






无人船/无人艇路径跟踪控制 Matlab/ Simulink效果
基于Foseen船舶模型,LOS制导子系统+反步控制器制作 LOS+backstepping;
注:采用ESO实现漂角/侧滑角估计
ID:96114744634403819
全身而退
无人船和无人艇的路径跟踪控制一直是无人船技术领域中的重要研究方向。对于无人船来说,路径跟踪控制是实现船舶自主导航的核心技术之一。在本文中,我们将介绍一种基于Foseen船舶模型的路径跟踪控制方法,并结合LOS制导子系统和反步控制器实现控制效果的仿真验证。同时,我们还将介绍采用ESO实现漂角和侧滑角估计的方法。
Foseen船舶模型是一种常用的船舶动力学模型,它能够描述无人船在水中的运动轨迹和姿态变化。在路径跟踪控制中,我们首先需要建立一个合适的数学模型来描述无人船的运动特性。Foseen船舶模型基于艇体的质量、惯性矩阵和水动力学参数等因素,能够准确地描述无人船在不同环境下的运动。
LOS制导子系统是一种常用的路径跟踪控制方法,它基于船舶当前位置和目标位置之间的角度误差来实现船舶的导航控制。LOS制导子系统能够将角度误差转化为船舶的控制指令,以使船舶能够按照预定的路径进行导航。在本文中,我们采用LOS制导子系统来实现无人船的路径跟踪控制。
反步控制器是一种常用的控制器设计方法,它能够将系统的状态误差转化为控制输入,并通过迭代的方式逐步减小误差。在路径跟踪控制中,我们使用反步控制器来实现无人船的姿态调整和速度控制。通过设计合适的反步控制器参数,我们能够使无人船按照预定的路径进行导航,并保持良好的姿态和速度控制效果。
除了路径跟踪控制方法,本文还采用ESO(Extended State Observer)来实现无人船漂角和侧滑角的估计。ESO是一种常用的状态估计方法,它能够根据系统的输入和输出来估计系统的未测量状态。在路径跟踪控制中,我们使用ESO来估计无人船的漂角和侧滑角,以提高路径跟踪控制的精度和鲁棒性。
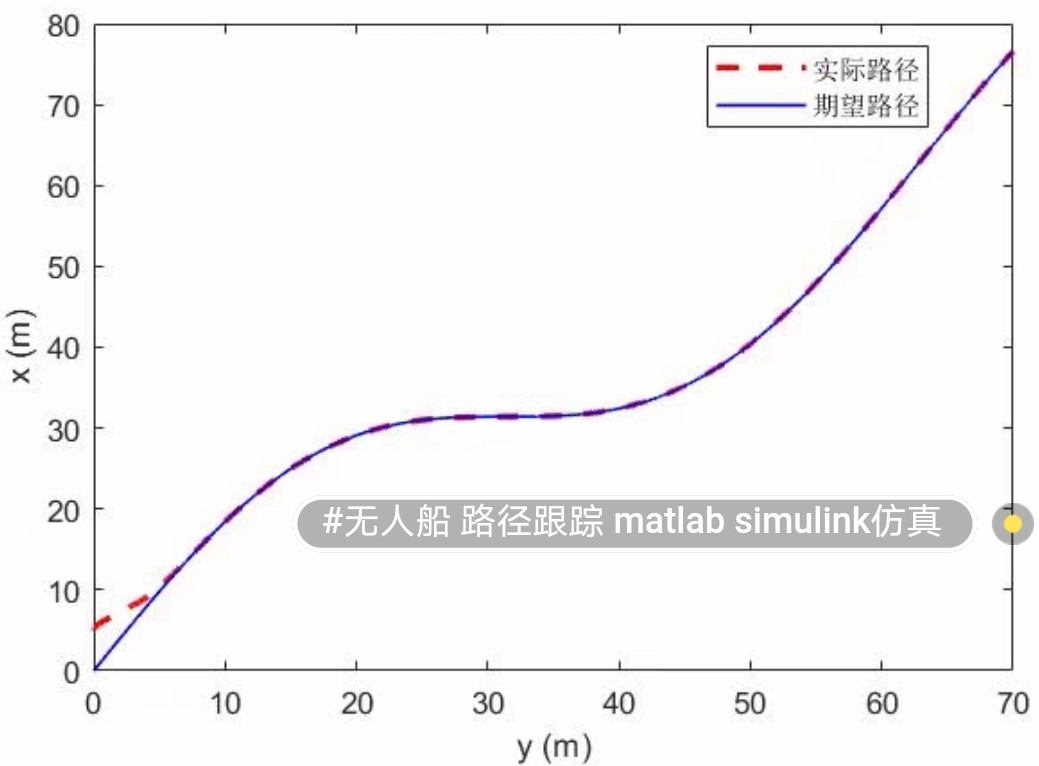
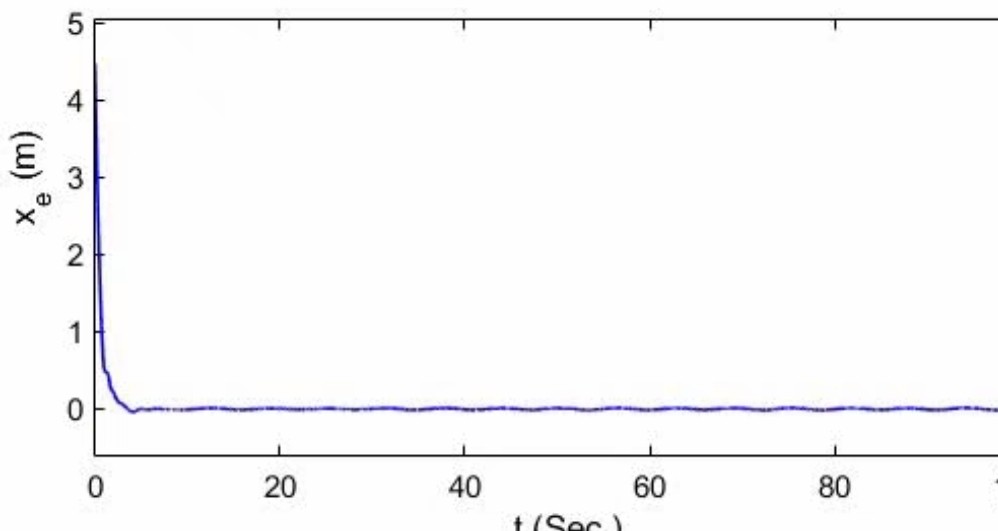
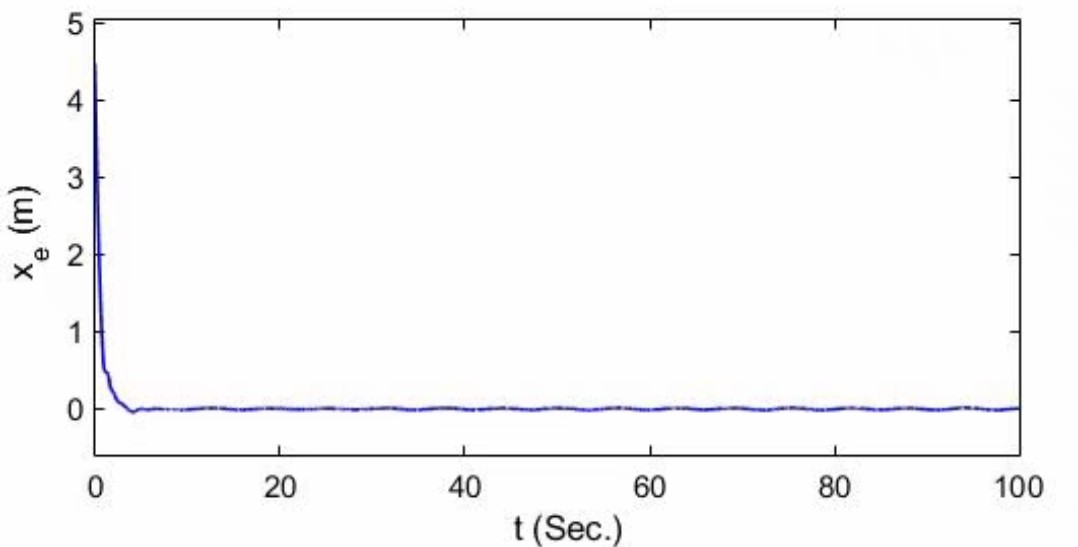
通过Matlab和Simulink的仿真实验,我们验证了基于Foseen船舶模型、LOS制导子系统和反步控制器的路径跟踪控制方法的有效性。仿真结果表明,该控制方法能够使无人船按照预定的路径进行导航,并保持良好的姿态和速度控制效果。同时,采用ESO实现漂角和侧滑角估计的方法能够提高路径跟踪控制的精度和鲁棒性。
综上所述,本文介绍了基于Foseen船舶模型、LOS制导子系统和反步控制器的路径跟踪控制方法,并结合ESO实现漂角和侧滑角估计。通过Matlab和Simulink的仿真实验,验证了该控制方法的有效性。这种路径跟踪控制方法在无人船技术领域中具有重要的应用价值,能够为无人船的自主导航提供有效的控制手段。同时,采用ESO实现漂角和侧滑角估计的方法也为路径跟踪控制的精度和鲁棒性提供了有效的提升途径。希望本文对于无人船技术研究者和工程师们有所启发和帮助。
【相关代码,程序地址】:http://fansik.cn/744634403819.html
















 1070
1070











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









