







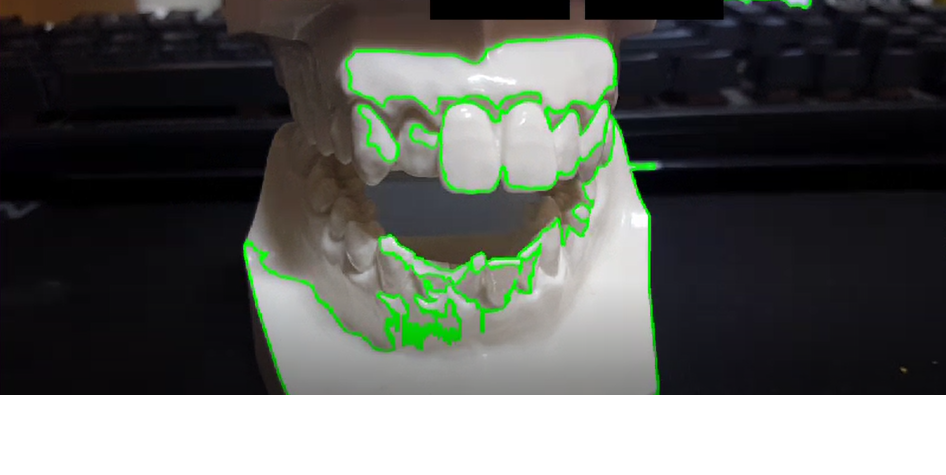
实现效果如下:

牙齿识别项目
对通过摄像头输入的每一帧执行以下算法处理。
通过蓝色滤镜去除杂音/为了让牙齿间的分隔线清晰可辨。
图像二进制化(黑白)/OpenCV提供的Contour函数。
边缘检测识别牙齿形状。
Threshold指定变量K值,对RGB值大于K值的区域进行Threshold处理。此外,K值被指定为与牙齿颜色最相似的值。
采用多边形顶点提取/OpenCV的Contour函数,探索与牙齿形状相似的多边形,并将每个点的集合存储在多边形数据结构中。
关键问题
不能保证在主要的牙齿识别算法中提取的多边形是一个牙齿形状的多边形。这种误认为在大多数情况下,2~3颗牙齿被认为是一个多边形,因此在实际牙科诊疗中使用不足,而非模型模型。
此外,为了解决这个问题,我们利用递归方法再次从一个多边形内部提取牙齿形状,并利用多边形顶点内角来解决多个牙齿下的问题。
代码如下:
#pragma once
#include "opencv2/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
using namespace std;
class teeth {
private:
int k=180;
public:
teeth(int _k) {
k = _k;
};
int run(Mat& frame) {
Mat b = frame.clone();
auto size = b.size();
char str[255];
sprintf(str, "K=%d", k);
putText(frame, str, Point(10, 40), 2, 1.3, Vec3b(255, 0, 0));
for (int i = 0; i < size.height; i++)
{
for (int j = 0; j < size.width; j++) {
auto& p = b.at<Vec3b>(i, j);
float f = (p[0] + p[1] + p[2]) / 3;
if (f > k && (p[0]>k && p[1]>k && p[2]>k)) { p[0] = 255; p[1] = 255; p[2] = 255; }
else { p[0] = 0; p[1] = 0; p[2] = 0; }
}
}
teetdetect(k, b, frame);
int key = waitKey(30);
if (key == 27)return 0;
else if (key == 119)k += 10;
else if (key == 115)k -= 10;
return 1;
};
void teetdetect(int k, Mat& frame, Mat& org) {
Mat gray;
vector<vector<Point> > contours;
cvtColor(frame, gray, COLOR_BGR2GRAY);
threshold(gray, gray, k, 255, THRESH_BINARY_INV | THRESH_OTSU);
//imshow("edge", gray);
findContours(gray, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
//contour¸¦ ±Ù»çÈÇÑ´Ù.
vector<Point2f> approx;
Mat img_result = frame.clone();
for (size_t i = 0; i < contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), approx, arcLength(Mat(contours[i]), true)*0.0002, true);
double a = fabs(contourArea(Mat(approx)));
if (a>1000 && a<10000)
{
int size = approx.size();
vector<int> angle;
int fi = -1;
vector<Point2f> ca;
for (int k = 0; k < size; k++) {
int ang = GetAngleABC(approx[k], approx[(k + 1) % size], approx[(k + 2) % size]);
//if (ang >180)break;
ca.push_back(approx[k]);
angle.push_back(ang);
}
if (ca.size() != 0)approx = ca;
size = ca.size();
sort(angle.begin(), angle.end());
int minAngle = angle.front();
int maxAngle = angle.back();
int threshold = 8;
//µµÇüÀ» ÆÇÁ¤ÇÑ´Ù.
/*
if (size <= 3) {
//continue;
setLabel(org, "triangle", contours[i]);
}
else if (size == 4 && minAngle >= 90 - threshold && maxAngle <= 90 + threshold)
setLabel(org, "rectangle", contours[i]);
else if (size == 5 && minAngle >= 108 - threshold && maxAngle <= 108 + threshold)
setLabel(org, "pentagon", contours[i]);
else if (size == 6 && minAngle >= 120 - threshold && maxAngle <= 120 + threshold)
setLabel(org, "hexagon", contours[i]);
else {
setLabel(org, to_string(approx.size()), contours[i]);//¾Ë¼ö ¾ø´Â °æ¿ì¿¡´Â ã¾Æ³½ ²ÀÁöÁ¡ °¹¼ö¸¦ Ç¥
}*/
//cout << "===" << size << " " << a << endl;
//Contour¸¦ ±Ù»çÈÇÑ Á÷¼±À» ±×¸°´Ù.
if (size % 2 == 0) {
line(org, approx[0], approx[approx.size() - 1], Scalar(0, 255, 0), 3);
for (int k = 0; k < size - 1; k++)
line(org, approx[k], approx[k + 1], Scalar(0, 255, 0), 3);
/*
for (int k = 0; k < size; k++)
circle(org, approx[k], 3, Scalar(0, 0, 255));*/
}
else {
line(org, approx[0], approx[approx.size() - 1], Scalar(0, 255, 0), 3);
for (int k = 0; k < size - 1; k++)
line(org, approx[k], approx[k + 1], Scalar(0, 255, 0), 3);
/*
for (int k = 0; k < size; k++)
circle(org, approx[k], 3, Scalar(0, 0, 255));*/
}
}
}
imshow("frame", org);
};
void setLabel(Mat& image, string str, vector<Point> contour)
{
int fontface = FONT_HERSHEY_SIMPLEX;
double scale = 0.5;
int thickness = 1;
int baseline = 0;
Size text = getTextSize(str, fontface, scale, thickness, &baseline);
Rect r = boundingRect(contour);
Point pt(r.x + ((r.width - text.width) / 2), r.y + ((r.height + text.height) / 2));
rectangle(image, pt + Point(0, baseline), pt + Point(text.width, -text.height), CV_RGB(200, 200, 200), CV_FILLED);
putText(image, str, pt, fontface, scale, CV_RGB(0, 0, 0), thickness, 8);
};
int GetAngleABC(Point a, Point b, Point c)
{
Point ab = { b.x - a.x, b.y - a.y };
Point cb = { b.x - c.x, b.y - c.y };
float dot = (ab.x * cb.x + ab.y * cb.y); // dot product
float cross = (ab.x * cb.y - ab.y * cb.x); // cross product
float alpha = atan2(cross, dot);
return (int)floor(alpha * 180.0 / CV_PI + 0.5);
};
};
















 987
987











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











