








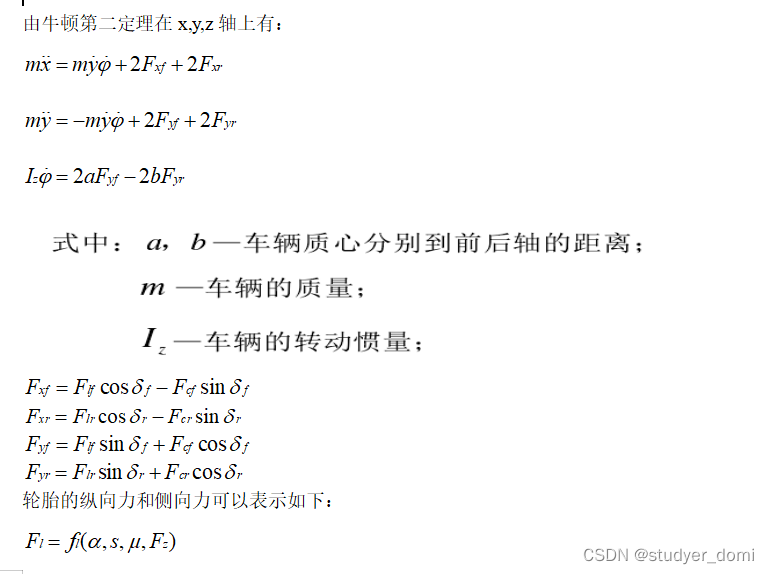

由牛顿第二定理在x,y,z轴上有:
轮胎的纵向力和侧向力可以表示如下:
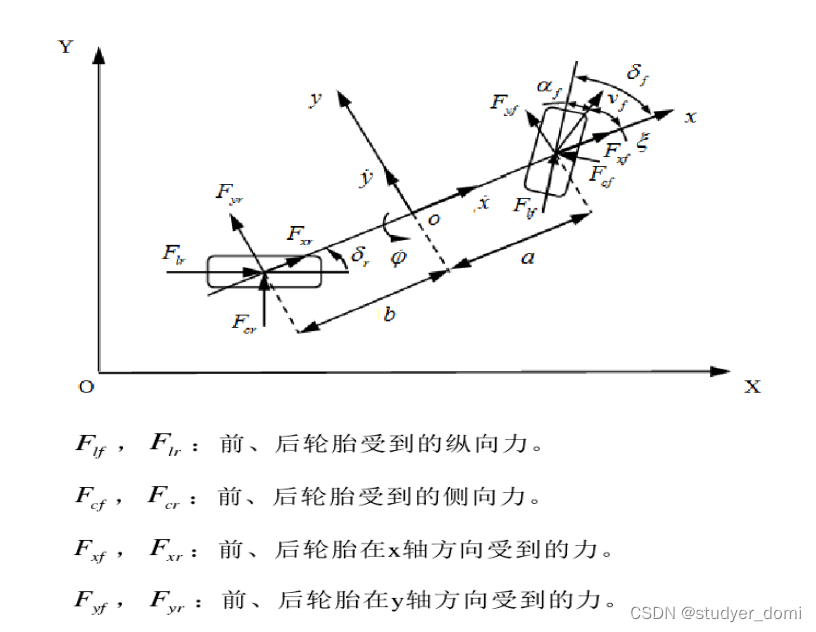
前轮车速与x轴夹角可表示为:
前后轮胎侧偏角:
前后轮胎侧偏力:
前后轮胎纵向力:
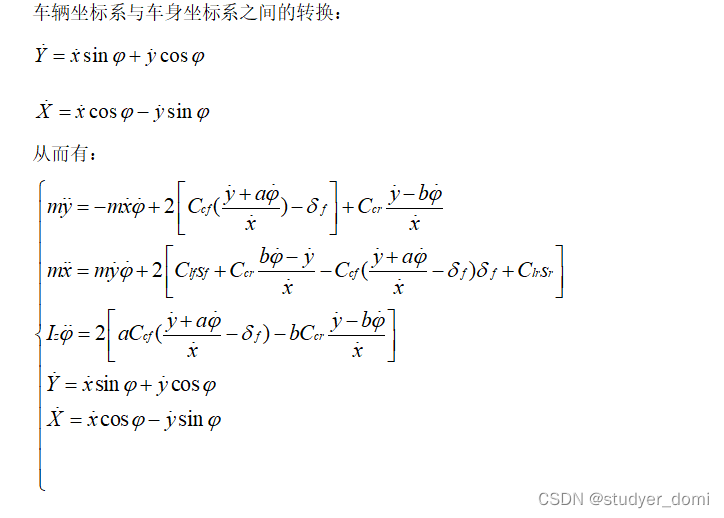
车辆坐标系与车身坐标系之间的转换:
从而有:
clear
clc
close all
V=80/3.6;%车速
Sf=0.2; Sr=0.2;
sf=0.2; sr=0.2;
%syms a b;%前后车轮距离车辆质心的距离,车辆固有参数
a=1.232;b=1.468;
%syms C_cf C_cr C_lf C_lr;%分别为前后车轮的纵横向侧偏刚度,车辆固有参数
Ccf=66900;Ccr=62700;Clf=66900;Clr=62700;
%syms m g I;%m为车辆质量,g为重力加速度,I为车辆绕Z轴的转动惯量,车辆固有参数
m=1723;g=9.8;I=4175;
% 车辆动力学模型求解


















 668
668

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









