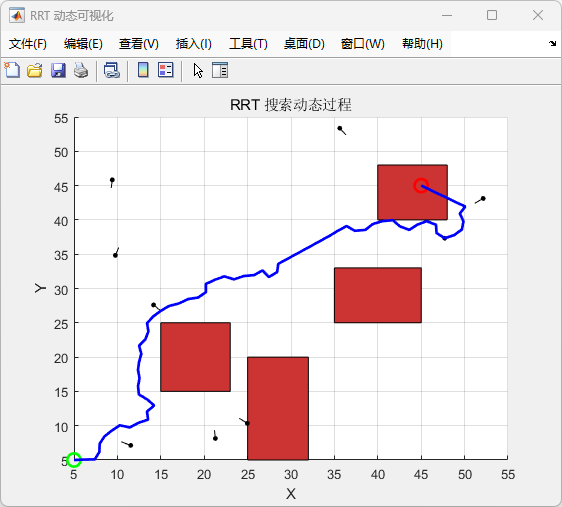
动态搜索过程(Figure 1)
(1)在“RRT 搜索动态过程”图中,蓝色线条逐步向目标方向扩展。
(2)可以看到在初期采样时,算法会随机地往各个方向扩展,逐渐绕过障碍物向右上方前进;由于设置了“目标偏向采样率 (goal_sample_rate)”,在一定概率下会直接将目标作为采样点,从而帮助算法更快地向目标收敛。
(3)每迭代一定次数后(默认每 50 次),会在图上绘制当前扩展的树(黑色连线与节点),直观地展示搜索过程。
最终路径可行性
(1)最终成功连接到了目标点 (45, 45),说明在给定的障碍环境下,算法确实找到了无碰撞的可行路径。
(2)若搜索过程中未能找到可行解,图上会看到树停留在某些区域,同时输出提示“未找到路径”。本次实验则顺利完成了规划。
2. 原始路径与平滑路径
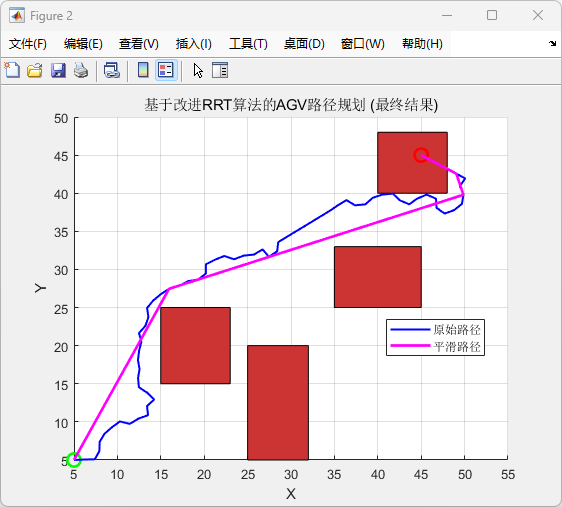
原始路径(Figure 2 中的蓝色线条)
(1)这是通过 RRT 树回溯得到的“离散”折线路径,通常会包含一些较明显的“折返”或“转弯”段落。
(2)该路径长度从日志来看是 83.923,在算法刚找到可行解时,会因为树的随机性和局部搜索策略导致路径不是最短。
平滑路径(Figure 2 中的粉色线条)
(1)对原始路径进行平滑处理后,可以去掉一些多余的折线,整体路径更平滑,便于实际 AGV 行驶。
(2)平滑后长度约为 68.686,相较于原始路径减少了近 15 个单位长度(约 18% 的长度缩减),这表明平滑算法在“剪掉”多余节点方面较有效。
平滑效果
(1)平滑处理常见的实现思路是依次检测路径上的各段,若两段或多段能够直接相连且无碰撞,则将中间多余的节点去除;或者基于一些梯度/采样优化方法不断“拉直”局部弧段。
(2)经过平滑后,路径在障碍物边缘依然保持安全距离,同时明显减少了曲折程度。
3. 运行时间与迭代情况
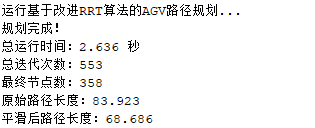
运行时间
(1)总运行时间约 2.636 秒。
(2)在 MATLAB 环境下,包含实时绘图和碰撞检测,能在数秒内完成 553 次迭代并找到可行解,说明算法效率在该规模障碍环境下是可以接受的。
迭代次数与节点数
(1)实际迭代次数 553,最终树节点数 358。
(2)迭代次数和节点数并不相同,是因为部分迭代可能在扩展新节点时检测到碰撞,无法将新节点加入树;也可能因为 RRT 并非每一次迭代都一定能生成一个新节点。
(3)目标偏向采样率等超参数的不同取值也会影响到迭代效率、最终节点规模和路径质量。
该实验成功展示了改进 RRT 算法在 2D 平面中的动态搜索过程,能以较快速度找到可行解。通过后期平滑,路径长度由约 83.9 缩减到 68.7,证明了平滑处理在提升路径质量方面的有效性。这为 AGV 等移动机器人在未知或半未知环境下的快速路径规划提供了一个可行思路。

















 57
57

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









